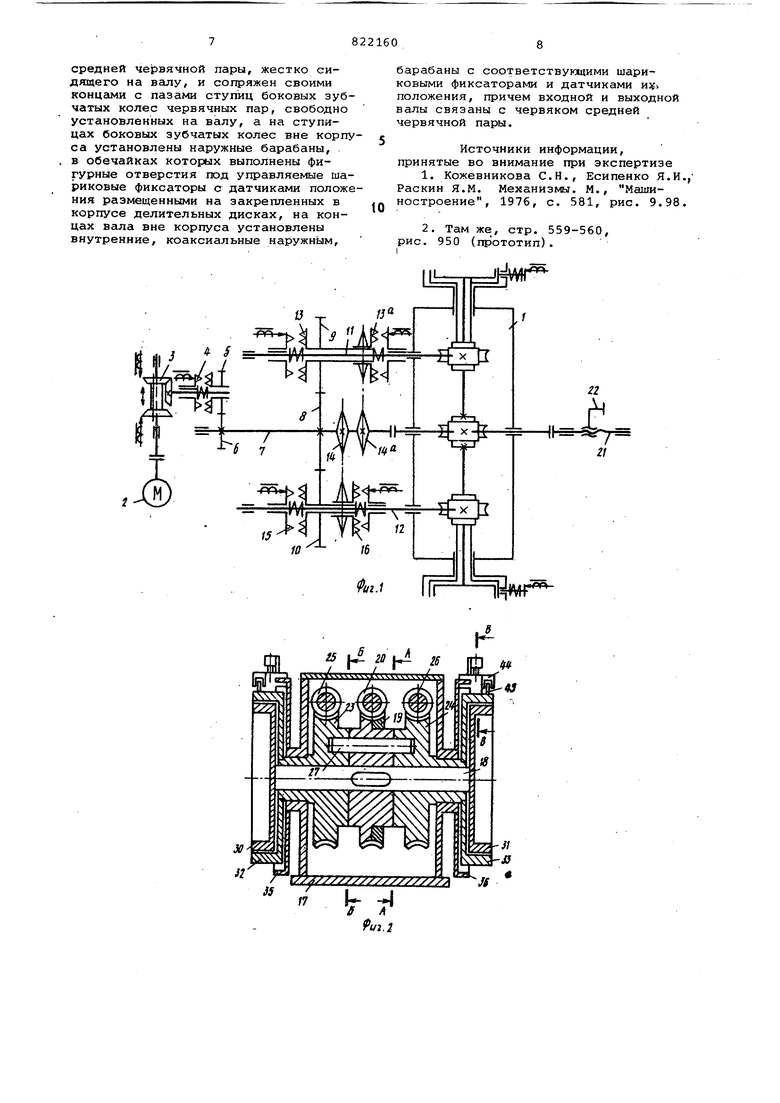
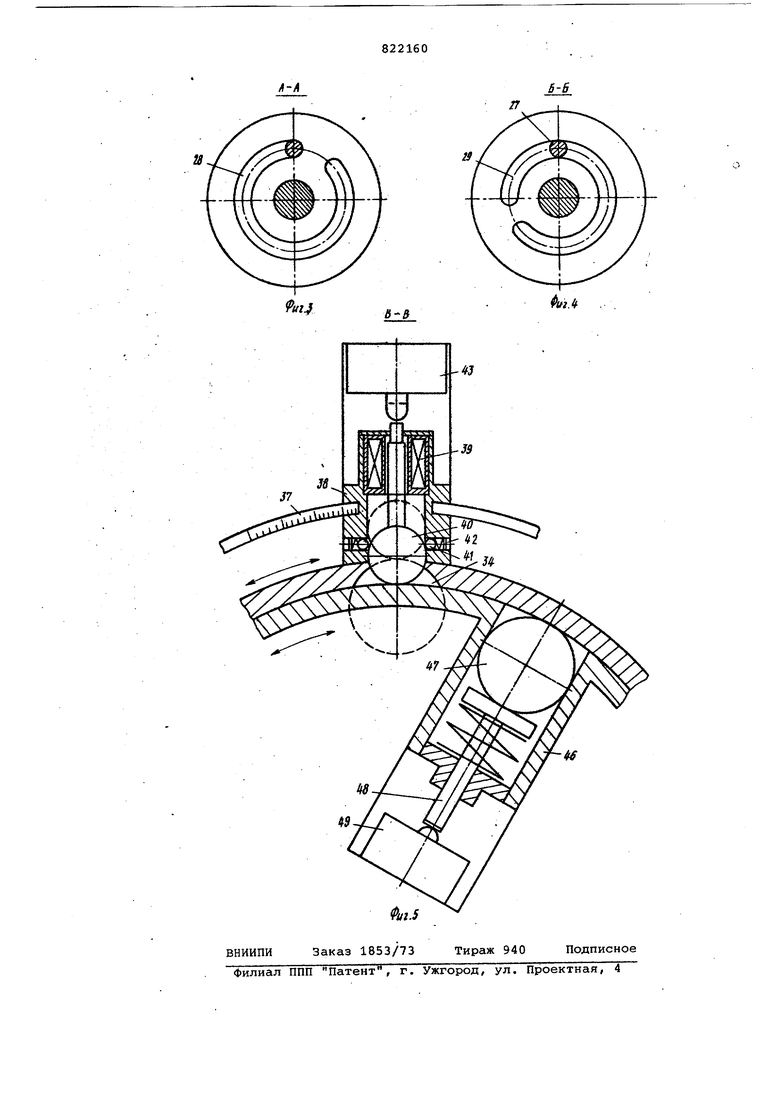
зубчатыми колесами, в которых выпол нены пазы под палец, входной и выходной валы, содержит также три червячные пары, причем палец закреплен в ступице колеса средней червячной пары, жестко сидящего на валу, и сопряжен своими концами с пазами ступиц боковых зубчатых колес червячных пар, свободно установленных на валу,-а на ступицах боковых зубчатых колес вне корпуса установлены наружные барабаны, в обечайках которых выполнены фигурные отве стия под управляемые шариковые фиксаторы с датчиками положения, размещенными на закрепленных в корпусе делительных дисках, на концах вала вне корпуса установлены внутренние коаксиальные наружным, барабаны с соответствующими шариковыми фиксаторами И датчиками их положения, причем входной и выходной валы связаны с червяком средней червячной пары. На фиг. 1 представлена кинематическая схема, в которую включено за1ЦИ1чаемое устройство; на фиг. 2 предлагаемое устройство, общий вид на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-В на фиг. 2; на фиг, 5 - разрез В-В на фиг. 2. Кинематическая схема включает устройство 1 для установки объекта в заданном положении и привод к нему, содержавши электродвигатель 2 и дифференциал 3, который может иметь два положения, обеспечивая реверс передачи. На выходном валу дифференциала устанавливается кулач ковая муфта 4 с демпфером, при вклю чении которой крутящий момент передается через зубчатые колеса 5 и 6 входному валу 7 со смонтированным на нем зубчатым колесом 8, входящим в зацепление с -колесами 9 и 10, свободно сидящими на валах 11 и 12 На этом же валу 7 установлены звездочки цепной передачи 14 и 14а, пер дакнчие крутящий момент вала 11 и 12 при необходимости вращения того илиДругого вала в одном направлении с центральным валом 7. При необходимости Шдения вгшов 11 и 12 в тротивоположном направлении по от ношению к вращению центрального . 7 вращение передается посредcfBOM зубчатых колес 9 и 10. Включе ние вала 11 на зубчатую передачу производится кулачковой электромагнитной муфтой 13, на цепную - му той 13а, а включение вала 12 произ. водится муфтами 15 и 16 соответстве но. Такая кинематическая схема обеспечивает автономное вращение ва лов 11 и 12 относительно друг друга и их реверс при работе от одного электродвигателя независимо от реве са дифЛеренциала. В корпусе 17 собственно устройства на валу 18 жестко посажено 4iepвячное колесо 19, входящее в зацепление с червяком 20, один конец которого кинематически связан с входным валом 7, а другой - с управляемым объектом, например выходным валом 21 (ходовым винтом) упорной линейки 22. На этом же валу 13 свободно посажены боковые червячные зубчатые колеса 23 и 24, входящие в