1129
Изобретение относится к способам дозированной погрузки сыпучих материалов в движущиеся транспортные средства, а именно в составы железнодорожных вагонов с открытыми кузовами.
Целью изобретения является повышение качества загрузки вагонов.
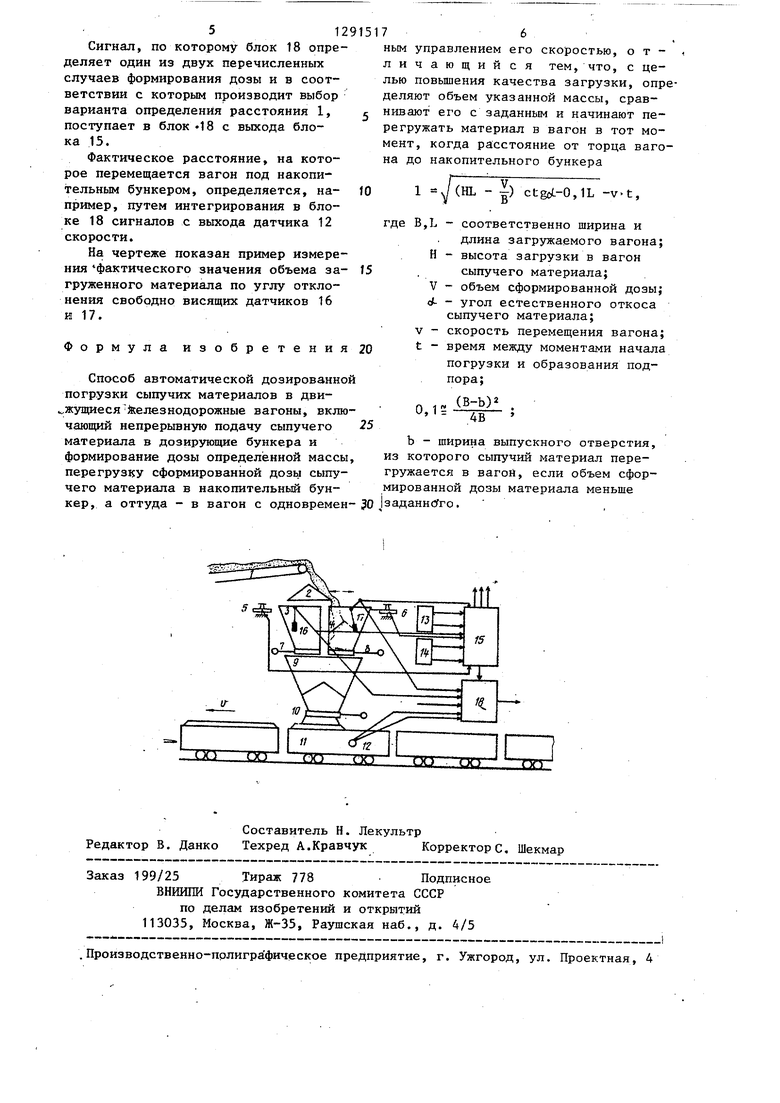
На чертеже схематично изображен вариант устройства для реализации способа, общий вид.
Способ включает в себя непрерывную подачу сыпучего материала в дозирующие бункера с заданием массы дозы и максимального объема материала, который может быть погружен в вагон, определение в темпе с процессом объема и массы поступившего в дозирующий бункер сыпучего материала, сравнение этих параметров с заданными и окончание формирования дозы в момент достижения равенства текущей и заданной величины любого из двух указанных параметров, после конца формирования дозы фиксируют фактичес кое значение объема сформированной дозы и начинают загружать материал в вагон в тот момент, когда расстояние 1 от торца вагона до накопительного бункера станет равным
,
1 / (HL- |)ctgot-0,1L -vt,
де B,L - соответственно ширина и
длина загружаемого вагона;
Н - высота загрузки сыпучего материала в вагоне;
V - объем сформированной дозы;
ot - угол естественного откоса сыпучего материала;
V - скорость перемещения вагона;
t - известное время между моментами начала погрузки и образования подпора;
(в-Ь) .
о.
4Б
b - ширина вьшускного отверстия, из которого сыпучий материал перегружается в вагон, если объем сформированной дозы материала меньше заданного.
