(54) ВИБРОЛОТКОВОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО
ной оси рабочей массы, с последующей их фиксацией.
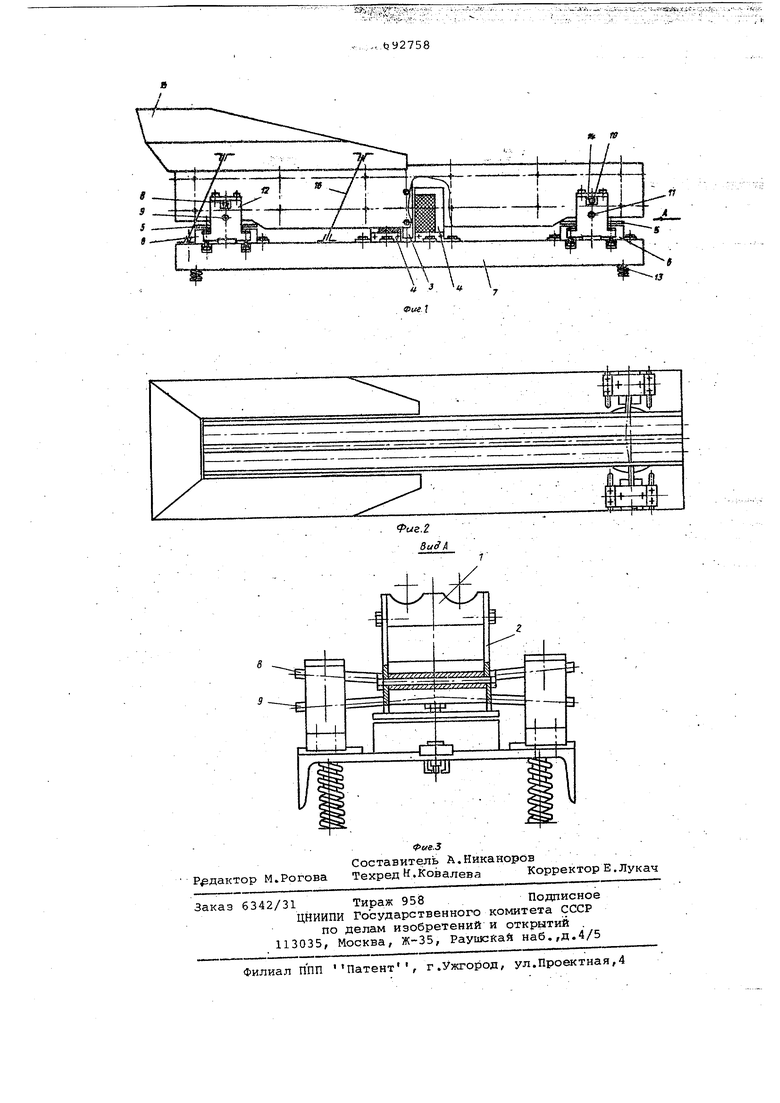
На фиг, 1 изображено вибролотковое загрузочное устройство, общий Вид; на фиг. 2 - то же, в плане на фиг. 3 - вид по стрелке А на фиг. 1.
Конструкция вибролоткового загрузочного устройства содержит желоб 1, укрепленный,на жесткой раме 2, к которой крепится якорь 3 электромагнитов 4 для возбуждения продольных колебаний и якорь 5 электромагнитов б для возбуждения поперечных колебаний. Желоб 1, жесткая рама 2 и укрепленные на ней якорь 3 и 5 образуют рабочую массу.
Рабочая масса связана с основанием 7 поср едством четырех горизонтальных, перпендикулярных продольной оси вибролотка.стержневых пружин 8, 9, 10 и 11, круглого сечения, середины которых защемлены в рабочей массе, а концы свободно лежат на стойках 12, укрепленных на основании 7. . Электромагнит 4 для возбуждения продольных колебаний и электрсмагнит 6 для возбуждения поперечных колебаний также жестко связаны с основанием 7 которое установлено на амрртизацион. ных пружинах 13.Основание 7, укрепленные на нем электромагниты 4 и б и стойки 12 образуют реактивную массу.
