(54) ВИБРАЦИОЬШЫЙ ЛОТОК
| название | год | авторы | номер документа |
|---|---|---|---|
| Вибролотковое загрузочное устройство | 1972 |
|
SU692758A1 |
| Вибрационный конвейер | 1982 |
|
SU1033393A1 |
| Устройство для поштучной подачи предметов | 1990 |
|
SU1791282A1 |
| Электровибратор | 1980 |
|
SU910505A1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2020 |
|
RU2751169C1 |
| Прямолинейный вибропитатель | 1980 |
|
SU990470A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ | 2010 |
|
RU2441714C1 |
| Устройство для вибрационной обработки деталей | 1987 |
|
SU1611705A1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2486017C1 |
| СПОСОБ ВОЗБУЖДЕНИЯ РЕЗОНАНСНЫХ МЕХАНИЧЕСКИХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2410167C1 |
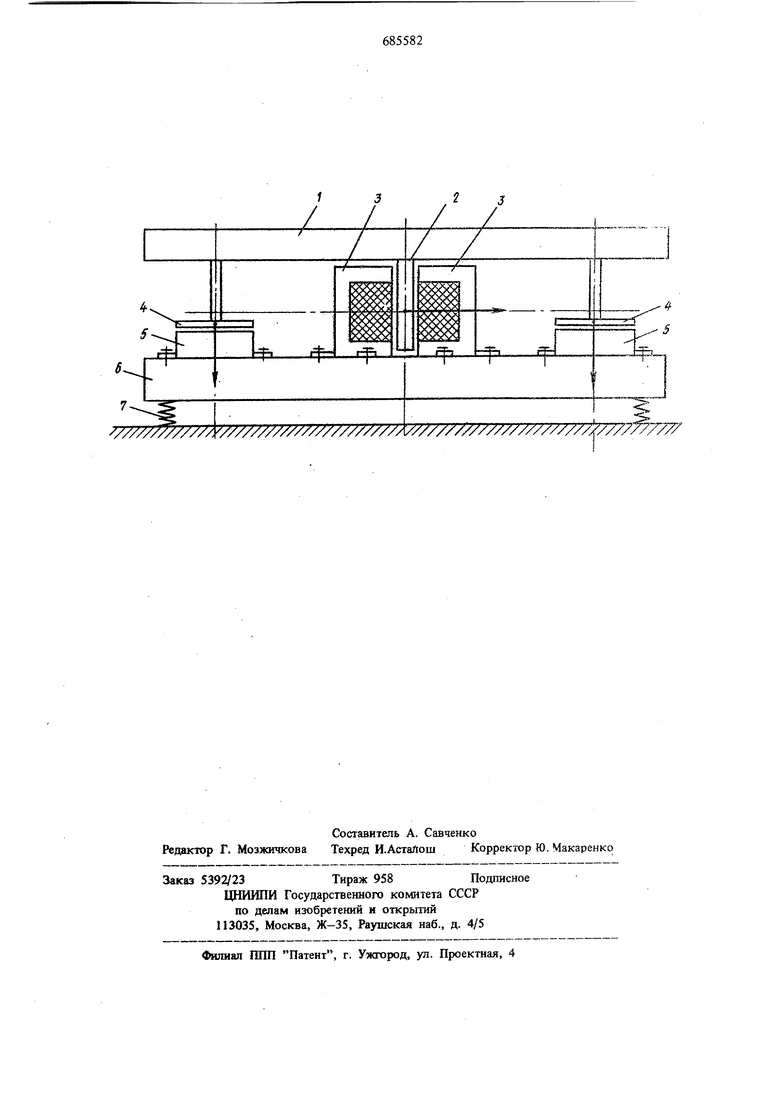
Изобретение относится к вибрационному транспорту и может быть использовано для тран портирования как сьшучих материалов, так и штучных деталей с одаовременным их ориентированием. Известны вибраодонные лотки, рабочий орган которых подвешен на наклонных рессорах. Вертикальная и горизонтальная составляющие амплитуды колебаний в этих вибрационных лотках связаны между собой углом наклона рессор к вертикали 1. Однако по достижении определенных значений вертикальной составляющей амплитуды колебаний начинается интенсивиое подбрасьшшше деталей на транспортирующей поверхности, что приводит к потере ориентации деталей. Недостатком известных вибрационных лотков является также возникновение неуправляемых поворотных колебаний грузонесущего органа (галопирования вокруг центра тяжести колеблющейся системы, при которых резко изменяется вертикальная составляющая амплитуды колебаний по длине лотка, а следовательно, и угол бросаьгия. На различных участках скорость движения материала получается разная, часто BosmiKiuee неуправляемое галощфоваиие ведет к полной потере производительности вибромашины. Наиболее близким техническим pemeinicM к данному изобрете шю является вибрационный лоток, содержащий р&бочкп орган в виде активной массы, связанной посредством пружин с реактивной массой, и вибропр1шоды для создания продольных и вертикальных колебшшй, состояиц1х из якорей, закрепленных на активной массе, и злектромагнитов, закрештеш1ььх на реактивной массе 2. Цель изобретения - обеспечение возможности регулирования режима вибрации лотка путем правлеш1я его галопироваю(ем. Это достигается тем, что вибропривод для соэдшия вертикальных колебаний рабочего органа вьтолнен в виде двух, независимо ттравляемых по фазе и амплитуде, злектромагнитов, расположенных под концами рабочего органа. На чертеже изображена принципиальная схема компоновки основных узлов вибрационного лотка с независимым возбуждением колебатй в двух взаимно, перпендикулярных плоскостях. Вибрационный лоток с раздельным возбуждением колебаний в двух взаимно пернендикулярных плоскостях содержит рабочий орган 1 с закрепленными на нем якорем 2 электромагнитов 3 для возбуждения продольных колебаний и якорями 4 электромагнитов 5 для возбуждения поперечных колебаний. Рабочий орган 1 с закрепленными на нем якорями 2 и 4 образует активную массу. Основание 6 с закрепленными на нем злектромагнигами 3 и 5 образуют реактивную массу. Активная и реактивная массы связаны между собой упругими элементами (на чертеже не показаны). Упругая подвеска должна обеспечить одинаковую жесткость во всех направлениях в плоскости чертежа, поэтому в качестве таких упругих эпеменюв могут быть использованы горизонталь {ые упругие стержни круглого сече1Я1я, изгибная : жесткость которых одинакова во всех направлениях, перпендикулярных их продольньЕМ осям, или витые цилиндрические пружины сжатия, поперечная жесткость которых также одинакова во всех направлениях, перпендикулярных осям пружин. Реактивная масса установлена на амортизационные пружины. 