Область техники, к которой относится изобретение
Изобретение относится к медицинским устройствам, предназначенным для поддержки руки с обеспечением разгрузки и компенсации/восстановления ослабленной мышцы руки в результате заболеваний или травм. В частности, устройство может быть использовано в стационарах или реабилитационных клиниках, в т.ч. при проведении занятий по восстановлению функции/движения руки у пациентов, страдающих неврологическими и ортопедическими заболеваниями, которые проявляются в виде проксимальной ослабленности верхней конечности. Устройство также может быть использовано в домашних условиях для выполнения задач повседневной жизни, облегчающих движение руки у людей со сниженной функцией рук, мышечной дистрофией верхней конечности. Заявляемое изобретение относится непосредственно к устройствам динамической поддержки/опоры руки, реализующим возможность перемещения руки в горизонтальной и вертикальной плоскостях с компенсацией силы тяжести для поддержки руки.
Уровень техники
Известны различные реабилитационные медицинские устройства для восстановления функций костно-мышечной системы конечностей, оказания медицинской реабилитационной помощи и восстановления/поддержания активности верхних конечностей, в т.ч. у пожилых людей и инвалидов.
Из уровня техники известны три основные группы устройств поддержки руки.
Первую группу составляют устройства с упором без вертикального перемещения руки Original MAS (Mobile Arm Support) компании Jaeco Orthopedic (Доступно no состоянию на 01.02.2019 в сети Интернет по ссылке https://www.neurorehabdirectory.corn/rehab-products/original-mobile-arm-support/), в которых положение руки устанавливается и фиксируется на определенной высоте и имеет шарнирное крепление в точке опоры. Устройства преимущественно закрепляются на подвижном объекте, таком как инвалидное кресло, или на неподвижном объекте. Как правило, такие устройства предназначены для конкретных видов деятельности, позволяют совершать только простые движения (сгибание/разгибание) в локтевом и лучезапястном суставах без вовлечения мышц проксимальной части плеча, и не позволяют совершать отведение плеча во фронтальной плоскости; жесткая шарнирная опора не позволяет совершать естественные движения рукой в полном объеме.
Вторую группу устройств составляют системы поддержки руки с добавлением противовесов, которые пассивно компенсируют влияние силы тяжести руки, уравновешивают вес руки в любом диапазоне ее перемещений, например, Mobility Arm компании Nitzbon (Доступно по состоянию на 01.02.2019 в сети Интернет по ссылке https://www.neurorehabdirectory.com/rehab-products/mobility-arm/). Недостатком таких систем является однорычажная конструкция, характеризующаяся неизменным соотношением плеч, на которые прикладывается вес руки и противовесов. Рука, размещенная в ложементе, может двигаться вверх и вниз и вращаться вокруг оси рычагов и подвеса руки. При перемещении руки от оси и к оси балансира изменяется плечо приложения веса руки и нарушается балансировка системы, что значительно снижает эффективность использования таких систем.
Третью группу устройств составляют системы поддержки руки, использующие в своей конструкции механизмы, которые изменяют величину балансирующего момента с помощью изменения плеча приложения силы.
В частности известно устройство поддержки руки, в котором вместо груза использована газовая пружина, а изменение плеча приложения силы реализовано посредством изменения величины балансирующего момента, например, Armon Edero (Доступно по состоянию на 01.02.2019 в сети Интернет по ссылке https://www.neurorehabdirectory.com/rehab-products/armon-edero/ или http://heamedical.se/produkt/armon-edero/), или решение, представленное в патентной публикации CN 106901945, или решение, представленное в патенте на полезную модель RU 166673.
В публикации CN 106901945 представлено устройство, закрепляемое на неподвижном основании, шарнирно соединенным с первым рычагом, позволяющим осуществлять вращение вокруг оси первого рычага; другой конец первого рычага соединен с помощью круглого штифта (с возможностью вращения вокруг него) с концом дугообразной соединительной пластины; нижний конец дугообразной пластины вращается одновременно с верхним ее концом, на котором через осевое соединение закреплен второй рычаг, который может осуществлять перемещения относительно осевого соединения. К одному концу второго рычага присоединена газовая пружина, к другому - универсальный шарнир, посредством которого осуществляется механическая связь с опорной площадкой для предплечья руки. Усилие сопротивления газовой пружины можно изменять посредством изменения точки ее крепления к соединительной пластине с помощью специального механизма.
В публикации RU 166673 представлено механическое устройство для поддержания руки, содержащее ложемент для руки; штангу, дистальный конец которой шарнирно соединен с ложементом с обеспечением подвижности ложемента в вертикальной плоскости; кронштейн, шарнирно соединенный с проксимальным концом штанги с обеспечением подвижности штанги в вертикальной плоскости под действием веса руки; горизонтальную регулировочную планку, на которой закреплен кронштейн; газовую пружину сжатия, дистальный конец которой связан со штангой через передвижной шарнир, размещенный на штанге с возможностью перемещения вдоль нее и фиксации на ней, а проксимальный конец шарнирно связан с регулировочной планкой с возможностью перемещения вдоль нее и фиксации на ней, и дополнительную планку, шарнирно соединенную с регулировочной планкой с обеспечением ее подвижности в горизонтальной плоскости, причем дополнительная планка выполнена с возможностью связи с неподвижной опорой.
Данные решения выгодно отличаются от систем первой группы удобством использования, компактностью и возможностями по перемещению в горизонтальной плоскости. Главным недостатком таких систем является свойство газовой пружины, имеющей «ступень» в усилии в момент перехода от трения покоя к трению скольжения из исходного положения. Это лишает систем плавности, свойственной механическим системам. Кроме того, возможность вертикального перемещения руки ограничена ходом газовой пружины, который связан как с габаритами самой газовой пружины, так и с общими габаритами устройства, весом и инерцией перемещаемых масс. Кроме того, устройство использует рычаг первого рода, что увеличивает размеры рычага на длину плеча. Кроме того, устройство не позволяет регулировать нижнее положение ложемента по вертикали, что существенно ограничивает его функциональные возможности. Такие системы применяются только в качестве ассистивной поддержки при выполнении манипуляций с небольшим диапазоном перемещений руки в положении сидя за столом, и не подходит для восстановления полного объема движений в плечевом суставе.
Наиболее перспективными в третьей группе являются системы, использующие шарнирный механизм в виде параллелограмма с пружинным элементом. В качестве пружинного элемента используются либо эластичные тросы, либо спиральные пружины. Данные системы компактны и при этом масштабируются, могут иметь практически любые диапазоны перемещения и степени свободы. Регулировка величины компенсации веса руки осуществляется с помощью регулировки натяжения пружины, а также, изменения плеча приложения силы тяги пружин.
В частности известен пассивный динамический подлокотник TOP/HELP (Focal Meditech) (Доступно по состоянию на 01.02.2019 в сети Интернет по ссылке https://www.researcheate.net/publication/255959271_An_overview_and_categorization_of_dynamic_arm_supports_for_people_with_decreased_arm_function), конструкция которого содержит стойку с горизонтальным основанием, выполненным с возможностью перемещения по высоте и вращения относительно оси стойки. На одном из концов основании закреплен узел крепления первого рычага, выполненного в виде параллелограмма с эластичными натяжителями между двумя ребрами, которые создают усилие для поддержки руки. Регулировка усилия производится путем растягивания или сжатия натяжителей посредством перемещения и фиксации положения натяжителей на одном из ребер параллелограмма. При изменении положения руки по высоте, первый рычаг (параллелограмм) меняет свою геометрическую форму с изменением расстояния между точками крепления натяжителей на рычагах, и, соответственно, изменением усилия, приложенного к ребрам параллелограмма, создаваемого натяжителями. С другой стороны, к первому рычагу (параллелограмму) присоединена через шарнир система из четырех рычагов, соединенных между собой также с помощью шарниров, позволяющих вращаться рычагам в горизонтальной плоскости. На последнем, дальнем от стойки, рычаге расположен шарнир с ложементом для предплечья руки, который может перемещаться (качаться) относительно точки соединения с рычагом в небольшом диапазоне, ограниченном конструктивными характеристиками шарнира, ложемента и рычага.
