Изобретение относится к вибрационной технике и может быть использовано при совершенствовании и создании вибрационных технологических машин.
Обработка поверхностей деталей сложной формы в вибрационных взаимодействиях с сыпучий абразивной или гранулированной средой в последние годы получила распространение во многих производствах: обработка лопаток турбин, корпусов сложной формы, блоков двигателей, валов роторов и др. Основы подобного рода процессов разрабатывались отечественными учеными Бабичевым А.П., Гончаревичем И.Ф., Блехманом И.И., Пановко Г.Я., Копыловым Ю.Р. и др., что нашло отражение в научных публикациях и развивается как одном из современных направлений технологическом базисе современного машиностроения.
Вибрационные технологические процессы реализуются с помощью вибрационных технологических машин, чаще всего такое оборудование создается как вибрационные стенды, обладающие возможностями формирования и управления динамическими состояниями рабочих органов, образующих пространственные формы распределения амплитуд колебаний точек рабочего органа в форме вибрационных полей. Возникающие процессы вибрационных взаимодействий сыпучей (абразивной или гранулированной) среды отличаются сложностью форм, параметрами устойчивых режимов, чередованиями форм контактирования рабочей среды с обрабатываемым объектом, что требует разработки и осуществления способов и средств контроля за вибрационными взаимодействиями, управления их формой, поддержания определенных режимов за счет специальных систем управления.
Коррекция и настройка вибрационных взаимодействий может вестись на основе визуальных методов контроля путем соответствующих корректировок, а также осуществляться с помощью систем автоматического управления, что инициирует поиск и разработку соответствующих подходов, связанных с созданием математических моделей, алгоритмов обработки информации и оценки эффективности управляющих воздействий.
Формирование динамических состояний, создаваемых с помощью управляемых вибраторов и вибровозбудителей, является одним из основных методов настройки. Вместе с тем в последние годы широкое применение получают способы настройки, коррекции, управления и формирования динамических состояний путем введения в механические системы дополнительных связей, возможностей изменения значений некоторых параметров кинематических или динамических взаимодействий. Для реализации настроечных и корректирующих функций, как правило, становится необходимым разработка соответствующих алгоритмов изменения и управления динамическими состояниями. Это требует создания соответствующих математических моделей, построения расчетных схем и формирования определенного методологического базиса, обеспечивающего адекватность расчетных позиций.
В ряде известных технических разработок развиты перспективные подходы, которые инициируют выбор рациональных решений и поиск перспективных новаций.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», 2532235, МПК В06 В1/00, приоритет 27.10.2014], представляющее собой вибрационную транспортирующую машину, включающую рабочий орган, соединенный упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, причем средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений ω=λ1+λ2, λ1=ν⋅ω, 0<ν<1, где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов, λ2=√C/Мпр - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=M1M2/(M1+M2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, М2 - общая масса реактивной части машины. Технический результат - достижение высокой стабильности резонансного режима работы машины при высокой добротности ее колебательной системы, а в итоге создание энергосберегающих вибрационных транспортирующих машин.
К недостаткам данного изобретения можно отнести недостаточно детализированное математическое описание возникающих динамических эффектов, а также сложность системы управления динамическим состоянием вибрационной машины.
