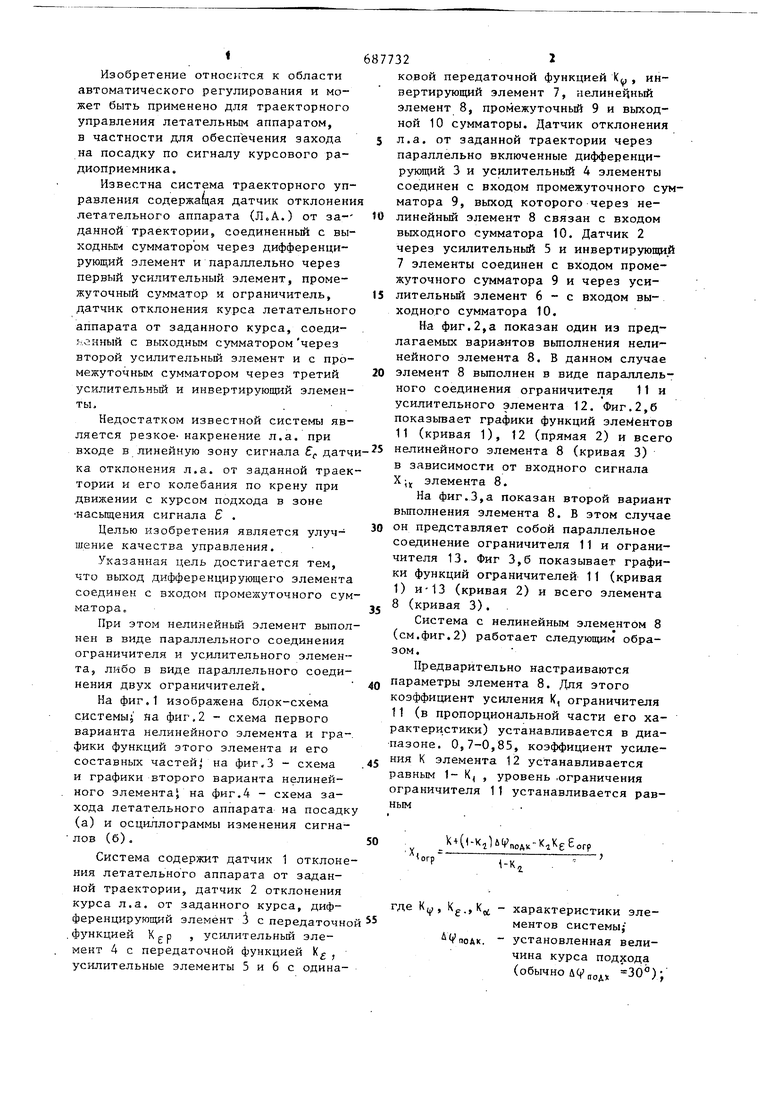
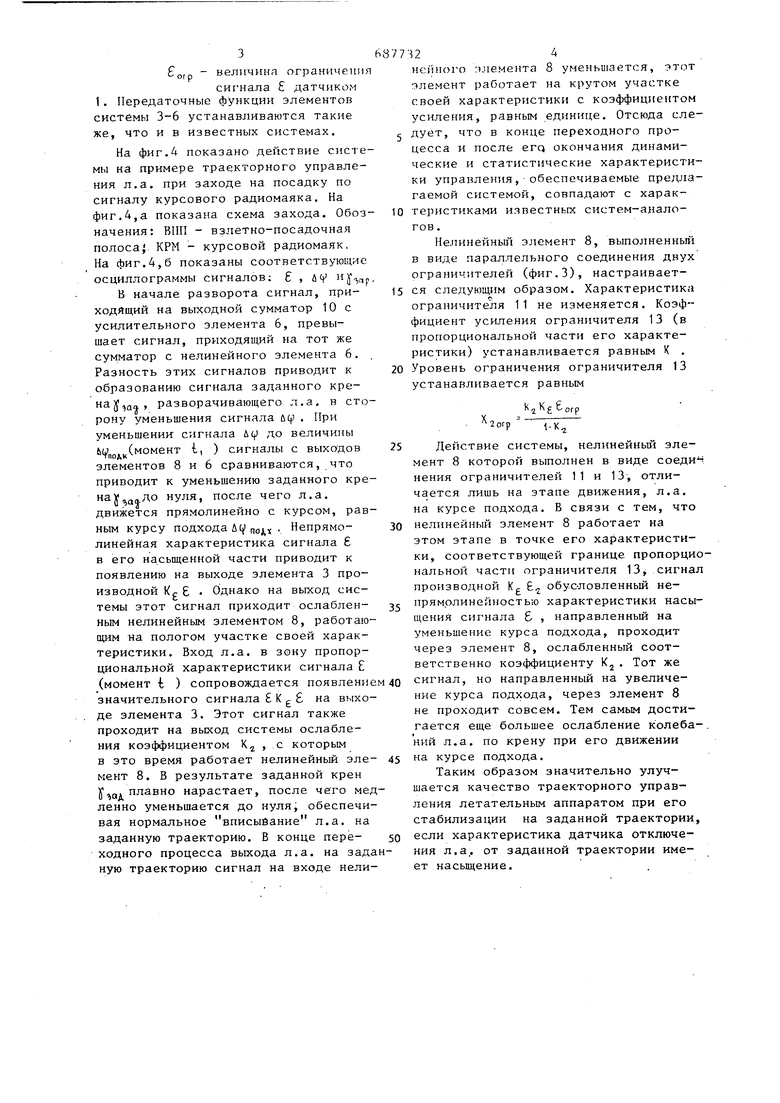
Изобретение относится к области автоматического регулирования и может быть применено для траекторного управления летательным аппаратом, в частности для обеспечения захода на посадку по сигналу курсового радиоприемника . Известна система траекторного управления содержащая датчик отклонени летательного аппарата (Л.А.) от за-данной траектории,, соединенньй с выходньЕ сумматором через дифференцирующий элемент и параллельно через первый усилительный элемент, промежуточный су {матор и ограничитель, датчик отклонения курса летательного аппарата от заданного курса, соедиь,:нный с выходным сумматором через второй усилительный элемент и с промежуточным сумматором через третий усилительньш и инвертирующий элементы.. . Недостатком известной системы является резкое- накренение л.а. при входе в линейную зону сигнала f,-датч ка отклонения л.а. от заданной траек тории и его колебания по крену при движении с курсом подхода в зоне насьщения сигнала . Целью изобретения является улучшение качества управления. Указанная цель достигается тем, что выход дифференцирующего элемента соединен с входом промежуточного сум матора. При этом нелинейньм элемент выпол нен в виде параллельного соединения ограничителя и усилительного элемента, либо в виде параллельного соединения двух ограничителей. На фиг.1 изображена блок-схема системы; яа фиг,2 - схема первого варианта нелинейного элемента и графики функций этого элемента и его составных частей/ на фиг.З - схема и графики второго варианта нелинейного элемента на фиг.4 - схема захода летательного аппарата на посадк (а) и осциллограммы изменения сигналов (б). Система содержит датчик 1 отклоне ния летательного аппарата от заданной траектории, датчик 2 отклонения курса л.а. от заданного курса, дифференцирующий элемент J с передаточн .