Известно также устройство для мобильной поддержки руки SaeboMAS (Доступно по состоянию на 01.02.2019 в сети Интернет по ссылке http://www.saebo.su/products/saebomas/), описанное в заявке US 2013087154 (прототип). Устройство включает поворотную раму, закрепленную на опорной стойке. Поворотная рама включает верхний и нижний удлиненные элементы, шарнирно соединенные с боковыми внутренним и внешним элементами с образованием параллелограмма, в котором внешний боковой элемент выполнен с возможностью перемещения по вертикали (вверх и вниз) относительно внутреннего бокового элемента с сохранением параллельного расположения упомянутых элементов. Устройство содержит также опорный элемент для руки (или ложемент), функционально соединенный с поворотной рамой; и механизм натяжителя, который включает упругий элемент (пружину), при этом механизм натяжителя выполнен с возможностью избирательно регулирования количества силы, необходимой для перемещения опорного элемента относительно внутреннего бокового элемента, а упругий элемент расположен внутри одного из удлиненных элементов и оказывает растягивающее усилие, параллельно его продольной оси.
Недостатком данных систем является нелинейность жесткости пружин и изменение плеча приложения силы при вертикальном перемещении, в связи с чем, при подъеме руки компенсирующее усилие может колебаться в диапазоне более 50%. Это накладывает ограничения на диапазон перемещения руки по вертикали, и, как следствие, на возможности пациента для проведения необходимых манипуляций или тренировочных упражнений. В результате в диапазоне движения руки возникают мертвые зоны, в которых естественные движения невозможны. В процессе восстановления двигательной функции руки наличие «мертвых зон» способствует формированию патологичных двигательных паттернов, компенсирующих недостаток диапазона движения. Например, ограничение движения при отведении плеча за счет дельтовидных мышц приводит к компенсаторному повышению тонуса верхней порции трапециевидной мышцы и глубоких мышц шеи.
Раскрытие изобретения
Технической проблемой, решаемой изобретением, является разработка устройства динамической поддержки руки, характеризующегося отсутствием недостатков, присущих перечисленным выше аналогам и прототипу.
Технический результат проявляется в обеспечении физиологического диапазона движения руки с максимально возможным постоянным усилием поддержки руки во всем диапазоне перемещения при минимальной инерционности устройства.
Технический результат достигается тем, что в устройстве для поддержки руки, включающем опорную стойку с закрепленным на ней корпусом с возможностью поворота относительно вертикальной оси опорной стойки; поворотную раму, закрепленную в корпусе с возможностью вращения относительно вертикальной оси опорной стойки в горизонтальной плоскости и углового перемещения относительно горизонтальной оси крепления рамы к корпусу в вертикальной плоскости, при этом рама включает верхний элемент в виде первого рычага, нижний элемент в виде тяги, которые шарнирно соединены с корпусом и с боковым элементом с образованием параллелограмма; опорный элемент для руки, функционально соединенный с поворотной рамой через второй рычаг, при этом второй рычаг выполнен с возможностью поворота относительно вертикальной оси соединения второго рычага с поворотной рамой, а опорный элемент для руки - с возможностью поворота относительно вертикальной и горизонтальной осей, посредством которых реализовано соединение опорного элемента со вторым рычагом; блок натяжителя, закрепленный в корпусе, включающий упругий элемент, связанный с поворотной рамой с возможностью регулировки усилия натяжения упругого элемента для компенсации веса руки; согласно изобретению, первый рычаг поворотной рамы выполнен с плечом, реализующим функцию приводного кронштейна, расположенным с противоположной стороны от горизонтальной оси крепления рамы к основанию, блок натяжителя расположен с противоположной стороны от поворотной рамы относительно оси опорной стойки, при этом в качестве упругого элемента блока натяжителя использована, по меньшей мере, одна пружина постоянного усилия, свободный конец которой соединен с приводным кронштейном с возможностью регулирования усилия натяжения пружины.
Корпус может быть выполнен в виде двух плоских металлических пластин, между которыми на горизонтальных осях закреплены пружинные элементы.
В качестве пружин постоянного усилия могут быть использованы две пружины серии KKF с суммарным усилием не менее 120 Н.
Приводной кронштейн предпочтительно выполнен из стали, а первый и второй рычаги - из алюминиевых сплавов.
В одном из вариантов осуществления изобретения для регулировки усилия натяжения упругого элемента блок натяжителя снабжен размещенным в приводном кронштейне винтом, выполненным с рукояткой и элементом крепления конца упругого элемента с возможностью перемещения по винту и фиксации в выбранном положении, при этом приводной кронштейн снабжен соответствующим пазом для размещения винта с упомянутым элементом, а также шкалой для контроля усилия пружины. Длина паза на приводном кронштейне с размещенным в нем винтом выбрана с обеспечением трехкратного изменения компенсирующего усилия. Начальное положение паза с размещенным в нем винтом выбрано на расстоянии не более 65 мм от горизонтальной оси крепления первого рычага на корпусе, а конечное - не менее 205 мм.
Первый рычаг в общем случае может быть выполнен длиной от 350 мм до 450 мм, при этом блок натяжителя включает два упругих элемента в виде пружин постоянного усилия с суммарным усилием до 12 кг.
Перемещение рамы относительно горизонтальной оси крепления рамы к корпусу может быть ограничено углом поворота ±30° от горизонтального положения посредством ограничителя, закрепленного в корпусе.
Боковой элемент рамы может быть выполнен в виде кронштейна, на котором закреплена вертикальная ось соединения второго рычага с поворотной рамой.
Первый и второй рычаги выполнены длиной, обеспечивающей возможность подведения опорного элемента для руки к опорной стойке.
Опорный элемент для руки снабжен съемными ремнями.
В конкретном варианте осуществления изобретения вертикальные оси и горизонтальные оси первого рычага установлены в радиально-упорных подшипниках, при этом оси на концах имеют резьбовой участок для регулировки величины зазоров в радиально-упорных подшипниках.
Второй рычаг предпочтительно выполнен с замкнутым профилем поперечного сечения.
Опорная стойка может быть закреплена на горизонтальной рабочей поверхности или на передвижном основании.
Приводной кронштейн предпочтительно выполнен в виде продолжения первого рычага. В одном из вариантов осуществления изобретения первый рычаг и приводной кронштейн изготовлены из двух разных деталей, соединенных между собой известными методами крепления.
Опорная стойка может быть выполнена с возможностью изменения высоты с фиксацией выбранного положения.
Заявляемая конструкция позволяет с минимальным сопротивлением и инертностью совершать естественные движения рукой в полном объеме, активно вовлекая в движение плечевой и локтевой суставы. Точная регулировка компенсирующего усилия пружинного механизма позволяет нивелировать вес конечности, открывая возможности совершать активные движения даже при минимальной сохранности мышечной силы, что позволяет достигать наилучший результат в процессе восстановительного лечения больных с двигательными нарушениями верхних конечностей, сводя до минимума патологические воздействия заболевания на пациента. Таким образом, устройство обеспечивает минимальное изменение компенсирующего усилия от веса руки в крайней верхней точке и крайней нижней точке, что проявляется в перемещении руки вверх и вниз без дополнительного сопротивления. При этом регулирование усилия пружины возможно самим пациентом.