Известен способ реализации электромагнитным приводом асимметричного вибрационного движения колебательной механической системы [Крейнин Г.В., Мацеевич Б.В., Михайлов В.Д., Сериков В.В., Ушанков А.Е., Янбулатов Р.И. «Устройство управления вибрационным полем технологической машины», 2091183, МПК В06В 1/04, приоритет 27.08.1997], заключающийся в обеспечении режима разгона якоря, закрепленного на подвижной части колебательной механической системы, до заданного максимального значения амплитуды колебаний за счет формирования импульсов силы статором, закрепленным на неподвижной части колебательной механической системы, повторении режима разгона при падении амплитуды колебаний до заданного минимального значения, причем направление действия импульсов силы при режиме разгона совпадает с направлением движения якоря, отличающийся тем, что вибрационное движение осуществляют в режимах разгона, торможения, квазиразгона и квазиторможения, комбинируя или чередуя эти режимы, а импульсы силы формируют отталкивающими якорь от статора при любых режимах работы, причем падение амплитуды колебаний якоря до заданного минимального значения обеспечивают в тормозном режиме работы за счет формирования импульсов силы с направлением действия, противоположным направлению движения якоря или в квазитормозном режиме за счет формирования импульсов силы, направление действия которых в большую часть времени действия противоположно и в меньшую совпадает с направлением движения якоря, а в режиме квазиразгона формируют импульсы силы, направление действия которых в меньшую часть времени действия противоположно, а в большую совпадает с направлением движения якоря, переключаясь на режимы торможения или квазиторможения при достижении заданного максимального значения амплитуды колебания якоря.
Недостатками данного аналога являются отсутствие математической модели, поясняющей физическую природу возникающих динамических эффектов, а также сложность изменения динамического состояния вибрационной машины.
Известна устройство вибрационная установка для предпосевной обработки семян [Серга Г.В., Резниченко С.М. «Вибрационная установка для предпосевной обработки семян», 2580152, МПК А01С 1/00, приоритет 10.03.2016], содержащая шлифовальный барабан с разгрузочным окном, бункер-дозатор, выгрузной лоток, установленные упруго на основании. Шлифовальный барабан изготовлен коническим, установлен жестко горизонтально и смонтирован из трех или более полос трапециевидной формы с разными размерами по ширине, с увеличением их по длине, на которых попеременно с их противоположных сторон под углом 60° к оси полос выполнены посредством фрезерования или обработкой давлением зоны ослабленного сечения в виде надрезов со скошенными стенками, для образования по периметру конического винтового шлифовального барабана многогранных поверхностей из поочередно расположенных своими боковыми сторонами треугольников. При этом полосы скручены в продольном направлении относительно своих продольных осей и изогнуты в поперечном направлении по винтовой линии на конической оправке, с образованием по периметру винтового шлифовального барабана трех и более винтовых линий и винтовых поверхностей основного и противоположного направлений с переменным, увеличивающимся шагом винтовых линий. Устройство позволяет упростить конструкцию и расширить его технологические возможности.
Основным недостатком данного изобретения является сложность контроля динамического состояния вибрационной технологической машины. Также отсутствует математическое описание.
За прототип принимается устройство для вибрационной абразивной обработки цилиндрических деталей [Матегорин Н.В., Бабичев А.П., Мотренко П.Д., Чумаченко Г.В. «Устройство для вибрационной абразивной обработки цилиндрических деталей», 74333, МПК В24В 31/067, приоритет 27.06.2008], содержащее основание, на котором посредством пружин установлен контейнер с инерционным вибратором, снабженный средствами для загрузки и выгрузки деталей, внутри контейнера установлено средство для транспортировки деталей в процессе абразивной обработки, содержащее поярусно установленные друг под другом транспортные каналы, отличающееся тем, что средство для транспортировки деталей в процессе абразивной обработки содержит, по крайней мере, два съемных параллельных и наклонных к горизонтальной плоскости рабочих транспортных лотка, выполненных в форме прямоугольного желоба, дно которого снабжено абразивным покрытием, между рабочими транспортными лотками установлен транспортный лоток, имеющий угол наклона к горизонтальной плоскости в сторону, противоположную наклону рабочего транспортного лотка, а каждый рабочий транспортный лоток соединен с системами подачи и отвода смазочно-охлаждающей жидкости (СОЖ).
К основным недостаткам прототипа можно отнести сложность управления системой параметров жесткости, а также выбор оптимального положения дополнительной связи.
Задачей предлагаемого изобретения является управление динамическим состоянием вибрационной технологической машины при помощи регулирования передаточного отношения рычажной связи, соединяющей дополнительные массо-инерционные элементы.
