I
Изобретение относится к силоизмерительной технике.
Известно устройство для измерения механического импеданса рук оператора, содержащее основание, жесткую раму с рукоятками, соединенную с основанием упругими элементами 1.
Недостатком указанного устройства является то, что оно не позволяет определить значение пространственного механического импеданса при обхвате рукояток руками оператора.
Наиболее близким к предложенному устройству является устройство для измерения механического импеданса рук оператора, содержащее основание, жесткую раму, соединенную с основанием упругими элементами, равномерно распределенными по окружности, центр которой совпадает с центром тяжести рамы, датчики силы и скорости, установленные на раме 2.
Недостатком ук-азанной конструкции является отсутствие регулировки амплитуд ли нейных и угловых колебаний рамы.
Это достигается тем, что основание снабжено тремя кронщтейнами с дуговыми пазами, в которых размещены цилиндрические
втулки, причем середина каждого упругого элемента жестко прикреплена к соответствующей втулке, а его концы соединены с введенной в устройство соответствующей т ягой, которая прикреплена к раме с возможностью поворота и фиксации в плоскости, перпендикулярной плоскости рамы.
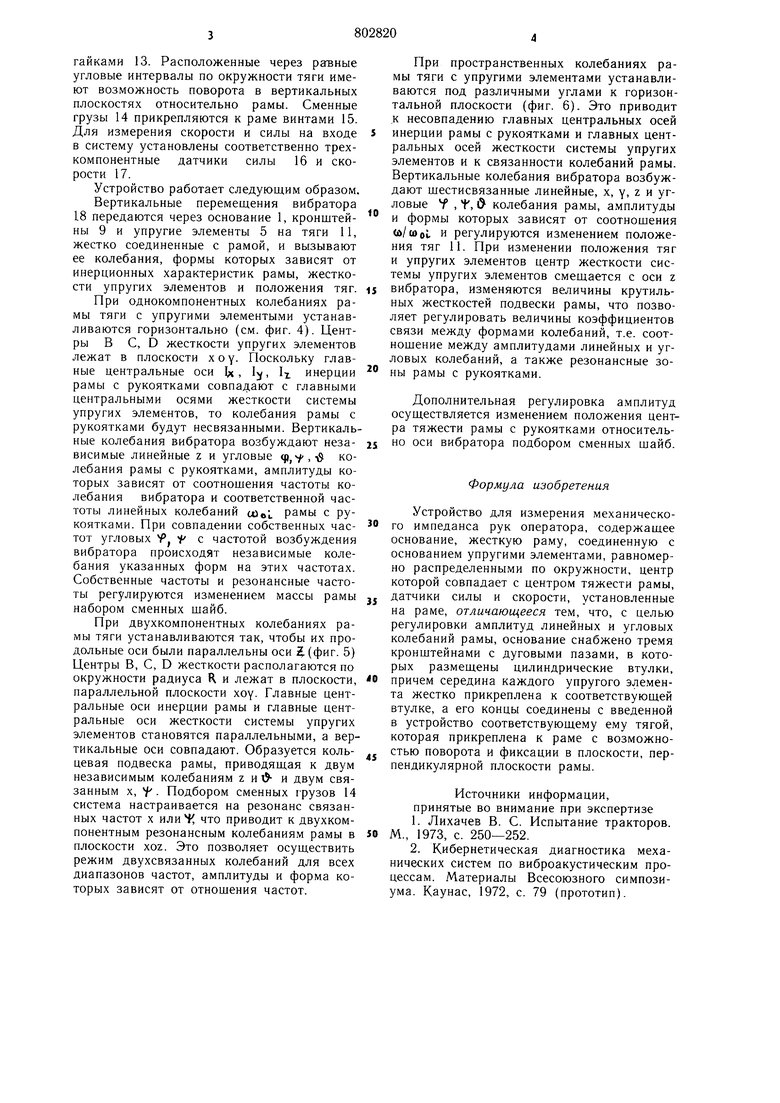
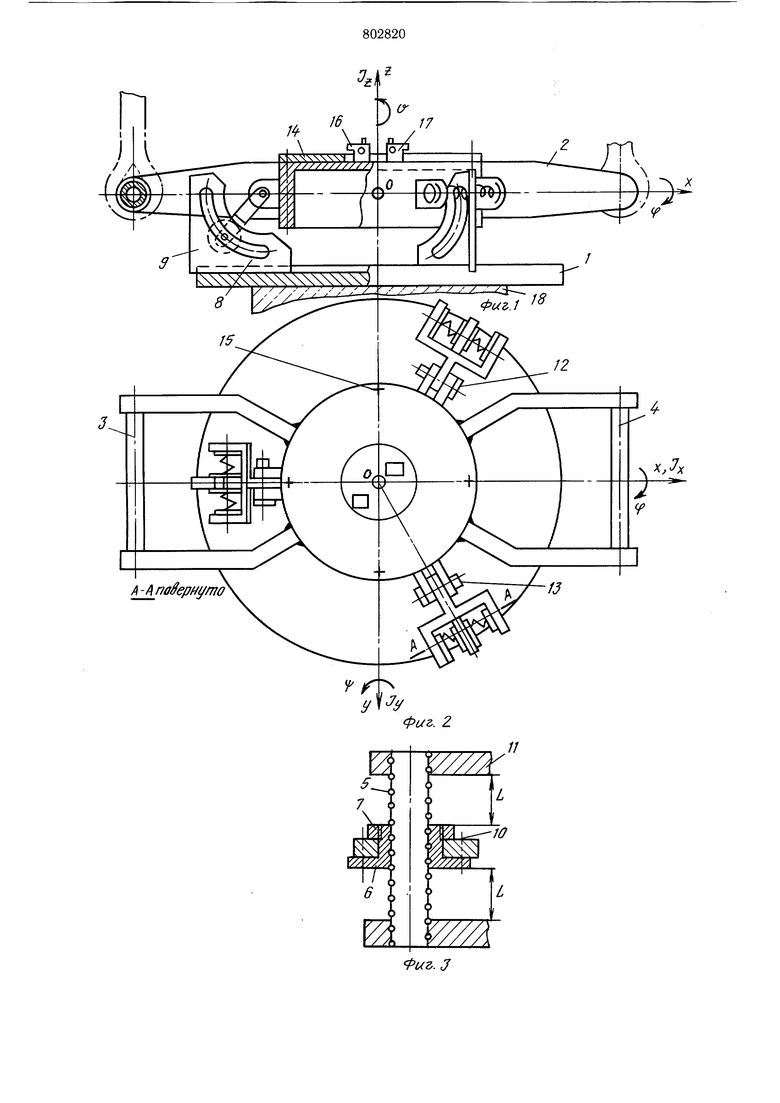
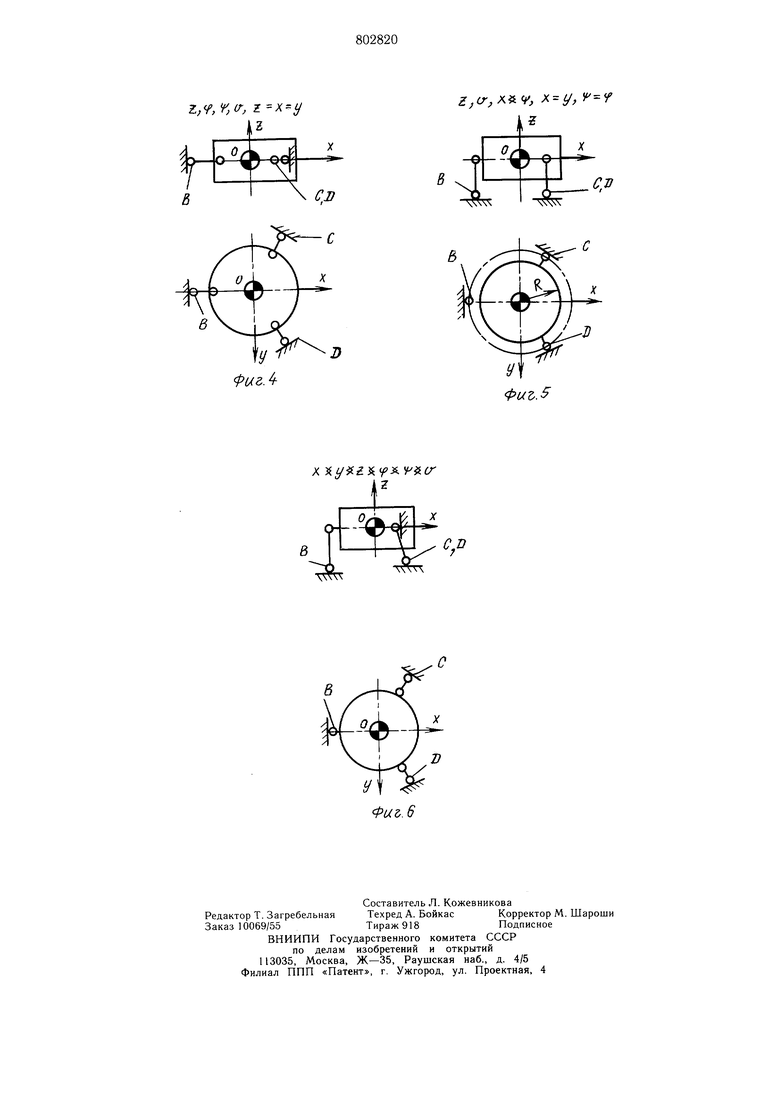
На фиг. 1 изображено предложенное устройство, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - сечение А-А фиг. 2; на фиг. 4, 5, б - схемы расположения тяг и упругих элементов подвески рамы.