Стойки 12 можно перемещать в направлении, перпендикулярном продольной оси вибролотка, и фиксировать в новом положении на основании 7 с помощьк) крепежных болтов. Таким образом меняется рабочая длина стержневых пружин В, 9, 10 и 11,. а следовательно, и их жесткость. Верх ние пружины 8 и 10 опираются на сухарики 14, которьае при наладке могу перемещаться относительно стоек 12, в результате чего создается возможность регулировать в достаточных пределах жесткость каждой из четыре стержневых пружин, Независимо друг от друга.
Пружины 8 и 9,. а также 10 и 11 между собой поджаты в вертикальной плоскости, а пары пружин 8, 9 и 10 ,11 между собой поджаты в горизонтальной плоскости так, что при работе устройства зазоры в точках контактаконцов пружин с опорными стаканами 12 не раскрываются. Вункер 15 устанавливается на основание 7 посредством наклонных рессор 16 так, что дном его является .окелоб 1 вибролотка.
Вибролоток входит в вырез дна . бункера с зазором так, что при рабо они между собой не контактируют. При питании злектромагнитов 4 пульсирующим током по двухтактной схеме возбуждаются продольные колебания рабочей массы, а при питании параллельно обоих электромагнитов 6 возбуждаются поперечные колебания рабочей массы. Сложение этих двух колебаний с определенные соотношением амплитуд и фазовым углом сдвига между ними создает направленную вибрацию рабочей массы, за счет которой и происходит транспортирование деталей по желобу 1 лотка. Реактивна масса также начинает колебаться, но амплитуда ее колебаний в продольном и поперечном направлениях зависит от жесткости амортизационных пружин. 13 и от соотношения рабочей и реактивной масс. Бункер 15 также начинает колебаться за счет передачи колебаний через рессоры 16 от реактивной массы, при этом направление колебаний бункера зависит от угла наклона рессор к основанию.
Таким образом, масса заготовок, находящаяся в бункере, получает подготовительное для захвата движет ние, а движение лотка и бункера относительно друг друга способствует повшению вероятности захвата деталей дорожкой лотка и, в конечном итоге, повышает производительность .устройства. Вес массы заготовок, находящихся в бункере, воспринимается дном и стенками бункера и лишь небольшая довольно постоянная часть веса заготовок воспринимается желобо лотка, что и обеспечивает стабильный режим вибраций активной массы.
Формула, изобретения , Вибролотковое загрузочное устройство с независимыми продольными и поперечными колебаниями рабочего органа, приводимого в движение вибраторами, содержащее бункер и рабочую массу, установленные на реактивной массе, отличающееся тем, что, с целью повышения производительности и стабилизации работы устройства,, бункер установлен на реактивной массе с возможностью колебания относительного рабочего органа, а связь рабочей массы с реактивн выполнена посредством горизонтальньк перпендикулярных к,продольной оси рабочей массы стержневых пружин, середина которых защемлена в рабочей массе,.а концы свободно лежат на стоках реактивной массы, которые установлены с возможностью перемещения в направлении, перпендикулярном продольной оси рабочей массы, с последующей их фиксацией..
Источники информации, принятые во внимание при экспертизе
1. Кожев.ников С.Н. и др. Механизмы.-М.: Машиностроение, 1965, с.840 рис. 11.31, а,г,д.
2. Маринченко B.C. Механизация и автоматизация производства, № 7, 1969, с. 12 (прототип).

| название | год | авторы | номер документа |
|---|---|---|---|
| Вибрационный лоток | 1978 |
|
SU685582A1 |
| Вибролотковое загрузочное устройство | 1975 |
|
SU515623A1 |
| Вибрационное загрузочное устройство | 1982 |
|
SU1066777A1 |
| Вибрационное бункерное загрузочное устройство | 1980 |
|
SU899418A1 |
| Дозирующее вибрационное загрузочное устройство | 1987 |
|
SU1521665A1 |
| ВИБРАЦИОННЫЙ ЛОТОК | 1973 |
|
SU378365A1 |
| Электромеханический вибратор | 1989 |
|
SU1748882A2 |
| ВИБРАЦИОННЫЙ ЛОТОК | 1968 |
|
SU213673A1 |
| Вибрационный бункерный питатель | 1989 |
|
SU1640067A1 |
| Вибрационное загрузочное устройство | 1985 |
|
SU1447729A1 |