зацепление с червяками 25 и 26, концы которых кинематически связаны с валами 11 и 12 электропривода. На ступице червячного колеса 19 средней червячной пары, венец которого выполнен с учетом выбора зазора в зацеплении, жестко установлен палец 27, сопряженный своими концами с глухими лаэамк 28 и 29, выполненными в боковых ступицах чер вячных колес 23 и 24. На концах вала 18 вне корпуса 17 смонтированы внутренние барабаны 30 и 31, а на ступицах колес 23 и 24 установлены наружные барабаны 32 и 33, на обечайках которых выполнены фигурные отверстия 34. С обеих сторон Корпуса 17 жестко крепятся делительные диски 35 и 36 со шкалой 37 деления, по окружности которых установлено необходимое (в зависимости от программы) количество управляемых шариковых фиксаторов 38 в положении, огфеделяемом шкгшой 37 деления. . Цена деления шкалы 37 на диске находится в прямой зависимости как |от центрсшьной червячной пары 19 и 20, так и {в данном случае) от шага ходового винта, по которому перемещается упорная линейка 22. В корпусе шарикового фиксатора 38 располагаются электромагнит 39, взаимодействующий с шариком 40, который в исходном положении удерживается в полости корпуса фиксатора шариками 41 с пружинами 42. На корпусе фиксатора 38 над электромагнитом 39 установлен;датчик положения - конечный выключатель 43, а сбоку корпуса фиксатора 38 установлен датчик положения - бесконтактный путевой выключатель 44, сквозь паз которого проходит при своем вращении пластина45, установленная на наружных барабанах 32 и 33. В полости внутренних барабанов 30 и 31 по радиусу установлено по одному шариковому фиксатору 46 с шариком 47 и подпружиненным толкателем 48, взаимодействующим с датчиком положения - конечным выключателем 49. Устройство работает следующим образом. При pai6oTe электродвигателя 2 кинематически приводится в движение центральный червяк 20 и боковые червяки 25 и 26. в свою очередь, эти червяки приводят во вращательное дв жение червячные колеса 19, 23 и 24, заставляющие врсицаться вал 18 с 30 и 31 и внутренними барабанами 33, приче1 Г наружные барабаны 32 и и 31 при сво внутренние барабаны 30 вращении отстают на некоторый уголот наружных за счет разных передаточных чисел центральной червячной пары 19 и 20 и боковых - 23, 25 и 24, 26. ) Рассмотрим сначала работу одной п ловины устройства, например правой При вращении колеса 24 совместно с ним вра1дается и наружный барабан 33 и в процессе движения проходит своим фигурным отверстием 34 под фиксаторами 38. В зависимости от рабочего цикла определяется последовательность включения бесконта ного путевого выключателя, включающего электромагнит 39 на том или ином фиксаторе. Программа задается шаговым искателем (не показан). Пластина 45, вращаясь совместно с наружным