Устройство содержит основание 1, жесткую раму 2 с рукоятками 3 и 4, соединенную с основанием тремя равножесткими упругими элементами 5, расположенными равномерно по окружности, центр которой совпадает с центром тяжести рамы. Середины упругих элементов жестко соединены с втулками 6 стопорными гайками 7, помещенными в дуговых пазах 8 кронщтейнов 9 основания 1, фиксируемыми винтами 10, а их крайние витки жестко закреплены в проущинах и соединены тягами 11 с рамой 2. Крайние витки пружин жестко соединены тягами с рамой при помощи одноподвижных шарниров 12, элементы которых стягиваются гайками 13. Расположенные через рагвные угловые интервалы по окружности тяги имеют возможность поворота в вертикальных плоскостях относительно рамы. Сменные грузы 14 прикрепляются к раме винтами 15. Для измерения скорости и силы на входе в систему установлены соответственно трехкомпонентные датчики силы 16 и скорости 17. Устройство работает следующим образом. Вертикальные перемещения вибратора 18 передаются через основание 1, кронштейны 9 и упругие элементы 5 на тяги 11, жестко соединенные с рамой, и вызывают ее колебания, формы которых зависят от инерционных характеристик рамы, жесткости упругих элементов и положения тяг. При однокомпонентных колебаниях рамы тяги с упругими элементыми устанавливаются горизонтально (см. фиг. 4). Центры В С, D жесткости упругих элементов лежат в плоскости хоу. Поскольку главные центральные оси Ь, 1, 1г инерции рамы с рукоятками совпадают с главными центральными осями жесткости системы упругих элементов, то колебания рамы с рукоятками будут несвязанными. Вертикальные колебания вибратора возбуждают независимые линейные z и угловые f,-& колебания рамы с рукоятками, амплитуды которых зависят от соотношения частоты колебания вибратора и соответственной частоты линейных колебаний tOel рамы с рукоятками. При совпадении собственных частот угловых Vj V с частотой возбуждения вибратора происходят независимые колебания указанных форм на этих частотах. Собственные частоты и