функцией К р , усилительный элемент 4 с передаточной функцией К , усилительные элементы 5 и 6 с одинаКОБОЙ передаточной функцией К , инвертирующий элемент 7, нелинейный элемент 8, промежуточный 9 и выходной 10 сумматоры. Датчик отклонения л.а. от заданной траектории через параллельно включенные дифференцирующий 3 и усилительный 4 элементы соединен с входом промежуточного сумматора 9, выход которого через нелинейньш элемент 8 связан с входом выходного сумматора 10. Датчик 2 через усилительный 5 и инвертирующий 7элементы соединен с входом промежуточного сумматора 9 и через усилительньй элемент 6 - с входом выходного сумматора 10. На фиг.2,а показан один из предлагаемьк вариа1нтов выполнения нелинейного элемента 8. В данном случае элемент 8 вьтолнен в виде параллельного соединения ограничителя 11 и усилительного элемента 12. Фиг.2,б показывает графики функций эле ентов 11 (кривая 1), 12 (прямая 2) и всего нелинейного элемента 8 (кривая 3) в зависимости от входного сигнала Х; элемента 8. На фиг.З,а показан второй вариант выполнения элемента 8. В этом случае он представляет собой параллельное соединение ограничителя 11 и ограничителя 13. Фиг 3,6 показывает графики функций ограничителей 11 (кривая 1) и-13 (кривая 2) и всего элемента 8(кривая 3). Система с нелинейным элементом 8 (см.фиг.2) работает следующим образом. Предварительно настраиваются параметры элемента 8. Для этого коэффициент усиления К, ограничителя t1 (в пропорциональной части его характеристики) устанавливается в диапазоне. 0,7-0,85, коэффициент усиления К элемента 12 устанавливается равным 1- К( , уровень .ограничения ограничителя 11 устанавливается равнымХ4(1-Кги „„д -к КеЕогр где К, K.,K - характеристики элементов системы; (ПОАК. установленная величина курса подхода (обычно UV.OAX 30°);
3
о,р - величина ограничения
сигнала датчиком 1. Передаточные функции элементов системы 3-6 устанавливаются такие же, что и в известных системах.