барабаном 33, проходит по пазу бec oнтaктнoгo путевого выключателя 44, и если данный выключатель находится в рабочем положении в соответствии с программой, то он включает электромагнит 39, который давит своим сердечником на шарик 40, преодолевая усилие со стороны пружин 42. Когда фигурное отверстие 34 наружного барабана 33 окажется под фиксатором 38, шарик 40 под воздействием сердечника электромагнита 39 западет в отверстие 34 и остановит наружный барабан 33, а вместе с ним и колесо 24 с пазом 28, расположение торцов которого соответствует положению фигурного отверстия 34 относительно шкалы 37 на диске 36. При западании шарика 40 конечный выключател отключает соответствующую муфту 15 или 16 и фиксирует положение барабана 33. Внутренние барабаны 30 и 31 продолжают вращаться. При достижении фиксатором 46 фигурного отвер стия 34, шарик 47 западает в фигурное отверстие 34 и конечный выключ тель 49 отключает муфту 4, палец 27 упирается своим концом в торец паза 28, осуществляя точный фикси рованный останов червяка 20, к одному из донцов которого подсоединен управляемый объект, в данном случае ходовой винт 21 упорной линейки 22 листогибочного пресса. При западанин шарик 47 выталкив ет шарик 40 в корпус фиксатора 38, освобождая, наружный барабан 33 для вращения его в соответствии с программой. Так же работает и другая половина устройств фиксации вала. Цикл повторяется. Наружные барабаны 32 и 33 работ ют совместно, независимо друг от друга. Один из них предназначен для нахождения заданного положения при поступательном движении объекта, другой - при его возвратном движении. В соответствии с этим отсчет шкалы на одном делительном диске, например диске 35, возрастает по часовой стрелке, а на диске 36 - против часовой стрелки. Если необходимо получить только два фиксированных положения управляемого объекта, устанавливается по одному фиксатору как на правом 33, так и на левом 32 наружных барабанах, которые остаются неподвижными при данном рабочем цикле. Между ними вра1;1аются внутренние барабаны, фиксируя два точных останова управляемого объекта. Данное устройство позволяет получить такое количество фиксированных положений, сколько фиксаторов возможно установить по окружности диска 35 или 36 со шкалой 37 деления, т.е. практически необходимое количество фиксированных положений. Наружные барабаны с фигурными отверстиями в их обечайках, смонтированных на одном валу с внутренними барабанами с возможностью вращения относительно друг друга и взаимодействующие с шариковыми фиксаторами, автоматически устанавливают необходимое количество заданных положений вала, а установленные на этом же валу три червячных колеса с пальцем на ступице среднего колеса, входящим в пазы ступиц боковых колес, обеспечивают