Устройство управления динамическим состоянием вибрационной технологической машины, представляющее собой систему, состоящую из рабочего органа, установленного на опорной поверхности и соединенного с ней через упругие элементы, содержащее поворотный шарнир, соединенный с рычажным механизмом, датчики, установленные по обе стороны рабочего стола, и массо-инерционные элементы, опирающиеся на упругие элементы, соединенные рычажным механизмом, отличающееся тем, что поворотный шарнир установлен на ложементе с возможностью перемещения посредством приводов, на которые установлены блоки их управления, рычажный механизм с изменяемыми плечами, обеспечивает получение требуемого вибрационного режима.
Суть изобретения поясняется чертежами.
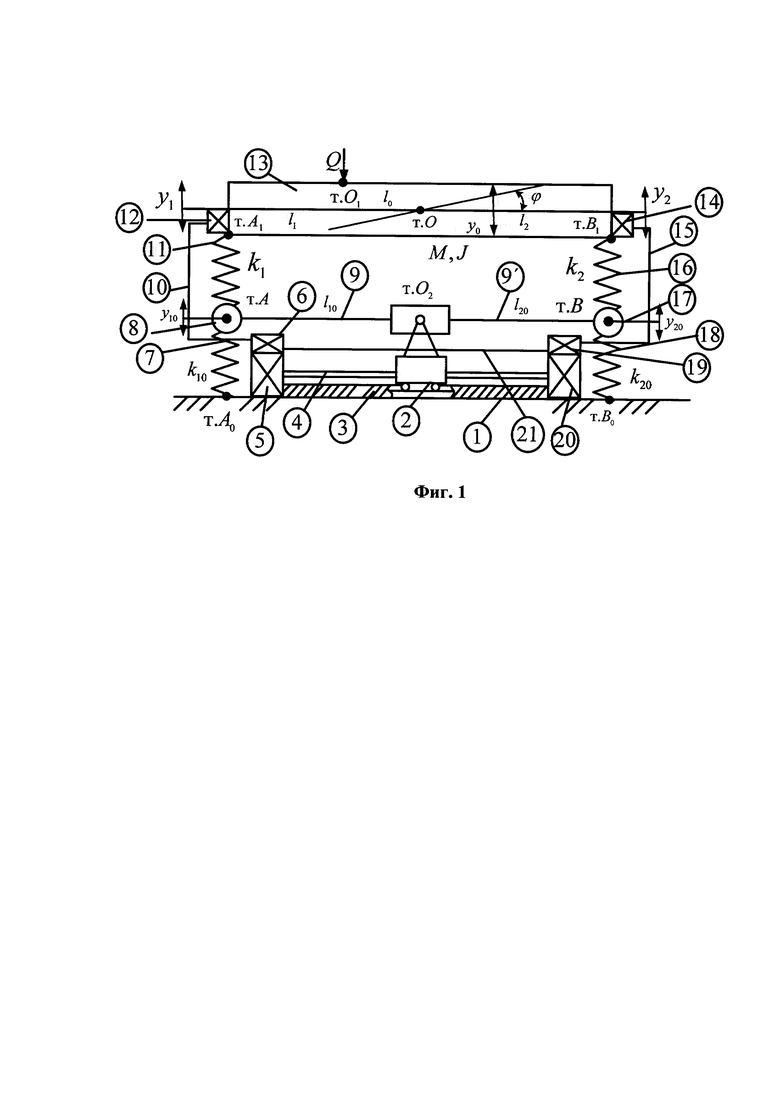
На фиг. 1 приведена принципиальная схема вибрационной технологической машины с упруго-рычажным устройством для управления динамическим состоянием рабочего органа, содержащая опорную поверхность 1, поворотный шарнир 2, ложемент 3, ходовой винт 4, приводы 5, 20, блоки обработки информации и управления приводами 6, 19, упругие элементы 7, 11, 16, 18, массо-инерционные элементы 8, 17, плечи рычажного механизма 9, 9', коммуникационные каналы связи 10, 15, 21, рабочий орган 13, датчики виброизмерительного типа 12 и 14.