В случае, если объем сформированной дозы материала равен заданному, то загрузку вагона начинают в тот момент, когда расстояние равно нулю.
fO
15
20
25
Устройство для реализации способа состоит из контейнера 1, по которому сыпучий материал через распределитель 2 потока подается в один из двух дозирующих бункеров 3 и 4, опирающихся соответственно на весоизмерительные датчики 5 и 6.
Бункеры снабжены затворами 7 и 8. Под дозирующими бункерами установлен накопительньш бункер 9 с затвором 10. Сыпучий материал загружается в железнодорожные вагоны 11, скорость перемещения .которых измеряется датчиком 12. Устройство содержит также задатчики величин объемов 13 и масс 14 дозируемого материала, выходы которых подключены к логическо-уп- равляющему блоку 15. На вход этого блока подаются также сигналы с выхода весоизмерительных датчиков 5 и 6 и измерителей 16 и 17 объема материала, загружаемого соответственно в бункеры 3 и 4. Блок 15 управляет приводами затворов дозирующих бункеров 3 и 4 и распределителя 2 потока..
Вычислительно-управляющий блок 18 управляет приводом затвора 10 накопительного бункера 9. На вход блока 18 подаются сигналы с выхода датчика 12 скорости перемещения вагонов и измерителей 16 и 17 объема, а также вводятся данные о размерах кузова вагона,находящегося под по35 грузкой.
Предлагаемый способ реализуется следующим образом.Сыпучий материал подают с конвейера 1 в один из дозирующих бункеров,
40 например 4, формируя в нем дозу. Весовой датчик 6 и измеритель 17 измеряют массу и объем поступающего материала. Фактические величины объема и массы сравниваются в блоке 15
45 с заданными значениями, поступающими с выходов задатчиков 12 и 14. При дозировании материалов разли чной насыпной плотности возможны два случая:
50 Б бункере 4 формируется доза материала с малой насыпной плотностью, при которой доза, сформированная по массе, не разместится в кузове железнодорожного вагона. При погрузке та55 ких материалов занимаемый дозой объем достигнет своего заданного значения раньше, чем ее масса - заданной величины дозы, формирование п-й дозы закончится по сигналу равенства задан-.
30
ного и фактического значения объемов По этому сигналу распределитель 2 потока перемещается по чертежу вправо и поток материала поступает в бункер 3, где начнет формироваться (п+1)-я доза.
В бункере 4 формируется доза материала с большой насыпной плотностью, при этом масса дозы достигнет своей заданной величины раньше, чем ее объем, формирование п-й дозы закончится по сигналу равенства заданного и фактического значения массы, по этому сигналу распределитель 2 потока переместится так же, как и в пер- вом случае, вправо. В бункере 3 начнет формироваться (п+1)-я доза.
Одновременно с формированием в дозировочном бункере 3 (n+1)-ii дозы с помощью измерителя 17 фиксируется объем п-й дозы в бункере 4, затем подается команда на открытие затвора 8 и п-я доза пересыпается в накопительный бункер 9. После опорожнения бункера 4 его затвор 8 закрывается, и бункер считается подготовленным к формированию очередной (п+2)-й дозы.
До начала погрузки п-й дозы в вагон в память вычислительно-управляющего блока 18 заносятся величины линейных размеров, известные значения интервала времени от начала по- грузки материала в вагон до образования подпора, а также угла сА естественного откоса загружаемого ма- териала. Б процессе погрузки в блоки 13 и 14 оператор вводит только значения масс доз и объемов кузовов загружаемых вагонов.. По введенному значению объема кузова из памяти , блока 18 извлекаются соответствующие значения линейных размеров кузова, которые используются для расчета заданного расстояния 1, на которое необходимо переместить под накопи- тельным бункером вагон до момента начала его загрузки (момента подачи сигнала на открытие затвора 10 накопительного бункера 9).
Формула, по которой определяется расстояние 1,имеет следующий вид
1
(В-.Ъ) 4Б
4
)ct..- fi|ll(B-b.3L)-vt.