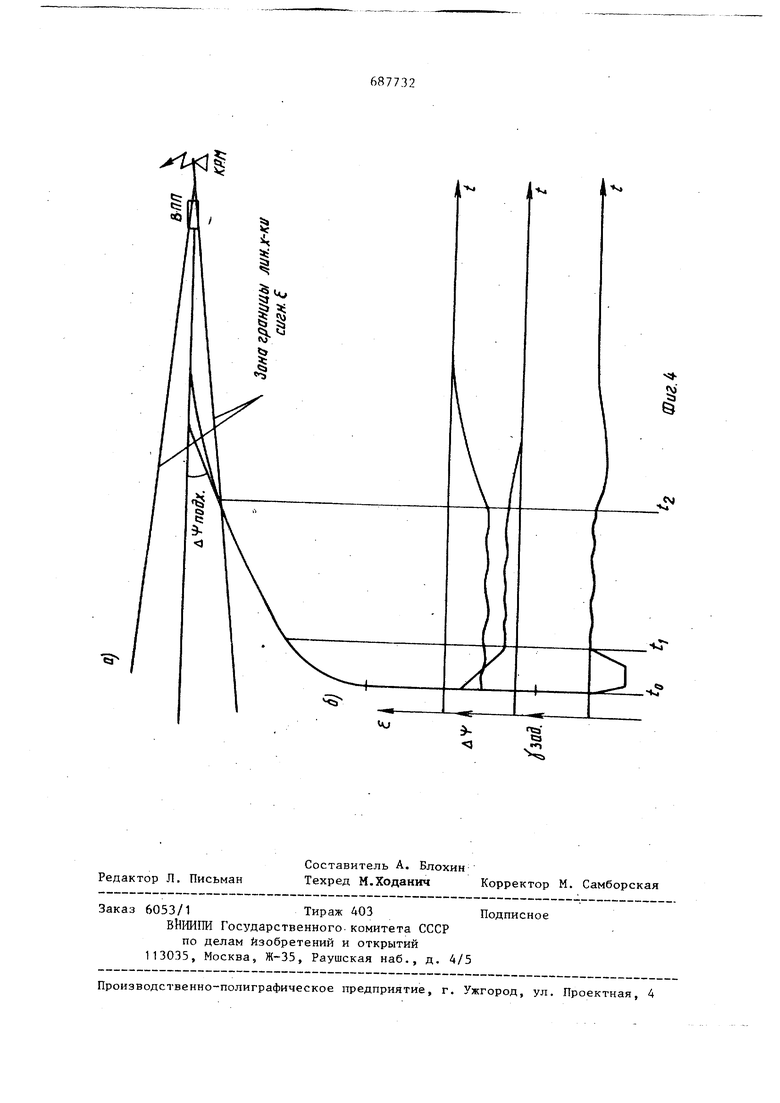
На фиг.4 показано действие системы на примере траекторного управления л.а. при заходе на посадку по сигналу курсового радиомаяка. На фиг.4,а показана схема захода. Обоз начения: ВПП - взлетно-посадочная полоса КРМ - курсовой радиомаяк, На фиг.4,б показаны соответствующие осциллограммы сигналов; , iV иу,.
