(54) МЕХАНИЗИРОВАННЫЙ ИНСТРУМЕНТ

| название | год | авторы | номер документа |
|---|---|---|---|
| Переносная моторная пила | 1973 |
|
SU447249A1 |
| Переносная моторная пила | 1976 |
|
SU905072A1 |
| Переносная моторная пила | 1978 |
|
SU686869A2 |
| Переносная моторная пила | 1977 |
|
SU642157A1 |
| Мотоинструмент | 1973 |
|
SU460995A1 |
| Переносная моторная пила | 1980 |
|
SU939187A1 |
| Переносная моторная пила | 1977 |
|
SU666078A1 |
| Переносная моторная пила | 1982 |
|
SU1027029A2 |
| Переносная моторная пила | 1975 |
|
SU541665A1 |
| Переносная моторная пила | 1976 |
|
SU648401A1 |

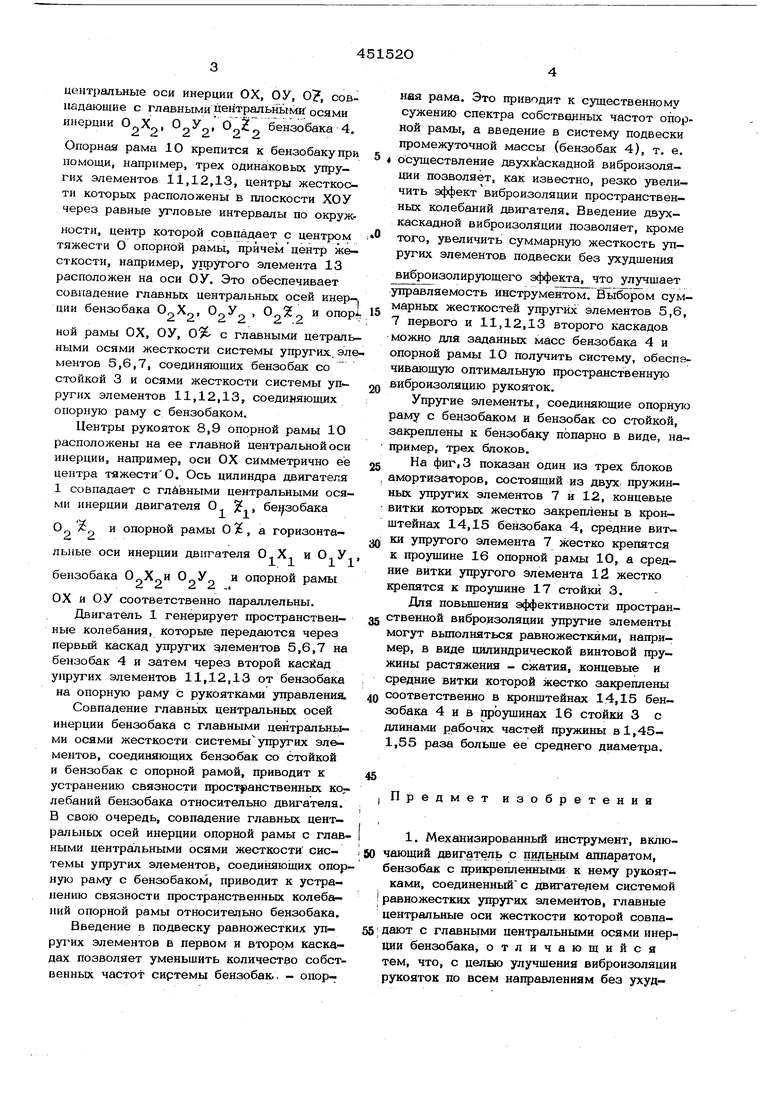
Изобретение относится к ручным меха низированным инструментам, применяемым , например, на валке и раскряжевке древеси. ны в лесной и деревообрабатывающей про-ч мыши енности. Известен механизированный инструментг включающий двигатель с гашьньш аппаратом бензобак с прикрепленными к нему рукоят- ками, соединенный с двигателем системой равножестких упругих элементов, главные центральные оси жесткости которой совпа- дают с главными цёЪ радьньхмЗ осями инер ции бензобака. Однако известные механизированные ин сггрументы не обеспечивают необходимую ви(броизолацгао рукояток по всем направлэ- нням без ухудщения управляемости пильныь| аппара-гом. Цель изобретения улучшение виброизо ЛЯ1ШИ рукояток по всем направлениям без ухудшения управляемости пильным аппаратом. Для этого рукоятки соединены с бенао баксзм системой равножестких упругих элб ментов, главные Центральные оси жесткор /ти которой совмещены с главными цент ральными осями инерции бензобака и руко-. яток. На фиг. 1 изображен механизированный -инструмент, общий вид; на фиг. 2-то же,в плане; на фиг. 3 - схема блока амортизаторов. Двигатель 1 жестко соединен с пильныь аппаратом 2. и стойкой 3 и имеет главные центральные оси инерции О . Бензобак 4 имеет главные центра льные оси инерции , 0„У, 0 ii и крепится К стойке при помощи, например, трех одинаковых упругих элементов 5,6,7, центры жесткости которьк распдлр жш1ы в плоскости через равные угловые интервалы по окружности, центр которой совпадает с центром тяжести О бвнзоба ка; причем, например, центр жесткости упШГ9Е2. Ёй мелта 7,-ЕасшаЦжен на осиО У . -и „.,, 4 рукоятки а жёстко связаны между собой и опорную раму 10, амвющую главные центральные оси инерции ОХ, О У, О, совпадающие с главными центральными осями инерции , Онорная рама 10 крепится к бензобаку при помощи, например, трех одинаковых упругих элементов 11,12,13, центры жесткости которых расположены в плоскости ХОУ через равные угловые интервалы по окружности, центр которой совпадает с центром тяжести О опорной рамы, причемцентр жесткости, например, упругого элемента 13 расположен на оси ОУ. Это обеспечивает совпадение главных центральных осей инерции бензобака , опор ной рамы ОХ, ОУ, 0% с главными цетраль ными осями жесткости системы упругих, эле ментов 5,6,7, соединяющих бензобак со стойкой 3 и осями жесткости системы упругих элементов 11,12,13, соединяющих опорную раму с бензобаком. Центры рукояток 8,9 опорной рамы 10 расположены на ее главной центральной оси инерции, например, оси ОХ симметрично её центра тяжестиО. Ось цилиндра двигателя 1 совпадает с главными центральными осями инерции двигателя О , бе1 зобака 0 и опорной рамы 0;, а горизонтальные оси