Технический результат достигается за счет применения схемы балансирующих «качелей», в которых компенсирующее усилие формируется с помощью пружин постоянного усилия, действующих с противоположной руке стороны относительно оси вращения (оси стойки) и в противоположном направлении. Регулировка величины компенсирующего усилия осуществляется за счет изменения плеча приложения силы пружины постоянного усилия. Схема балансирующих «качелей» имеет преимущество по сравнению с системами, в которых пружинный элемент расположен с той же стороны, с которой и рука (консольная схема), за счет того, что в схеме «качелей» часть веса самого устройства компенсируется весом противоположной части «качелей». В консольных системах пружина должна компенсировать вес руки и вес устройства, из-за чего усиливается неравномерность компенсирующего усилия, так как вес руки составляет только часть компенсируемого усилия, а колебания величины компенсирующего усилия из-за изменения длины пружины и плеча приложения силы при вертикальном перемещении приходятся на вес всей системы «рука» плюс «устройство». Для пациента такое изменение усилия более ощутимо. В системах с балансирующими «качелями» часть веса устройства компенсируется весом противоположной части. Для улучшения балансировки часть устройства со стороны руки может быть выполнено из алюминиевых сплавов, а часть устройства со стороны пружин постоянного усилия - из обычных углеродистых сталей. Также преимуществом является применение пружин постоянного усилия в отличие от эластичных элементов и традиционных пружин постоянной жесткости. В пружинах постоянной жесткости усилие меняется пропорционально длине вытяжения, что приводит к неравномерности компенсирующего усилия при вертикальном перемещении руки. Пружины постоянного усилия лишены данного недостатка.
Дополнительным преимуществом данного технического решения является возможность регулировки высоты устройства, позволяющая выполнять упражнения в положении сидя и стоя, что способствует развитию координации и равновесия пациента в условиях максимально приближенных к естественным.
Другим дополнительным преимуществом данного технического решения является возможность масштабирования устройства, которая не обеспечивается в консольных системах, в которых вес устройства, габаритные размеры пружинных элементов, высота перемещения, усилие, развиваемое пружинами, связаны между собой, и при масштабировании устройства возникают существенные ограничения, в частности, увеличенная жесткость пружины приводит к увеличению габаритов и соответственно веса устройства и т.д. В заявляемой конструкции возможна установка пружины практически любого усилия без изменения подвижной части, диапазон вертикального перемещения может быть легко увеличен за счет удлинения плеча «качелей» со стороны руки (первого и второго рычагов устройства), а увеличенный вес скорректирован противовесом на приводной части «качелей». Это позволяет использовать устройство для работы по перемещению самой руки, а также руки с каким-либо тяжелым предметом, например, рабочим инструментом, что значительно расширяет сферу применения данного устройства.