резонансные частоты регулируются изменением массы рамы набором сменных шайб. При двухкомпонентных колебаниях рамы тяги устанавливаются так, чтобы их продольные оси были параллельны оси Жфиг. 5) Центры В, С, D жесткости располагаются по окружности радиуса R и лежат в плоскости, параллельной плоскости хоу. Главные центральные оси инерции рамы и главные центральные оси жесткости системы упругих элементов становятся параллельными, а вертикальные оси совпадают. Образуется кольцевая подвеска рамы, приводящая к двум независимым колебаниям z и и двум связанным X, . Подбором сменных грузов 14 система настраивается на резонанс связанных частот X что приводит к двухкомпонентным резонансным колебаниям рамы в плоскости XOZ. Это позволяет осуществить режим двухсвязанных колебаний для всех диапазонов частот, амплитуды и форма которых зависят от отношения частот. При пространственных колебаниях рамы тяги с упругими элементами устанавливаются под различными углами к горизонтальной плоскости (фиг. 6). Это приводит к несовпадению главных центральных осей инерции рамы с рукоятками и главных центральных осей жесткости системы упругих элементов и к связанности колебаний рамы. Вертикальные колебания вибратора возбуждают щестисвязанные линейные, х, у, z и угловые V , f, l5 колебания рамы, амплитуды и формы которых зависят от соотношения to/tOfli. и регулируются изменением положения тяг 11. При изменении положения тяг и упругих элементов центр жесткости системы упругих элементов смещается с оси z вибратора, изменяются величины крутильных жесткостей подвески рамы, что позволяет регулировать величины коэффициентов связи между формами колебаний, т.