инерции двигателя О Х и О, У бензобака ОХ„и ОУ и опорной рамы с fi -t ОХ и ОУ соответственно параллельны. Двигатель 1 генерирует пространственные колебания, которые передаются через первый каскад упругих элементов 5,6,7 на бензобак 4 и затем через второй касйад упругих элементов 11,12,13 от бензобака на опорную раму с рукоятками управления. Совпадение главньк центральных осей инерции бензобака с главными центральнььми осями жесткости системы упругих элементов, соединяющих бензобак со стойкой и бензобак с опорной рамой, приводит к устранению связности npociftaHCTBeHHbix колебаний бензобака относительно двигателя. В свою очередь, совпадение главных центральных осей инерции опорной рамы с главными центральными осями жесткости системы упругих элементов, соединяющих опор ную раму с бензобаком, приводит к устранению связности пространственных колеба ПИЙ опорной рамы относительно бензобака. Введение в подвеску равножестких упрутих элементов в первом и втором каскадах позволяет уменьшить количество собственных 4acTot сиртемы бензобак,, - опорная рама. Это приводит к существенному сужению спектра собственных частот опорной рамы, а введение в систему подвески промежуточной массы (бензобак 4), т. е. осуществление двухкаскадной виброизоляции позволяет, как известно, резко увеличить эффект виброизоляции пространственных колебаний двигателя. Введение двухкаскадной виброизоляции позволяет, кроме того, увеличить суммарную жесткость упругих элементов подвески без ухудшения виброизолирующего эффекта, что улучшает управляемость инструментом. Выбором суммарных жесткостей упругих элементов 5,6, 7 первого и 11,12,13 второго каскадов можно для заданных масс бензобака 4 и опорной рамы 1О получить систему, обеспечивающую оптимальную пространственную виброизоляцию рукояток. Упругие элементы, соединяющие опорную раму с бензобаком и бензобак со стойкой, закреплены к бензобаку попарно в виде, например, трех блоков. На фиг, 3 показан один из трех блоков амортизаторов, состоящий из двуХ: пружинных упругих элементов 7 и 12, концевые витки которых жестко закреплены в кронштейнах 14,15 бензобака 4, средние витки упругого элемента 7 жестко крепятся к проушине 16 опорной рамы 10, а средние витки упругого элемента 12 жестко крепятся к проушине 17 стойки 3. Для повышения эффективности пространственной виброизоляции упругие элементы могут вьшолняться равножесткйми, например, в виде цилиндрической винтовой пружины растяжения - сжатия, концевые и средние витки которой жестко закреплены соответственно в кронштейнах 14,15 бензобака 4 и Б проушинах 16 стойки 3 с длинами рабочих частей пружины в 1,45- 1,55 раза больше ее среднего диаметра. Предмет изобретения 1. Механизированный инструмент, включающий двигатель с пвдьным аппаратом, бензобак с прикрепленными к нему рукоятками, соединенный с двигателем системой равножестккх упругих элементов, главные центральные оси жесткости которой совпадают с главными центральными осями инерг ции бензобака, отличающийся тем, что, с целью улучшения виброизоляции рукояток по всем направлениям без ухудшеыйй управляемости п1шь}1Ь1ы аппаратом, pyKosTKii соединены с бензобаком системой раеножестких упругих элементов, главные центральные оси жесткости которой совмещень; с главными центральными осями инерции бензобака и рукояток,
22 2 2.Г
Л
р14г. 1
,
w.j
.2