7. При включении злектромагнитов 3 и 5 актив ная масса вибрационного лотк (рабощга орган) начинает колебаться в продольном и вертикальном направлениях с одинаковой частотой. При сложении двух взаимно nepneH iicynHpHbix гармонических колебаний оданаковой частоты могут быть получены эллиптические, круговые или прямолинейные траектории движения точек рабочего органа. JfciH создания направленного виброперемещеHiiH необходимо наличие вертикалышк колебаний рабочего органа с определенным сдвигом по фазе относителыю фазы продольных колебаний. Вклющш оба злектромапшта 5 и варьируя амплитудными значениями возмущающих, усилий, а также на шльными фазами, можно ползчать одинаковую амплитуду поперечных колебаний по всей длине транспортирующего органа (при полном отсутствии галопирования) увеличивающуюся амплитуду поперечных колебаний от одного конца транспортирующего органа к другому, поперечные колебания концов рабочего органа в противофазе - все зто позволяет транспортировать материал либо с равномерной скоростью, либо с ускорением шта замедлением, осуществлять движе1ше материала от концов транспортирующей дорожки к середине или от середиил к концам. Таким образом, при расположении злектромагнитов для возбуждения вертикальных колебаний рабо чего органа под концами лотка и при независи мом регулировании амплитуд и фаз вертикаль ных возмуцдающих усилий появляется возмож 24 кость управлять галопированием рабочего органа вибромашины. Если горизо(тальная составляющая амплитуды колебаний лотка постоянна и одинакова по всей длине лотка, а вертикальная составляющая возрастает от одного конца лотка к другому, то в этом случае детали перемещаются по транспортирующей дорожке либо с ускорением, что приводит к разрознению потока деталей и может быть использовано при счете изделий, сушке, покраске, осмотре, ориентировании, либо с замедлением, что приводит к сведению разрозненного потока деталей в сплошной, например, после вышеуказанных операций. Если центр поворотных колебаний рабочего органа расположен на середине транспортирующей дорожки, то в этом слутае вертикальные составляющие колебаний концов лотка находятся в противофазе и движение материала может быть либо от конца лотка к его середине, что удобно использовать для сведения двух потоков изделий, например от двух обрабатывающих машин, в один, а также при сборке двух деталей, либо от середины лотка к его концам, что позволяет разъединить один поток изделий на два. Если амплитуда вертекальных колебаний транспоршрующей дорожки одинакова по всей длине рабочего (гана, то движение изделий будет равномерным справа налево или слева направо. Формула изобретения Вибрационный лоток, содержащий рабочий орган в виде активной массы, связажюй восредством пружин с реактивной массой, и внброприводы для создания продаяышх и вертикальных колебаний,состояыщх из якорей, закрепленных на активной массе, и элек юяшнитов, закрепленных на реактивной массе, о тличающийся тем, что, с целью обеспечения возмояшости регулирова1а1Я режима вибрации лотка путем управления его галопированием, виброп жвод для создания вертикальных колебаний рабочего органа выполнен в виде двух, независимо управляемых по фазе и амплитуде электромагнитов, расположенных под концами рабочего органа. Источники информации, принятые во внимание при экспертизе 1.Сшшаковский А. О., Гончаревич И. Ф. Вибрационные конвейеры, питатели и вспомогательные устройства. М., Машиностроение, 1972, с. 216, рис. 88. 2.Авторское свидетельство СССР № 205679, кл. В 65 G 27/02, 1964.
У/ /////////У/////////У/У//////////
