Известны устройства для обучения самолетовождению, основанные на имитации изменений показаний самолетных навигационных приборов, получающемся при перемещении самолета относительно радиомаяков.
Предложенное устройство отличается от известных тем, что установленные в классе рамки радиополукомпасов выполнены вращающимися независимо от их датчиков и с такой угловой скоростью, с какой изменяются углы пеленгов в имитируемом полете. Для вращения рамок применены храповые колеса, приводимые в движение с командного пункта посредством электромагнитов, питаемых импульсами электрического тока.
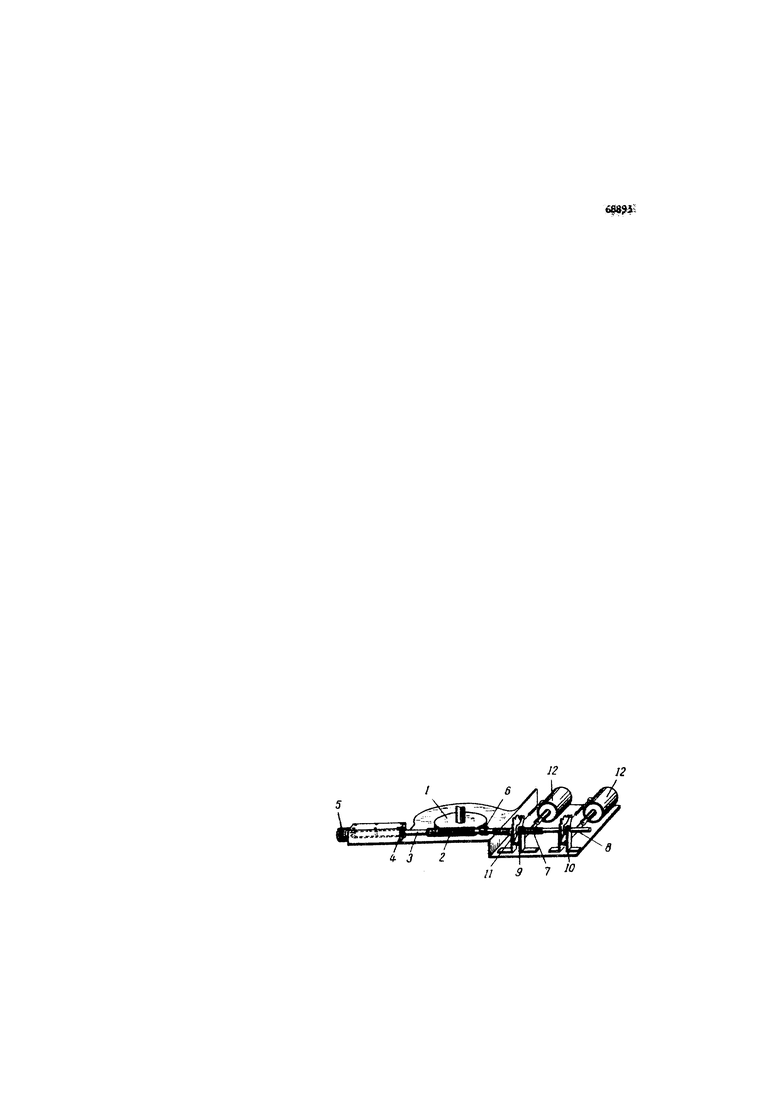
На чертеже схематично изображен дифференциал дня передвижения рамки радиополукомпаса, вид в плаце.
Дифференциал для передвижения одной из рамок радиополукомпаса независимо от ее датчика включает червячную шестерню 1 с червяком 2, закрепленным на валу 3, снабженном направляющей 4, шлицевой муфтой 5 и скользящей муфтой 6 сцепления. Кроме того, дифференциал имеет ходовой винт 7, на валу 8 которого установлены гайка 9, втулка 10 и храповые колеса 11 о электромагнитами 12.
При вращении ручки датчика рамки движение через гибкий валик передается на шлицевую муфту, а затем через направляющую на червяк и червячную шестерню, которая поворачивает рамку.
При вращении втулки вращается ходовой винт. Так как гайка неподвижна относительно корпуса дифференциала, ходовой винт получает вращательно-поступательное движение. При наличии скользящей муфты и необратимости червячной пары вращательное движение от ходового винта на червяк не передается, поэтому червяк будет иметь поступательное движение. Червяк, независимо от датчика рамки, будет вращать червячную шестерню. Обратное движение рамки осуществляется вращением гайки в ту же сторону, что и втулки. В этом случае ходовой винт и червяк будут двигаться в обратную сторону. Независимо от датчика рамка будет вращаться в противоположном направлении. Передача движения на все установленные рамки осуществляется с командного пункта при помощи храповых колес и электромагнитов, питаемых импульсами электрического тока.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД УСТАНОВКИ ДЛЯ ВЫРАЩИВАНИЯ МОНОКРИСТАЛЛОВ ПО СПОСОБУ ЧОХРАЛЬСКОГО | 1992 |
|
RU2051208C1 |
| СПОСОБ УПРАВЛЕНИЯ ГУСЕНИЧНОЙ МАШИНОЙ | 2024 |
|
RU2835218C1 |
| МНОГОЭТАЖНЫЙ ПРЕСС ДЛЯ ИЗГОТОВЛЕНИЯ ЛИСТОВЫХ ИЗДЕЛИЙ ИЗ ПЛАСТМАСС | 1969 |
|
SU256990A1 |
| Устройство для установки объектаВ зАдАННОМ пОлОжЕНии | 1979 |
|
SU822160A1 |
| УСТРОЙСТВО к СТАНКАМ ДЛЯ НАРЕЗАНИЯ РЕЗЬБ С НЕРЕМЕННЫМ ШАГОМ | 1973 |
|
SU379345A1 |
| Устройство для шлифования и полирования поверхностей тел вращения переменной кривизны | 1986 |
|
SU1346398A2 |
| МЕХАНИЗМ БЛОКИРОВКИ ДИФФЕРЕНЦИАЛА ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2242656C2 |
| СТАНОК ПЛОСКОШЛИФОВАЛЬНЫЙ ЭЛЕКТРОМЕХАНИЧЕСКИЙ | 1994 |
|
RU2080237C1 |
| СТАНОК ДЛЯ ГИБКИ РАМОК ИЗ МЕТАЛЛИЧЕСКОЙ ЛЕНТЫ | 1971 |
|
SU435883A1 |
| Устройство для вертикальной регулировки валка прокатной клети | 1986 |
|
SU1386322A1 |
1. Устройство для обучения самолетовождению путей имитации изменения показании самолетных навигационных приборов, получающихся при перемещении самолета относительно радиомаяков, отличающееся тем, что установленные в классе рамки радиополукомпасов выполнены вращающимися независимо от их датчиков и с такой угловой скоростью, с какой изменяются углы пеленгов в имитируемом полете.
2. Устройство по п. 1, отличающееся тем, что для вращения рамок применены храповые колеса, приводимые в движение с командного пункта посредством электромагнитов, питаемых импульсами электрического тока.