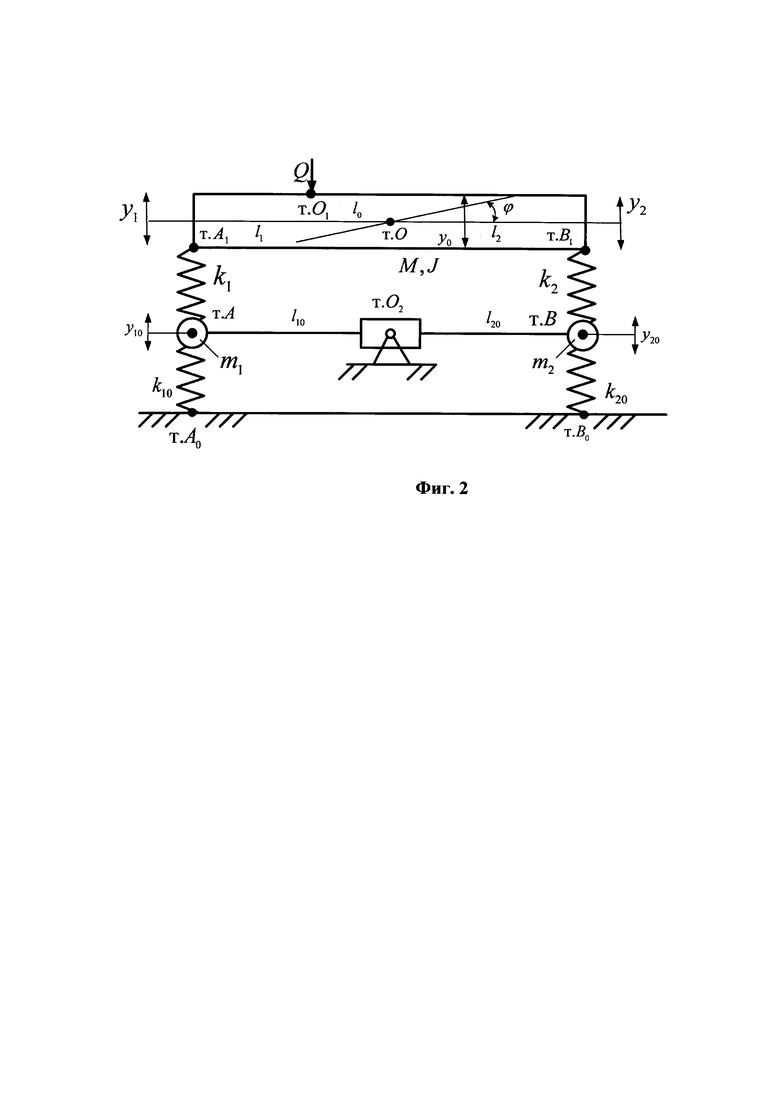
Фиг. 2 иллюстрирует расчетную схему исходной вибрационной технологической машины в виде механической колебательной системы.