точные остановы вала и управляемого объекта соответственно, в этих заданных положениях. Устройство установки объекта в заданном положении позволяет автоматически получить необходимое количество фиксированных положений без применения сложных управляющих электронных устройств и с тем же быстродействием, так как в конечном результате быстродействие определяется механикой устройства. Если рассматривать это устройство как орган управления заднего упора листогибочного пресса, то производительность пресса возрастет во столько раз, сколько гибов необходимо осуществить на обрабатываемой детали. Формула изобретения Устройство для установки объекта в заданном положении, содержащее корпус с зубчатыми колесами, в которых выполнены пазы под палец, входной и выходной валы, отличающееся teM, что, с целью расширения области применения, оно содержит три червячные пары, причем палец закреплен в ступице колеса
средней червячной пары, жестко сидящего на валу, и сощзяжен своими KOHueuviH с пазами ступиц боковых зубчатых колес червячных пар, свободно установленных на валу, а на ступицах боковых зубчатых колес вне корпуса установлены наружные барабаны, в обечайках которых выполнены фигурные отверстия под управляемые шариковые фиксаторы с датчикс1ми положения размещенными на закрепленных в корпусе делительных дисках, на концах вала вне корпуса установлены внутренние, коаксиальные наружным.
барабаны с соответствующими шариковыми фиксаторами и датчиками из{ положения, причем входной и выходной валы связаны с червяком средней червячной пары.
Источники информации, принятые во внимание при экспертизе
1.Кожевникова С.Н., Есипенко Я.И., Раскин Я.М. Механизмы. М., Машиностроение, 1976, с. 581, рис. 9.98.
2.Там же, стр. 559-560, рис. 950 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗВЛЕЧЕНИЯ ТЕХНОЛОГИЧЕСКОГО КАНАЛА ИЗ УРАН-ГРАФИТОВЫХ АТОМНЫХ РЕАКТОРОВ | 1996 |
|
RU2094864C1 |
| РЕГУЛЯТОР ТЯГОВОГО МЕХАНИЗМА ДЛЯ БАРАБАННОГО ТОРМОЗА И БАРАБАННЫЙ ТОРМОЗ | 2006 |
|
RU2395018C2 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 1995 |
|
RU2098749C1 |
| ЛЕБЕДКА | 2009 |
|
RU2401242C1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ РЕГУЛИРОВКИ ЗАЗОРА С МУФТОЙ С ШАРИКОВЫМИ ФИКСАТОРАМИ | 2009 |
|
RU2517570C2 |
| МЕХАНИЗМ ПЕРЕМЕЩЕНИЯ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 1993 |
|
RU2062974C1 |
| КОМБИНИРОВАННЫЙ ПРИВОД ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА ОТ ЭЛЕКТРОДВИГАТЕЛЯ И/ИЛИ ОТ РУЧНОГО УСИЛИЯ (ВАРИАНТЫ) | 2002 |
|
RU2226633C1 |
| СИСТЕМА УПРАВЛЕНИЯ ЧРЕСКОСТНЫМ АППАРАТОМ | 2006 |
|
RU2327430C1 |
| Управляемый вспомогательный кривошипный механизм кривошипной кузнечно-прессовой машины | 1985 |
|
SU1258710A1 |
| ПРИВОД МАНИПУЛЯТОРА | 1992 |
|
RU2024387C1 |
J2
JS Т
1