В начале разворота сигнал, приходящий на выходной сумматор 10 с усилительного элемента 6, превышает сигнал, приходящий на тот же сумматор с нелинейного элемента 6. Разность этих сигналов приводит к образованию сигнала заданного креHajJ Qo., разворачивающего л.а. в сторону уменьшения сигнала йф . При уменьшении сигнала i()J до величины Ь( (момент 1, ) сигналы с выходов элементов 8 и 6 сравниваются, что приводит к уменьшению заданного крена ..д до нуля, после чего л.а. движется прямолинейно с курсом, равным курсу подхода Д(1 Непрямолинейная характеристика сигнала в его насыщенной части приводит к появлению на выходе элемента 3 производной Kg Однако на выход системы этот сигнал приходит ослабленным нелинейным элементом 8, работаю1дим на пологом участке своей характеристики. Вход л.а. в зону пропорциональной характеристики сигнала (момент {, ) сопровождается появление значительного сигнала К g на выходе элемента 3. Этот сигнал также проходит на выход системы ослабления коэффициентом К , с которым в это время работает нелинейный элемент 8. В результате заданной крен . плавно нарастает, после чего медленно уменьшается до нуля, обеспечивая нормальное вписывание л.а. на заданную траекторию. В конце переходного процесса выхода л.а. на заданую траекторию сигнал на входе нели324
немного элемента 8 уменьишется, этот элемент работает на крутом участке своей характеристики с коэффициентом усиления, равным единице. Отсюда следует, что в конце переходного процесса и после его окончания динамические и статистические характеристики управления, обеспечиваемые предлагаемой системой, совпадают с характеристиками известных систем-аналогов .
Нелинейный элемент 8, выполненный в виде параллельного соединения двух ограничителей (фиг.З), настраивается следующим образом. Характеристика ограничителя 11 не изменяется. Коэффициент усиления ограничителя 13 (в пропорциональной части его характеристики) устанавливается равным К . Уровень ограничения ограничителя 13 устанавливается равным
1 -огр
2огр 1-Х
Действие системы, нелинейный элемент 8 которой выполнен в виде соеди нения ограничителей 11 и 13, отличается лишь на этапе движения, л.а. на курсе подхода. В связи с тем, что нелинейный элемент 8 работает на этом этапе в точке его характеристики, соответствующей границе пропорциональной части ограничителя 13, сигнал производной Kg Е обусловленный непрямрлинейностью характеристики насыщения сигнала 6 , направленный на уменьшение курса подхода, проходит через элемент 8, ослабленный соответственно коэффициенту К. Тот же сигнал, но направленный на увеличение курса подхода, через элемент 8 не проходит совсем. Тем самым достигается еще большее ослабление колебаНИИ л.а. по крену при его движении на курсе подхода.