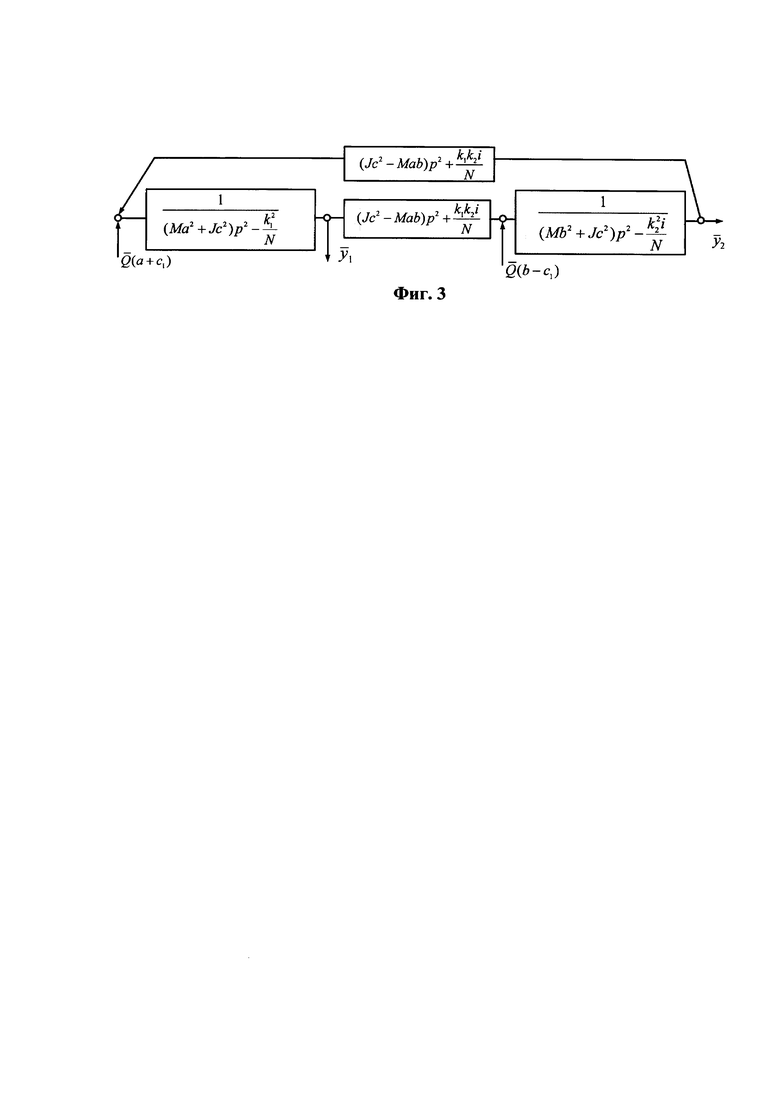
На фиг. 3 показана структурная схема эквивалентной в динамическом отношении системы автоматического управления.
Изобретение работает следующим образом.
Физическая модель вибрационной машины, реализующей предлагаемое устройство настройки, коррекции и формирования динамического состояния рабочего органа представляет собой механическую колебательную систему с тремя степенями свободы. Движение системы описывается координатами γ1, γ2, γ10 и γ20. Последняя связана через рычажный механизм с координатой γ10 через соотношение γ20=γ10i1, где 

 - длины плеч рычагов рычажного механизма 9, 9'.
- длины плеч рычагов рычажного механизма 9, 9'.
Механическая колебательная система (фиг. 1) содержит рабочий орган 13 (твердое тело массой Ми моментом инерции J относительно центра масс - т. О). Возбуждение колебаний системы производится вибровозбудителем гармонического типа (показано в виде силы Q, приложенной в т.О). Точка О1 смещена от т. О на плечо  Центр масс системы (т. О) размещен на расстояниях
Центр масс системы (т. О) размещен на расстояниях  от концов твердого тела (тт. А1, В1) соответственно.
от концов твердого тела (тт. А1, В1) соответственно.
Рабочий орган 13 в т. А1, В1 опирается на упругие элементы 11 и 16, имеющие коэффициенты жесткости k1 и k2. Система имеет встроенный рычажный механизм (плечи 9, 9'), который имеет соединение с поворотным шарниром 2, имеющим возможность перемещения по направляющим (ложемент 3, имеющий соединение типа «ласточкин хвост»). Поворотный шарнир 2 может перемещаться по ложементу с помощью ходового винта 4, что обеспечивает изменение передаточного отношения рычага  Ходовой винт 4 приводится в движение от приводов 5 или 19 (один из них резервный).