Таким образом, в заявляемом устройстве в качестве компенсирующего момента от веса руки используется пружина(ы) постоянного усилия, например, ленточные пружины, с постоянным усилием вытяжения. Конструкция реализована по принципу качелей - на одной стороне которых от оси вращения находится вес руки пациента, на другой - сила, создаваемая пружиной. Точка приложения силы пружины может удаляться или приближаться от оси качелей, тем самым меняя значение крутящего момента от пружины для компенсации различного веса руки. Чтобы опора для руки совершала плоскопараллельные движения при перемещении по высоте, в конструкции использована схема с шарнирным параллелограммом (по аналогии с прототипом), выполненным длиной, соответствующей средней величине предплечья человека, и закрепленным на вертикальной стойке. Место расположения пружины выбрано так, чтобы вне зависимости от угла поворота в пределах ±30 градусов от горизонтали, значение плеча приложения силы не изменялось более чем на 25% для каждого положения нагрузки. Вес противоположных частей «качелей» подобран так, чтобы максимально уравновешивать плечи «качелей» без приложения нагрузки. Блок с пружинами постоянного усилия располагается максимально близко к вертикальной оси вращения устройства для уменьшения момента инерции от всего устройства.
Краткое описание чертежей
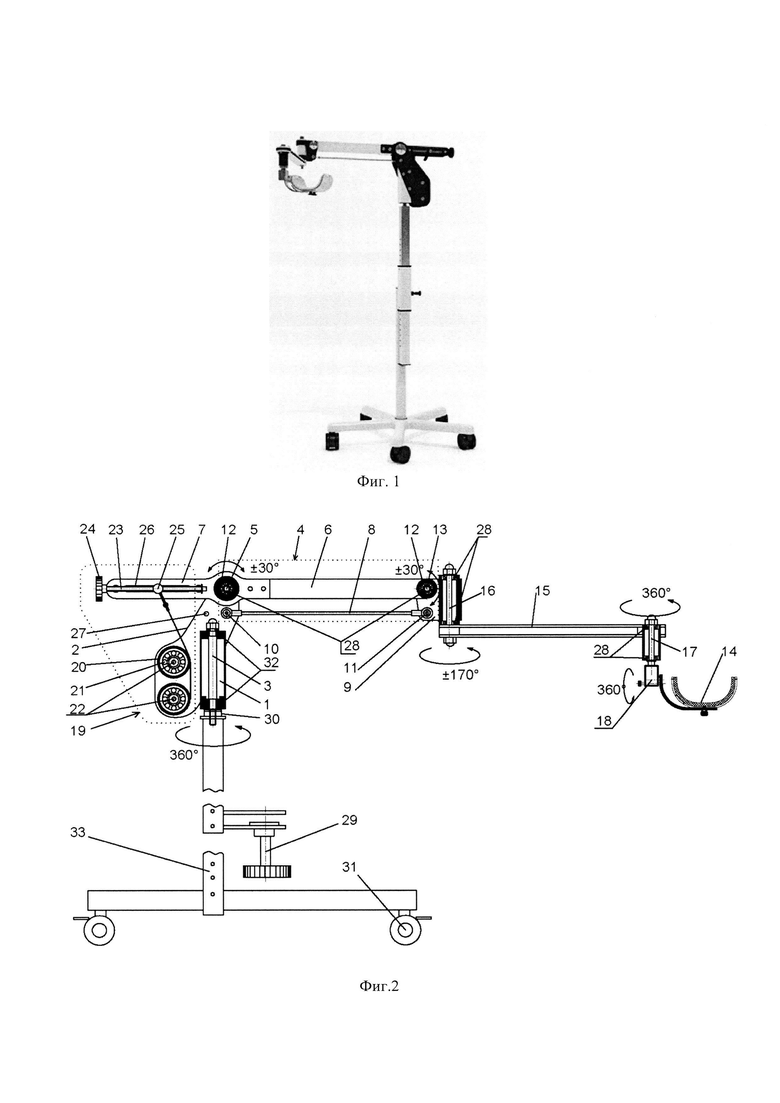
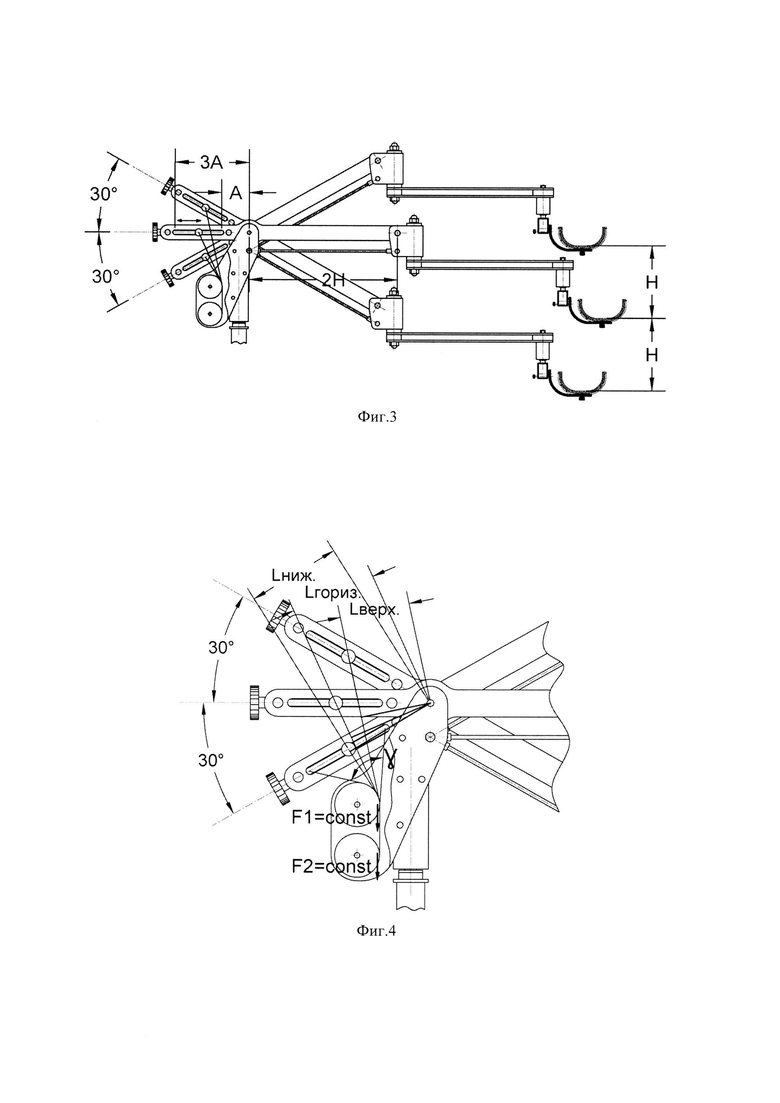
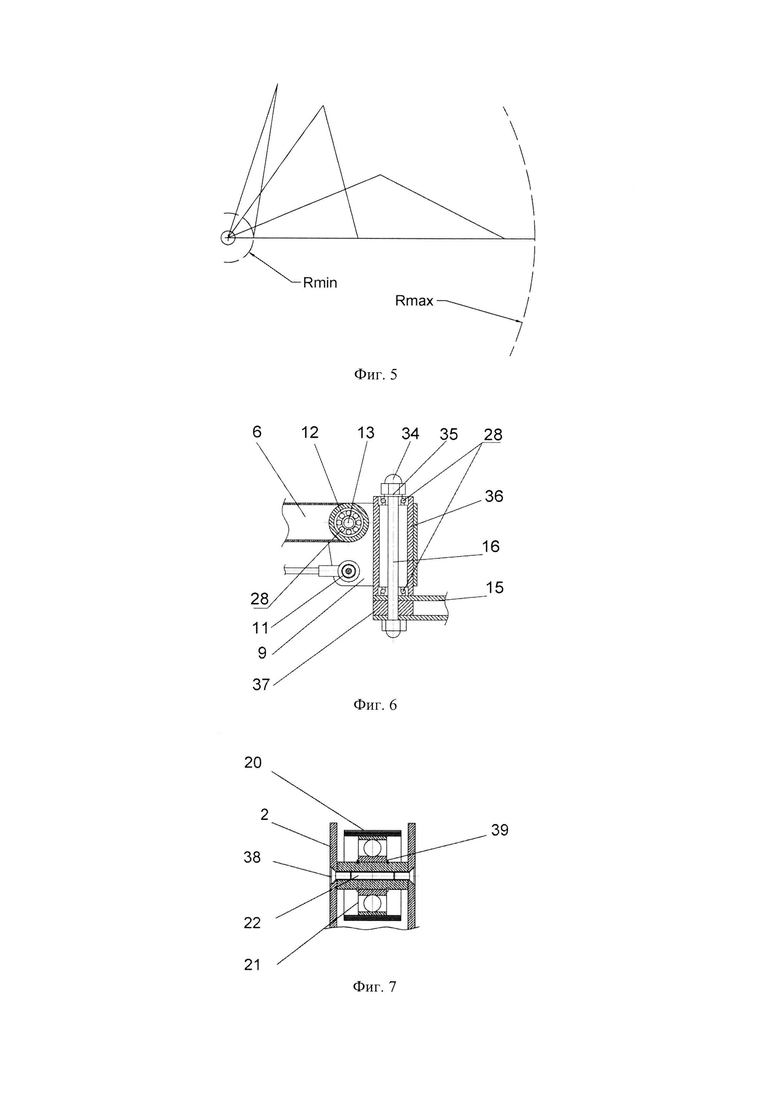
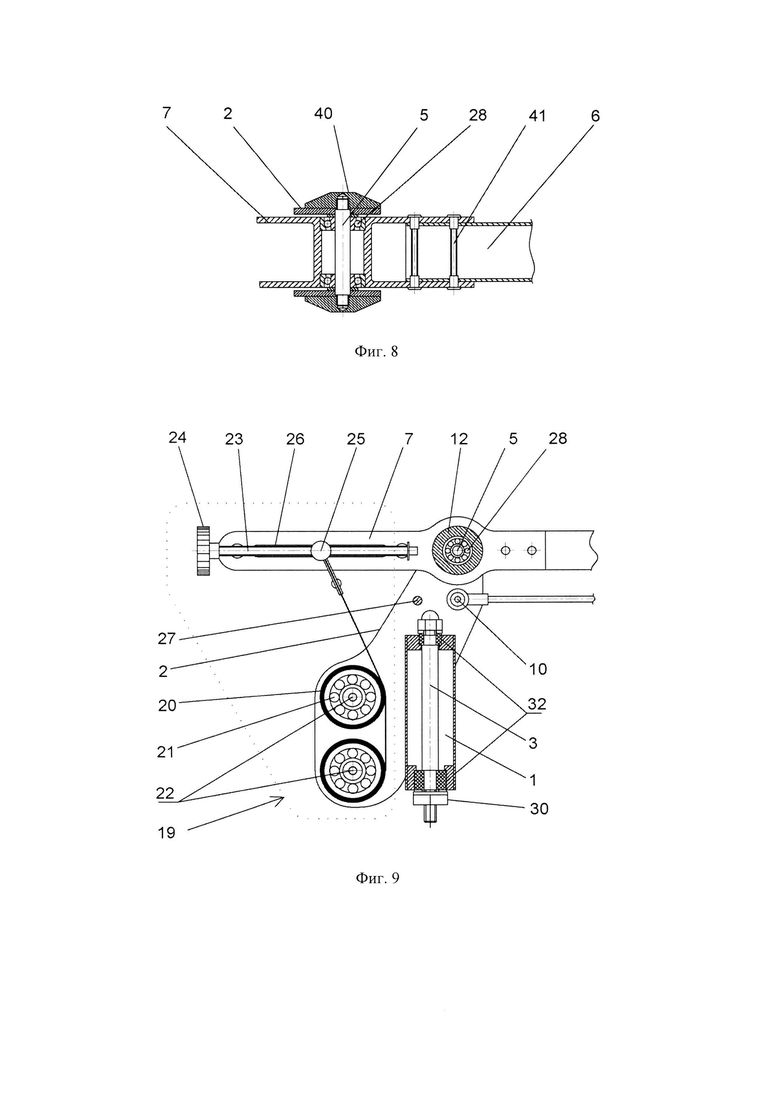
Изобретение поясняется чертежами и фотографиями. На фиг. 1 представлена фотография общего вида устройства; на фиг. 2 - устройство, вид сбоку, на котором представлен поперечный разрез отдельных узлов/блоков; на фиг. 3 и фиг. 4 - схема перемещения опоры для руки в вертикальной плоскости, и изменения длины плеча приложения силы тяги пружин при изменении углового положения первого рычага устройства; на фиг. 5 - схема возможных положений рычагов устройства и доступных зон для руки; на фиг. 6 - 9 - представлены отдельные узлы заявляемого устройства, демонстрирующие возможные варианты выполнения/соединения отдельных элементов конструкции, а именно, на фиг. 6 - узел соединения поворотной рамы и второго рычага устройства в вертикальном сечении по оси 16 (аналогично выполнена ось 17, соединяющая второй рычаг 15 с ложементом 14); на фиг. 7 - пружина постоянного усилия в горизонтальном сечении по оси пружины; на фиг. 8 - узел соединения первого рычага 6 поворотной рамы 4 с приводным кронштейном 7 в горизонтальном сечении по си 5 (аналогично выполнена ось 13 соединения первого рычага 6 с боковым элементом 9); на фиг. 9 - узел соединения корпуса пружинного блока 2 с поворотной рамой 4 и приводным кронштейном 7, а также с вертикальной осью 3 опорной стойки 33.