Таким образом значительно улучшается качество траекторного управления летательным аппаратом при его стабилизации на заданной траектории, если характеристика датчика отключения л,а. от заданной траектории имеет насыщение.
;
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВЫМ ДВИЖЕНИЕМ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2339990C1 |
| УСТРОЙСТВО КООРДИНИРОВАННОГО РЕГУЛИРОВАНИЯ УГЛОВОГО БОКОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1990 |
|
RU2047888C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2003 |
|
RU2234725C1 |
| УСТРОЙСТВО ДЛЯ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ БОКОВОГО КАНАЛА СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 1967 |
|
SU295368A1 |
| Способ и система управления продольным движением при разбеге по взлётно-посадочной полосе и наборе высоты беспилотного летательного аппарата со специально расположенными передними и задними крыльями | 2018 |
|
RU2695897C1 |
| СИСТЕМА АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2004 |
|
RU2284058C2 |
| МНОГОРЕЖИМНОЕ ЦИФРОАНАЛОГОВОЕ УСТРОЙСТВО УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ ПО ТАНГАЖУ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2014 |
|
RU2541903C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА В КАНАЛЕ КУРСА | 2021 |
|
RU2768310C1 |
| АВТОКОЛЕБАТЕЛЬНЫЙ РУЛЕВОЙ ПРИВОД ВРАЩАЮЩЕЙСЯ ПО КРЕНУ УПРАВЛЯЕМОЙ РАКЕТЫ | 2005 |
|
RU2288441C1 |
| ДВУХКАНАЛЬНОЕ УСТРОЙСТВО КООРДИНИРОВАННОГО УПРАВЛЕНИЯ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2532720C1 |
1, Система траекторного управления летательным аппаратом, содержащая датчик отклонения летательного аппарата от заданной траектории, датчик отклонения курса летательного аппарата от заданного курса, дифференцирующий нелинейный, инвертирующий, усилительные элементы, выходной и промежуточный сумматоры, причем датчик отклонения летательного аппарата от,заданной траектории связан с входами дифференцирующего и первого усилительного элементов, выход первого усилительного элемента черезпромежуточный сумматор и нелинейный элемент соединен с входом выходного сумматора, датчик отклонения курса летательного аппарата от заданного курса соединен через второй усили- тель:ный и инвертирующий элементы с входом промежуточного сумматора и через третий усилительный элемент - с входом выходного сумматора, отличающаяся тем, что, с целью улучшения качества управления, выход дифференцирующего элемента соединен с входом промежуточного сумматора.2.Система по п.1, отличающаяся тем, что нелинейный элемент выполнен в виде параллельно соединенных ограничителя и усилительного элемента.3.Система по п.1, отличающаяся тем, что нелинейный элемент выполнен в виде параллельно соединенньк двух'ограничителей.i(ЛСJtaJ Iа>&сх>&-si•^со ю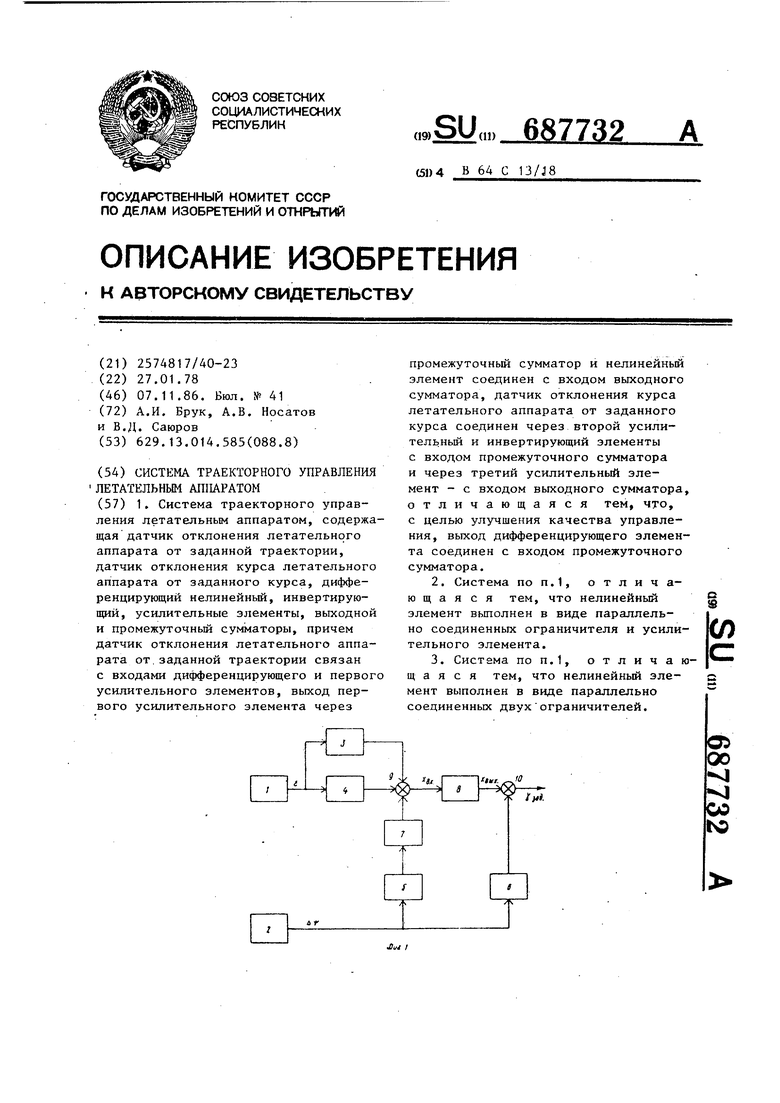
I)
Фиг. 2
Вых.
Хвых.
i,ozp. 2,огр,
//
дх.