Ходовой винт 4 приводится в движение от приводов 5 или 19 (один из них резервный).
Механическая колебательная система имеет также дополнительные массо-инерционные элементы 8, 17 с массами m1 и m2 соответственно, опирающиеся на соединенные с опорной поверхностью 1 в т. A0 и B0 упругие элементы 7, 18 с коэффициентами жесткости k10 и k20 соответственно. Динамическое состояние рабочего органа оценивается датчиками виброизмерительного типа 12 и 14, которые передают информационные сигналы через коммуникационные каналы связи 10, 15, 21 в блоки обработки информации и управления приводами 6, 20.
Параметры системы для реализации технологического режима рассчитываются предварительно, система запускается в работу; параметры динамического состояния контролируются датчиками и блоками управления. В случае необходимости приводы в движение поворотный шарнир 2, что изменяет передаточное отношение i и вносит соответствующие коррекции в формировании вибрационного поля.
Теоретическое обоснование
1. Для построения математической модели в координатах γ1, γ2, γ10 используется технология, основанная на применениях уравнений Лагранжа 2-го рода с учетом специфики построения, характерной для методов структурного математического моделирования в соответствии с [1]. Для описания движения используется система координат γ1, γ2, γ10, связанная с неподвижным базисом. В расчетах используются следующие соотношения:

где 
Рабочий орган рассматривается как твердое тело, обладающее массой М и моментом инерции J, совершающее плоское колебательное движение. Центр масс твердого тела расположен в точке О (фиг. 1), внешнее возбуждение в виде моногармонической силы Q приложено в т. О1 (фиг. 1) на расстоянии  от центра масс (т. О фиг. 2).
от центра масс (т. О фиг. 2).
В целом, расчетная схема (фиг. 2) технического объекта представляет собой механическую колебательную систему с сосредоточенными параметрами с тремя степенями свободы. В структуре системы используется рычажный механизм, обеспечивающий перемещение дополнительных пригрузов m1 и m2 на концах элементов рычажного механизма в тт. А, В. Рычажный механизм имеет центр вращения в т. O2, который может изменять свое положение и соответственно варьировать значение передаточного отношения

где  - размеры плеч рычажного механизма 2 -го рода [2].
- размеры плеч рычажного механизма 2 -го рода [2].
Наличие передаточного отношения i предопределяет связь между координатами γ10 и γ20 в соответствии с текущем значением.

Предполагается, что механическая колебательная система (фиг. 2) совершает под действием внешнего возмущения Q малые колебания относительно положения статического равновесия.
Выражения для кинетической и потенциальной энергий в рассматриваемом случае имеют вид


Используя соотношения (1), запишем (4), (5) в виде


Используя методические приемы, изложенные в [1], получим во временной области следующие дифференциальные уравнения



После преобразований Лапласа при нулевых начальных условиях система уравнений (8)-(10) в операторной форме может быть представлена в виде:



В уравнениях (11)-(13) принимается, что р = jω является комплексной переменной, значок <-> над переменной означает ее изображение по Лапласу [3, 4].
2. В полученной системе уравнений (11)-(13) можно исключить переменную γ10, приняв, что

где 
С учетом (14) системе уравнений (11)-(13) может быть приведена к
виду


Структурная схема (или структурная математическая модель) системы приводится на фиг. 3.
Структурная схема (фиг. 3) отображает особенности системы, которые заключаются в том, что в системе координат  внешнее воздействие распределяется по двум входам и действует одновременно. Упругие связи и связи между парциальными блоками носят специфический характер.
внешнее воздействие распределяется по двум входам и действует одновременно. Упругие связи и связи между парциальными блоками носят специфический характер.
Для оценки динамических свойств системы может быть использована передаточная функция межпарциальных связей
где N(p) определяется выражением (15).