Позициями на фигурах обозначены:
1. - опорная стойка,
2. - корпус пружинного блока,
3. - вертикальная ось опорной стойки,
4. - поворотная рама
5. - горизонтальная ось крепления рамы в корпусе 2,
6. - первый рычаг поворотной рамы 4,
7. - плечо первого рычага 6, выполняющее функцию приводного кронштейна (приводной кронштейн),
8. - тяга поворотной рамы 4,
9. - боковой элемент поворотной рамы (который может быть выполнен в виде кронштейна),
10. - шарнирное соединение тяги 8 с корпусом 2, например, в виде шарнирного наконечника,
11. - шарнирное соединение тяги 8 с боковым элементом 9, например, в виде шарнирного наконечника,
12. - шарнирное соединение первого рычага 6 с корпусом 2, и с боковым элементом 9,
13. - горизонтальная ось соединения первого рычага 6 с боковым элементом 9,
14. - опорный элемент для руки (ложемент),
15. - второй рычаг,
16. - вертикальная ось соединения второго рычага 15 с поворотной рамой 4,
17. - вертикальная ось соединения ложемента для руки со вторым рычагом 15,
18. - горизонтальная ось соединения ложемента для руки со вторым рычагом 15,
19. - блок натяжителя (регулировки сопротивления перемещению руки),
20. - упругий элемент, выполненный в виде пружины постоянного усилия,
21. - подшипник, размещенный в упругом элементе 20,
22. - ось размещения подшипника 21 для упругого элемента 20,
23. - винт блока натяжителя 19,
24. - рукоятка винта 23,
25. - элемент крепления конца упругого элемента 20 к винту 23, который может быть выполнен в виде гайки,
26. - паз, выполненный в приводном кронштейне 7, для размещения винта 23 и индикации положения конца упругого элемента 20,
27. - ограничитель углового перемещения поворотной рамы 4 в вертикальной плоскости, закрепленный в корпусе 2,
28. - радиально-упорные подшипники всех вертикальных осей и горизонтальных осей первого рычага,
29. - струбцина для крепления устройства на горизонтальной поверхности, например, на столе или на инвалидной коляске,
30. - контргайка,
31. - колесная опора,
32. - подшипники скольжения, размещенные на вертикальной оси 3,
33. - средство регулировки опорной стойки по высоте,
34. - гайка колпачковая,
35. - шайба,
36. - втулка,
37. - контргайка,
38. - винт,
39. - кольцо стопорное,
40. - гайка декоративная,
41. - резьбовая стяжка.
Осуществление изобретения
Заявляемое изобретение представляет собой устройство для опоры или поддержки руки и обеспечивает динамическое сопротивление ее перемещению (вверх или вниз) независимо от положения руки относительно тела (путем компенсации сил тяжести). Устройство снабжено блоком регулировки сопротивления перемещению руки с возможностью индивидуальной настройки под каждого пациента, а также, регулируемой по высоте стойкой, позволяющей располагать устройство в удобном для пациента месте, на удобной высоте.
Ниже представлено более подробное описание заявляемого изобретения, не ограничивающее сущность, представленную в независимом пункте формулы, а лишь демонстрирующее возможность достижения заявленного технического результата.
Настоящее изобретение может подвергаться различным изменениям и модификациям, понятным специалисту на основе прочтения настоящего описания. Такие изменения не ограничивают объем притязаний. Например, могут применяться различные средства соединения конструктивных элементов устройства, известные из уровня техники, обеспечивающие возможность перемещения/вращения отдельных деталей устройства; средства регулировки высоты устройства; средства установки и/или закрепления устройства на опорной поверхности; материалы выполнения отдельных деталей; может использоваться любое количество пружин блока натяжителя (или пружинного блока), соединенных между собой для создания требуемого усилия; ложемент для размещения руки может иметь различную конструктивную реализацию; устройство может быть снабжено электро- или гидроприводом изменения его высоты, а также средством регулировки плеча приложения силы от упругого элемента, которое также может выполняться с использованием шаговых двигателей, линейных актуаторов и т.д. Исходя из конкретных задач и сферы применения устройства, оно может быть снабжено различными дополнительными вспомогательными приспособлениями, датчиками и инструментами регулировки отдельных блоков и конструктивных элементов. Устройство может быть реализовано полностью или частично в зеркально симметричном исполнении относительно горизонтальной плоскости.
Ниже представлено детальное описание осуществления изобретения на примере конкретной реализации отдельных деталей и узлов (см. фиг. 1-9).
Устройство размещено на вертикальной опорной стойке 1, которая в одном из вариантов осуществления изобретения может быть закреплена на отдельно стоящем основании с колесной опорой 31. В другом варианте осуществления изобретения вертикальная опорная стойка 1 может быть закреплена, например, с помощью струбцины 29 на рабочей поверхности (например, на поверхности стола). В одном из вариантов реализации изобретения вертикальная стойка может быть выполнена из двух частей, перемещающихся друг относительно друга (например, в виде телескопического механизма) с возможностью фиксации выбранного положения с помощью цилиндрического штифта, устанавливаемого в отверстиях, выполненных в стенках отдельных частей стойки.
Устройство включает закрепленные на стойке, например, посредством корпуса 2, поворотную раму 4, функционально соединенную с ложементом 14 для размещения руки; блок натяжителя 19, включающий упругие элементы 20 (пружинный блок), функционально связанные с элементами регулировки сопротивления перемещению руки, размещенными на плече 7 (приводном кронштейне), являющимся продолжением рычага 6 поворотной рамы 4.
Корпус 2 предназначен для безопасного размещения в нем пружин, а также является основанием для закрепления на нем отдельных конструктивных блоков и элементов. В этой связи, корпус может иметь различное конструктивное решение, обеспечивающее упомянутые функции.
Поворотная рама 4 выполнена с возможностью вращения относительно вертикальной оси 3 и углового перемещения в вертикальной плоскости относительно горизонтальной оси 5. Вращение поворотной рамы 4 относительно вертикальной оси 3 может быть реализовано посредством закрепления рамы в корпусе 2, который в свою очередь закреплен на втулке, имеющей резьбовую ось 3 с подшипниками скольжения 32, которая через контргайку 30 соединена с опорной стойкой 1. Угловое перемещение поворотной рамы 4 в вертикальной плоскости относительно горизонтальной оси 5 может быть реализовано посредством размещения упомянутой оси непосредственно на рычаге 6 поворотной рамы и ее закреплением в корпусе 2 на радиально-упорных подшипниках 28.