е. соотношение между амплитудами линейных и угловых колебаний, а также резонансные зоны рамы с рукоятками. Дополнительная регулировка амплитуд осуществляется изменением положения центра тяжести рамы с рукоятками относительно оси вибратора подбором сменных шайб. Формула изобретения Устройство для измерения механического импеданса рук оператора, содержащее основание, жесткую раму, соединенную с основанием упругими элементами, равномерно распределенными по окружности, центр которой совпадает с центром тяжести рамы, датчики силы и скорости, установленные на раме, отличающееся тем, что, с целью регулировки амплитуд линейных и угловых колебаний рамы, основание снабжено тремя кронщтейнами с дуговыми пазами, в которых размещены цилиндрические втулки, причем середина каждого упругого элемента жестко прикреплена к соответствующей втулке, а его концы соединены с введенной в устройство соответствующему ему тягой, которая прикреплена к раме с возможностью поворота и фиксации в плоскости, перпендикулярной плоскости рамы. Источники информации, принятые во внимание при экспертизе 1.Лихачев В. С. Испытание тракторов. М., 1973, с. 250-252. 2.Кибернетическая диагностика механических систем по виброакустическим процессам. Материалы Всесоюзного симпозиума. Каунас, 1972, с. 79 (прототип).
,Ч,1Г, ,Z
г,Г,Л«У, Л у, У
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения механического импеданса рук оператора | 1977 |
|
SU684346A1 |
| Кресло для вибротерапии | 1979 |
|
SU1156685A2 |
| Стенд для испытания топливного насоса | 1975 |
|
SU553351A1 |
| Вибростенд | 1974 |
|
SU682782A1 |
| ПЕРЕНОСНАЯ МОТОРНАЯ ПИЛА | 1972 |
|
SU414084A1 |
| Стенд для испытания мотопил | 1983 |
|
SU1107029A1 |
| Кресло для вибротерапии | 1978 |
|
SU1114419A1 |
| Механизированный инструмент | 1973 |
|
SU451520A1 |
| Переносная моторная пила | 1978 |
|
SU686869A2 |
| Переносная моторная пила | 1982 |
|
SU1027029A2 |
X
В
с.и
Фи&.б