Передаточная функция (18) дает возможность получать при заданных параметрах амплитудно-частотные и фазово-частотные характеристики, которые могут быть использованы для разработки технологии формирования и поддержания необходимых параметров и структуры вибрационных полей рабочего органа.
В частности, передаточная функция (18) при больших частотах иметь в виду амплитудно-частотную характеристику, имеют предел

Особенностью системы является то обстоятельство, что возможным становится получение эффектов, связанных с «обнулением» межпарциальных связей. В этом случае возможны специфические режимы автономного воздействия на входные процессы системы при ситуации, когда динамические связи между парциальными блоками «отключаются».
Выражение (18) (передаточная функция межпарциальных связей) может рассматриваться как коэффициент связности, отражающий особенности распределения амплитуд колебаний точек рабочего органа (или твердого тела М, J) по его длине. В частности, и числитель и знаменатель выражения (17) являются биквадратными уравнениями, из которых следует, что по каждой из координат  и
и  могут быть созданы режимы динамического гашения колебаний, когда
могут быть созданы режимы динамического гашения колебаний, когда  или
или  . В этих случаях распределение амплитуд колебаний по длине рабочего органа будет происходить линейно (по закону треугольника). В упомянутых случаях центр вращения (узел колебаний) твердого тела будет совпадать с тт. А1 или В1. При коэффициенте связности, равном +1, рабочий орган совершает только поступательные вертикальные колебания при отсутствии угловых движений. В свою очередь, при коэффициенте связности, равном -1, центр вращения (узел колебаний) будет находиться в точке, совпадающей с серединой твердого тела. Коэффициент связности может принимать и другие значения, не совпадающие с 0 или -1. В этих случаях центр вращения (узел колебаний) может находиться за пределами рабочего органа; в свою очередь, движение твердого тела будет происходить как вращение относительно узла колебаний, что соответствует распределению амплитуд колебаний по длине рабочего органа. Отметим, что при одновременном «обнулении» на одной частоте числителя и знаменателя в системе могут возникать и специфические динамические режимы.
. В этих случаях распределение амплитуд колебаний по длине рабочего органа будет происходить линейно (по закону треугольника). В упомянутых случаях центр вращения (узел колебаний) твердого тела будет совпадать с тт. А1 или В1. При коэффициенте связности, равном +1, рабочий орган совершает только поступательные вертикальные колебания при отсутствии угловых движений. В свою очередь, при коэффициенте связности, равном -1, центр вращения (узел колебаний) будет находиться в точке, совпадающей с серединой твердого тела. Коэффициент связности может принимать и другие значения, не совпадающие с 0 или -1. В этих случаях центр вращения (узел колебаний) может находиться за пределами рабочего органа; в свою очередь, движение твердого тела будет происходить как вращение относительно узла колебаний, что соответствует распределению амплитуд колебаний по длине рабочего органа. Отметим, что при одновременном «обнулении» на одной частоте числителя и знаменателя в системе могут возникать и специфические динамические режимы.
Таким образом, наличие соотношений для коэффициента связности может рассматриваться как алгоритмическая основа для обеспечения работы системы коррекции, настройки, управления и формирования динамических состояний вибрационной технологической машины. При разработке математических моделей использовались методы структурного математического моделирования [3, 4]. Приведенная на фиг. 3 структурная математическая модель технического объекта может быть также использована (через характеристическое частотное уравнение) для определения частот собственных колебаний (в данном случае таких частот может быть три).
Список использованных источников
1. Елисеев С.В. Динамический синтез в обобщенных задачах виброзащиты и виброизоляции технических объектов / С.В. Елисеев, Ю.Н. Резник, А.П. Хоменко, А.А. Засядко. - Иркутск: изд-во ИГУ, 2008. - 523 с.
2. Крейнин П.Г. Справочник по механизмам. - М.: Машиностроение. 1986. - 512 с.
3. Елисеев С.В. Прикладной системный анализ и структурное математическое моделирование / С.В. Елисеев. - Иркутск: ИрГУПС, 2018. - 692 с.