Пружинный блок в одном из вариантов осуществления изобретения включает две пружины постоянного усилия 20, размещенные в корпусе 2. В качестве пружин постоянного усилия могут быть использованы пружины серии KKF (http://www.itkstr.ru/assets/dowriload/spiralnvie.pdf) или аналогичные. Пружины 20 установлены на подшипниках 21 для уменьшения сопротивления разматыванию, которые в свою очередь установлены на закрепленных в корпусе 2 осях 22.
Поворотная рама выполнена по аналогии с прототипом, включает верхний и нижний удлиненные элементы - первый рычаг 6 и тягу 8, соответственно, шарнирно соединенные с боковыми внутренним и внешним элементами с образованием параллелограмма. При этом в качестве бокового внутреннего элемента выступает корпус 2, а в качестве бокового внешнего элемента - элемент 9, который может быть выполнен в виде кронштейна. Внешний боковой элемент 9 выполнен с возможностью перемещения по вертикали (вверх и вниз) относительно внутреннего бокового элемента с сохранением параллельного расположения упомянутых элементов.
Особенностью заявляемого изобретения является выполнение поворотной рамы 4 с плечом 7 (приводным кронштейном), которое соединено с первым рычагом 6 рамы 4, и, по сути, является его продолжением, а также выполнение блока натяжителя 19, который расположен со стороны, противоположной размещению ложемента относительно опорной стойки, и включает расположенный в корпусе 2 пружинный блок и отдельные конструктивные элементы регулировки усилия пружин для обеспечения требуемого сопротивления перемещению руки - паз 26 с размещенным в нем винтом 23, снабженным рукояткой 24 и элементом 25, обеспечивающим крепление конца упругого элемента 20 к винту 23.
Плечо 7 (приводной кронштейн) поворотной рамы 4 предпочтительно выполнено из углеродистой стали для компенсации веса противоположной части устройства - поворотной рамы 4, соединенной со вторым рычагом 15 и ложементом 14, предпочтительно выполненными из легких сплавов алюминия. Приводной кронштейн 7 снабжен осевым пазом 26 с размещенным в нем стальным винтом 23 с трапецеидальной резьбой для облегчения и ускорения регулировки компенсирующего усилия. Винт 23 снабжен гайкой 25, выполненной с возможностью перемещения по винту, при этом гайка снабжена креплением пружин 20. Гайка 25 перемещается при вращении рукоятки 24, размещенной на конце винта 23. Диапазон перемещения гайки выбран с возможностью обеспечения трехкратного изменения компенсирующего усилия. В одном из вариантов осуществления изобретения начальное положение паза с винтом размещено на расстоянии не более 65 мм от оси 5, конечное - не менее 205 мм. Это обеспечивает трехкратное изменение величины компенсирующего усилия, достаточное для охвата необходимого диапазона регулировки, при минимальных габаритах устройства с подобранным усилием. Изменение плеча приложения силы в три раза позволяет изменять величину крутящего момента в три раза, М=F×L, где F - суммарная сила пружин постоянного усилия, для взрослого человека (наиболее подходящее значение 120 Н при выбранной схеме), L -плечо приложения силы изменяемое в диапазоне 65-205 мм для руки взрослого человека. К приводному кронштейну 7 прикреплен первый рычаг 6, являющийся продолжением приводного кронштейна 7. При постоянстве длины первого рычага 6 при изменении величины крутящего момента в три раза, также в три раза меняется усилие на конце упомянутого рычага. Усилие от 2 до 6 кг покрывает практически полностью необходимый диапазон значений для веса руки взрослого человека. При длине первого рычага 400 мм могут быть использованы две пружины усилием по 6 кг. В конструкции предусмотрена также возможность изменения номинального значения компенсируемого усилия за счет изменения количества или усилия пружин. При установке одной пружины вместо двух устройство может использоваться для детской реабилитации. При увеличении силы пружин, например, посредством использования двух пружин по 10 кг или в комбинации 10 и 6 кг, конструкцию можно применять для решения специальных задач, например, для компенсации веса руки вместе с инструментом, что является актуальным при использовании заявляемого устройства, например, при проведении реставрационных работ или любых других работ, связанных с длительным удержанием руки в определенном положении.
К внешнему боковому элементу 9 поворотной рамы 4 в продолжение приводного кронштейна 7, прикреплен второй рычаг 15, связанный с первым рычагом 6 через вертикальную и горизонтальную оси вращения, закрепленные на боковом элементе 9, который может быть выполнен в виде кронштейна. При этом горизонтальная ось вращения 13 может быть размещена в шарнирном соединении 12, а вертикальная - ось 16 - во втулке, закрепленной на упомянутом кронштейне 9. Второй конец тяги 8 также закреплен на кронштейне 9 (первый конец тяги закреплен в корпусе 2).
Тяга 8 с двумя шарнирными наконечниками 10 и 11 используется для сохранения горизонтального положения поддержки руки. Для ограничения угла поворота используется ограничитель 27, который может быть выполнен в виде перемычки, вваренной в корпус 2. Угол поворота поворотной рамы, а именно, первого рычага поворотной рамы, задан ±30° от его горизонтального положения (фиг. 5). В данном угловом диапазоне движение по радиусу дуги не сильно отличается от прямолинейного движения и позволяет комфортно использовать поддержку руки. Рядом с горизонтальной осью 13 располагается вертикальная ось вращения 16 второго рычага 15. Для сохранения положения руки в пространстве при повороте вокруг оси 16 предназначена ось 17. Расстояние между осями 5 и 13 предпочтительно равно расстоянию между осями 16 и 17, для возможности подведения руки вплотную к опорной стойке 1 (или вертикальной оси 3). Ложемент 14 служит для размещения руки с ее фиксацией, например, с помощью съемных ремней. Все оси 5, 13, 16 и 17 установлены с помощью радиально-упорных подшипников для снижения трения при вращении.
Элементы устройства: ограничитель 27, первый рычаг 6, тяга 8, кронштейн 9 по осям 5, 13 и точкам крепления тяги 8 в шарнирных наконечниках 10 и 11 образуют параллелограмм, который обеспечивает при движении поворотной рамы 4 вверх или вниз вертикальное положение оси 16 в кронштейне 9, и соответственно, горизонтальное положение второго рычага 15. Подвижные элементы соединены с помощью осей 5, 13, 16 и 17, которые снабжены резьбой на концах для поджима и выбора зазоров в радиально-упорных подшипниках. Корпуса осей 16 и 17 могут быть выполнены в виде втулок, закрепленных на противоположных концах второго рычага, выполненного из алюминиевого сплава, преимущественно замкнутого профиля. Второй рычаг 15 с одной стороны связан осью 16 с кронштейном 9, а с другой стороны вертикальной осью 17 с ложементом 14. В нижней части ось 17 соединена шарниром с горизонтальной осью 18, вокруг которой вращается ложемент (для предплечья) 14. Наличие в шарнире двух взаимно перпендикулярных осей позволяет перемещать ложемент 14 (опоры для руки) в пространстве в любом направлении. Положение руки пациента в пространстве может меняться при воздействии руки через ложемент 14, шарнир с горизонтальной осью 18, вертикальной осью 17, второй рычаг 25, кронштейн 9, на первый рычаг 6, который при этом может вращаться вокруг оси 5 в вертикальной плоскости и оси 3 в горизонтальной плоскости.
Заявляемая конструкция устройства поддержки руки позволяет свободно перемещаться в объеме, ограниченном максимальным радиусом и высотой перемещения. Благодаря трем вертикальным осям 3, 16 и 17 со свободным вращением, опору руки -ложемент 14, можно привести в любую точку области, ограниченную максимальным радиусом, равным разложенной длине поддержки руки (суммарной длине первого и второго рычагов) и минимальным радиусом - размером стойки. По высоте ложемент 14 перемещается за счет вращения вокруг оси 5 и удерживается в горизонтальном положении за счет наличия тяги 8. Величина перемещения руки по высоте по вертикали Н+Н равна расстоянию между осями вращения 5 и 13 за счет углов поворота ±30 градусов.
Заявляемая конструкция реализует возможность компенсации веса руки с максимально равномерным усилием при перемещении. В качестве компенсирующего усилия используется одна или несколько пружин постоянного усилия. Пружина создает вращающий момент, который трансформируется в поддерживающее усилие в соотношении А/2Н исходя из равенства моментов, в связи с чем, можно подбирать усилие пружин и величину перемещения в зависимости от поставленных задач. Пружины могут быть объединены в пару, за счет чего можно подбирать диапазон усилия с помощью сложения сил или использования одной пружины вместо двух. Расположение пружин, а именно, угол γ по касательной к пружине между крайними положениями регулировки подобрано так, чтобы минимизировать колебания плеча приложения силы L в зависимости от угла поворота: Lгориз/Lверх или Lгориз/Lниж не превышает 25%. При этом регулировка усилия производится при перемещении точки приложения усилия по пазу 26. Перемещение осуществляется с помощью вращения рукоятки 24.
При использовании устройства пациент в удобном для него положении размещает предплечье на опоре для руки - в ложементе 14. При необходимости, рука может быть дополнительно зафиксирована на опоре, например, с помощью гибкого ремня и т.п. Пациент выбирает высоту расположения руки в пространстве, углы сгиба в плечевом и локтевом суставах. В этом положении производится фиксация высоты стойки и балансировка устройства с помощью пружин 20 и положения крепления для пружин 25 с помощью рукоятки 24. В равновесном состоянии момент силы - сила тяжести руки, на плече первого рычага, удаленного от центра оси 5, должна быть примерно равна силе воздействия пружин 20, приложенной к плечу, определяемому расстоянием от места расположения крепления для пружин 25 до центра оси 5. При этом не всегда требуется точная компенсация упомянутых усилий. Например, для решения определенных задач, связанных с тренировкой мышц руки, с помощью блока натяжителя может осуществляться регулирование усилия пружин с обеспечением дополнительное сопротивления при перемещении руки. Равновесное состояние - сила тяжести от руки на плече от оси 5 до оси 13 плюс момент вращения от правой части устройства (постоянная величина) должен быть равен моменту от левой части устройства (постоянная величина) плюс момент от пружин - произведение высоты опущенной из оси 5 на линию натяжения пружины из точки 25 по касательной к пружине, на силу пружины, а именно:
Fn*Lпр+Mприв=Mпод+mg*L1,
где: Fn - суммарное усилие от пружин постоянного усилия от 1 до n штук, Lnp - перпендикуляр, проведенный из центра вращения оси 5 к пружине, соответствует Lнижн, Lгориз, Lверx на фиг. 4, Mприв - момент вращения от веса приводной части поддержки руки (постоянное значение), Мпод - момент вращения от поддерживающей части устройства (постоянное значение), mg - сила тяжести руки, L1 - расстояние между осями 5 и 13 (постоянная величина).
После балансировки устройства пациент может менять положение руки по любой траектории в зоне, доступной и определяемой размерами рычагов 6 и 15 устройства. Доступная по угловому перемещению зона определяется в основном углом возможного перемещения первого рычага 6 относительно оси 5 - в одном из вариантов реализации +/-30 градусов относительно горизонтали (фиг. 3, 4).
Пример реализации изобретения.
Было изготовлено устройство для поддержки руки (см. фиг. 1), в котором были использованы две пружины постоянного усилия по 60 Н; расстояние между осью вращения 5 и 13 составляло 400 мм, расстояние между осями 16 и 17 - 400 мм, угол поворота первого рычага ±30 градусов, диапазон регулировки точки приложения силы пружин составлял 65-205 мм от оси вращения поз. 5, ось вращения верхней пружины постоянного усилия была расположена на расстоянии 150 мм по вертикали и 105 мм по горизонтали от оси вращения 5, приводной кронштейн был выполнен из стали с плотностью 7850 кг/м.куб., первый и второй рычаги выполнены из алюминиевых сплавов с плотность 2730 кг/м.куб.
В качестве тестовых испытаний к ложементу для руки подвешивались грузы массой 2 кг, 3 кг, 4 кг, 5 кг, 6 кг. С помощью регулировки блока натяжителя добивались уравновешивания груза в горизонтальном положении. Далее перемещали ложемент в крайние положения с помощью динамометра, замеряя максимальное усилие. Во всем диапазоне измерений усилие не превысило 0,5 кг. В большинстве диапазона перемещения не превышает 0.15 кг. В связи с чем, обеспечивалось максимально возможное постоянное усилие поддержки руки во всем диапазоне движения руки при минимальной инерционности устройства.
Таким образом, заявляемая конструкция позволяет с минимальным сопротивлением и инерционностью совершать естественные движения рукой в полном объеме, включая (сгибание/разгибание) в локтевом и лучезапястном суставах с вовлечением мышц проксимальной части плеча, отведение плеча во фронтальной плоскости, производить точную регулировку компенсирующего усилия. За счет малого отклонения компенсирующего усилия от выставленного значения во всем диапазоне движения позволяет работать с больными с очень сложными повреждениями с самого начала реабилитации. За счет исполнения с разным усилием устройство подходит для медицинской реабилитации детей и взрослых, а также возможности использования устройства в других областях в качестве поддержки руки при проведении различных работ.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональный тренажер для коррекции осанки | 2017 |
|
RU2768670C2 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ | 2005 |
|
RU2295468C1 |
| Способ видеосъемки и система для его реализации | 2019 |
|
RU2705102C1 |
| НАТЯЖИТЕЛЬ ДЛЯ ПОДВОДНОЙ УКЛАДКИ ШЛАНГОКАБЕЛЯ И ТРУБ РАЗЛИЧНОГО ДИАМЕТРА | 2023 |
|
RU2822577C1 |
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Устройство для продолжительной иммобилизации и вытяжения при переломе костей голени в предоперационном периоде | 2022 |
|
RU2807393C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| СПАСАТЕЛЬНАЯ СИСТЕМА С ВНЕШНЕЙ ПОДВЕСКОЙ К ЛЕТАТЕЛЬНОМУ АППАРАТУ | 2014 |
|
RU2563291C1 |
| БЕЗОПАСНЫЕ КАЧЕЛИ | 2014 |
|
RU2567698C2 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