4. Елисеев А.В., Кузнецов Н.К., Московских А.О. Динамики машин. Системные представления, структурные схемы и связи элементов. Москва: Инновационное машиностроение, 2019. 381 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство управления динамическим состоянием вибрационной технологической машины | 2019 |
|
RU2734839C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| Способ управления формированием структуры и параметров вибрационного поля технологической машины | 2018 |
|
RU2691646C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Способ корректировки распределения амплитуд колебаний рабочего органа вибрационного технологического стенда и устройство для его реализации | 2018 |
|
RU2716368C1 |
Изобретение относится к вибрационной технике и может быть использовано при совершенствовании и создании вибрационных технологических машин. Особенностью изобретения является введение в структуру системы дополнительных динамических связей, что реализуется на основе рычажного механизма, отличающегося возможностями изменять массо-инерционные и упругие характеристики системы в целом, что достигается путем соответствующих изменений передаточного отношения рычажного механизма, достигаемого с помощью передвижения узла вращения рычага ходовыми винтами, приводимыми в действие приводами, расположенными на опорной поверхности и управляемыми с помощью информации, получаемой от вибродатчиков, установленных на рабочем органе. Устройство может быть реализовано и эксплуатироваться в автоматическом режиме, а также в технологиях предварительной ручной технологической настройки. Изобретение обеспечивает управление динамическим состоянием вибрационной технологической машины при помощи регулирования передаточного отношения рычажной связи, соединяющей дополнительные массо-инерционные элементы. 3 ил.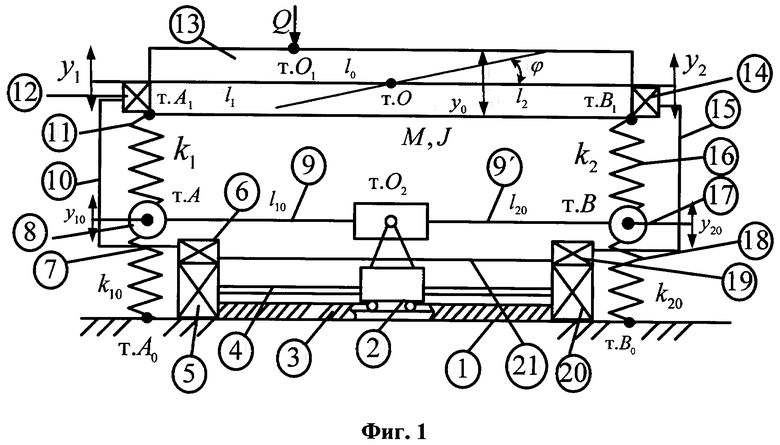
Устройство управления динамическим состоянием вибрационной технологической машины, представляющее собой систему, состоящую из рабочего органа, установленного на опорной поверхности и соединенного с ней через упругие элементы, содержащее поворотный шарнир, соединенный с рычажным механизмом, датчики, установленные по обе стороны рабочего стола, и массо-инерционные элементы, опирающиеся на упругие элементы, соединенные рычажным механизмом, отличающееся тем, что поворотный шарнир установлен на ложементе с возможностью перемещения посредством приводов, на которые установлены блоки их управления, рычажный механизм с изменяемыми плечами, что обеспечивает получение требуемого вибрационного режима.
| Способ и устройство одновременного динамического гашения колебаний объекта защиты по двум степенями свободы | 2017 |
|
RU2700942C1 |
| Способ управления динамическим состоянием технологической вибрационной машины и устройство для его осуществления | 2018 |
|
RU2711832C1 |
| Устройство для измерений быстроменяющихся давлений | 1947 |
|
SU74333A1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДИНАМИЧЕСКИМ СОСТОЯНИЕМ ВИБРАЦИОННОЙ ТЕХНОЛОГИЧЕСКОЙ МАШИНЫ | 2017 |
|
RU2693711C2 |