Изобретение относится к медицине. Устройство для поддержки руки включает опорную стойку, поворотную раму, опорный элемент для руки и блок натяжителя. Опорная стойка выполнена с закрепленным на ней корпусом с возможностью поворота относительно вертикальной оси опорной стойки. Поворотная рама закреплена в корпусе с возможностью вращения относительно вертикальной оси опорной стойки в горизонтальной плоскости и углового перемещения относительно горизонтальной оси крепления рамы к корпусу в вертикальной плоскости. Рама включает верхний элемент в виде первого рычага, нижний элемент в виде тяги, которые шарнирно соединены с корпусом и с боковым элементом с образованием параллелограмма. Опорный элемент для руки функционально соединен с поворотной рамой через второй рычаг. Второй рычаг выполнен с возможностью поворота относительно вертикальной оси соединения второго рычага с поворотной рамой. Блок натяжителя закреплен в корпусе и включает упругий элемент, связанный с поворотной рамой с возможностью регулировки усилия натяжения упругого элемента для компенсации веса руки. Первый рычаг поворотной рамы выполнен с плечом в виде приводного кронштейна, расположенного с противоположной стороны от горизонтальной оси крепления рамы к основанию. Блок натяжителя расположен с противоположной стороны от поворотной рамы относительно оси опорной стойки. В качестве упругого элемента блока натяжителя использована, по меньшей мере, одна пружина постоянного усилия, свободный конец которой соединен с приводным кронштейном с возможностью регулирования усилия натяжения пружины. Изобретение обеспечивает физиологический диапазон движения руки с максимально возможным постоянным усилием поддержки руки во всем диапазоне перемещения при минимальной инерционности устройства. 17 з.п. ф-лы, 9 ил.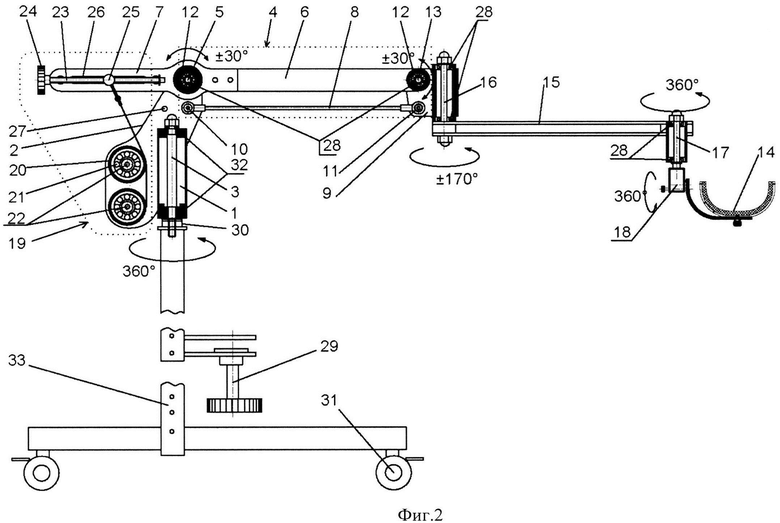
1. Устройство для поддержки руки, включающее
- опорную стойку с закрепленным на ней корпусом с возможностью поворота относительно вертикальной оси опорной стойки, поворотную раму, закрепленную в корпусе с возможностью вращения относительно вертикальной оси опорной стойки в горизонтальной плоскости и углового перемещения относительно горизонтальной оси крепления рамы к корпусу в вертикальной плоскости, при этом рама включает верхний элемент в виде первого рычага, нижний элемент в виде тяги, которые шарнирно соединены с корпусом и с боковым элементом с образованием параллелограмма,
- опорный элемент для руки, функционально соединенный с поворотной рамой через второй рычаг, при этом второй рычаг выполнен с возможностью поворота относительно вертикальной оси соединения второго рычага с поворотной рамой,
- блок натяжителя, закрепленный в корпусе, включающий упругий элемент, связанный с поворотной рамой с возможностью регулировки усилия натяжения упругого элемента для компенсации веса руки;
при этом первый рычаг поворотной рамы выполнен с плечом в виде приводного кронштейна, расположенного с противоположной стороны от горизонтальной оси крепления рамы к основанию, блок натяжителя расположен с противоположной стороны от поворотной рамы относительно оси опорной стойки, при этом в качестве упругого элемента блока натяжителя использована, по меньшей мере, одна пружина постоянного усилия, свободный конец которой соединен с приводным кронштейном с возможностью регулирования усилия натяжения пружины.
2. Устройство по п. 1, отличающееся тем, что корпус выполнен в виде двух плоских металлических пластин, между которыми на горизонтальных осях закреплены пружинные элементы.
3. Устройство по п. 1, отличающееся тем, что в качестве пружин постоянного усилия использованы 2 пружины серии KKF с суммарным усилием 120Н.
4. Устройство по п. 1, отличающееся тем, что приводной кронштейн выполнен из стали, а первый и второй рычаги выполнены из алюминиевых сплавов.
5. Устройство по п. 1, отличающееся тем, что для регулировки усилия натяжения упругого элемента блок натяжителя снабжен размещенным в приводном кронштейне винтом, выполненным с рукояткой и элементом крепления конца упругого элемента с возможностью перемещения по винту и фиксации в выбранном положении, при этом приводной кронштейн снабжен соответствующим пазом для размещения винта с упомянутым элементом, а также шкалой для контроля усилия пружины.
6. Устройство по п. 5, отличающееся тем, что длина паза на приводном кронштейне с размещенным в нем винтом выбрана с обеспечением трехкратного изменения компенсирующего усилия.
7. Устройство по п. 5, отличающееся тем, что начальное положение паза с размещенным в нем винтом выбрано на расстоянии не более 65 мм от горизонтальной оси крепления первого рычага на корпусе, а конечное - не менее 205 мм.
8. Устройство по п. 1, отличающееся тем, что первый рычаг выполнен длиной от 350 мм до 450 мм, при этом блок натяжителя включает два упругих элемента в виде пружин постоянного усилия с суммарным усилием до 12 кг.
9. Устройство по п. 1, отличающееся тем, что перемещение рамы относительно горизонтальной оси крепления рамы к корпусу ограничено углом поворота ±30° от горизонтального положения посредством ограничителя, закрепленного в корпусе.
10. Устройство по п. 1, отличающееся тем, что боковой элемент рамы выполнен в виде кронштейна, на котором закреплена вертикальная ось соединения второго рычага с поворотной рамой.
11. Устройство по п. 1, отличающееся тем, что первый и второй рычаги выполнены длиной, обеспечивающей возможность подведения опорного элемента для руки к опорной стойке.
12. Устройство по п. 1, отличающееся тем, что опорный элемент для руки выполнен с возможностью поворота относительно вертикальной и горизонтальной осей, посредством которых реализовано соединение опорного элемента со вторым рычагом.
13. Устройство по п. 1, отличающееся тем, что опорный элемент для руки снабжен съемными ремнями.
14. Устройство по п. 1, отличающееся тем, что вертикальные оси и горизонтальные оси первого рычага установлены в радиально-упорных подшипниках, при этом оси на концах имеют резьбовой участок для регулировки величины зазоров в радиально-упорных подшипниках.
15. Устройство по п. 1, отличающееся тем, что второй рычаг выполнен с замкнутым профилем поперечного сечения.
16. Устройство по п. 1, отличающееся тем, что опорная стойка выполнена с возможностью крепления на горизонтальной рабочей поверхности или на передвижном основании.
17. Устройство по п. 1, отличающееся тем, что приводной кронштейн выполнен в виде продолжения первого рычага.
18. Устройство по п. 1, отличающееся тем, что опорная стойка выполнена с возможностью изменения высоты с фиксацией выбранного положения.
| US 20130087154 A1, 11.04.2013 | |||
| 0 |
|
SU166673A1 | |
| Устройство для разработки подвижности плечевого сустава | 2017 |
|
RU2653811C1 |
| УСТРОЙСТВО ДЛЯ РАЗРАБОТКИ ДВИЖЕНИЙ В СУСТАВАХ ВЕРХНЕЙ КОНЕЧНОСТИ | 2000 |
|
RU2177295C1 |
| US 6695795 B2, 24.02.2004 | |||
| DE 10101214 C2, 05.12.2002. | |||