где B,L - соответственно ширина и
длина загружаемого вагона; Н - высота загрузки сыпучего
материала в вагоне; V - объем сформированной дозы; d- - угол естественного откоса
сыпучего материала; V скорость перемещения вагона;
t - время между моментами начала погрузки и образования подпора;
b - ширина выпускного отверстия, из которого сыпучий материал перегружается в вагон.
В процессе разработки предлагаемого способа был проведен специальный анализ, который показал,.что с достаточной для практических целей точностью можно упростить известные формулы по определению искомого расстояния 1 (погрешность определения 1 около 10 см). Это расстояние равно нулю в случае, когда занимаемьш дозой объем достигнет своего заданного значения раньше, чем ее масса достигнет заданной величины дозы. В случае, когда масса дозы достигнет заданной величины раньше, чем ее объем искомое расстояние 1 определяется в вычислительно-управляющем блоке 18 по формуле
1 -l/(HL- |-) ctpot-0,1L - vt.
Данная формула может быть получена из указанной, если пренебречь практически всеми слагаемыми с множителями (В-Ь). Это можно сделать, так как величина В (.ширина вагона) и b (ширина выпускного отверстия) на практике достаточно близки по своему численному значению. Исклю- . чение было сделано только для одного слагаемого, которое дополнительно умножается на величину L, а именно СВ-Ь) , .4. Учитывая, что ширина всех вагонов, в которые загружается сыпучий материал, практически одинакова, а ширина выпускного отверстия для данного устройства величина постоянная, в результате анализа было решено заме- (В-Ь)2
нить отношение
4В
близким по
значению коэффициентом 0,1,
5129
Сигнал, по которому блок 18 определяет один из двух перечисленных случаев формирования дозы и в соответствии с которым производит выбор варианта определения расстояния 1, поступает в блок «18 с выхода блока 15.
Фактическое расстояние, на которое перемещается вагон под накопительным бункером, определяется, например, путем интегрирования в блоке 18 сигналов с выхода датчика 12 скорости.
На чертеже показан пример измерения фактического значения объема загруженного материала по углу отклонения свободно висящих датчиков 16 и 17.
Формула изобретения
Способ автоматической дозированно погрузки сыпучих материалов в дви- жущиеся йелезнодорожные вагоны, включающий непрерывную подачу сыпучего материала в дозирующие бункера и формирование дозы определённой массы перегрузку сформированной дозы сыпучего материала в накопительный бункер, а оттуда - в вагон с одновремен
fO
151
76
ным управлением его скоростью, отличающийся тем, что, с целью повышения качества загрузки, определяют объем указанной массы, сравнивают его с заданным и начинают перегружать материал в вагон в тот момент, когда расстояние от торца вагона до накопительного бункера
1 J(HL - |) ctgoL-0,1L -V t, V Ь
де B,L - соответственно ширина и
длина загружаемого вагона; Н - высота загрузки в вагон
сыпучего материала; V - объем сформированной дозы; d- - угол естественного откоса
сыпучего материала; V - скорость перемещения вагона; t - время между моментами начала погрузки и образования подпора ;
0,1
„ (B-b)i
АВ
b - ширина выпускного отверстия, из которого сыпучий материал перегружается в вагон, если объем сформированной дозы материала меньше заданного.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дозированной погрузки сыпучих материалов в железнодорожные вагоны | 1985 |
|
SU1294733A1 |
| Способ автоматической дозированной погрузки сыпучих материалов в движущиеся железнодорожные полувагоны | 1978 |
|
SU765163A1 |
| Способ дозированной погрузки сыпучих грузов | 1988 |
|
SU1664685A1 |
| Устройство автоматического управления загрузкой сыпучего груза в вагоны непрерывно перемещаемого состава | 1983 |
|
SU1134512A1 |
| Устройство автоматического управления установкой для загрузки вагонов дозированными порциями сыпучего груза | 1980 |
|
SU889580A1 |
| Способ непрерывной погрузки сыпучих и кусковых материалов с подпором в железнодорожные полувагоны | 1978 |
|
SU725985A1 |
| Устройство автоматического управленияуСТАНОВКОй для зАгРузКи ВАгОНОВдОзиРОВАННыМи пОРцияМи СыпучЕгОгРузА | 1979 |
|
SU814835A1 |
| Устройство автоматического управления передвижным конвейером для загрузки вагонов сыпучим грузом | 1983 |
|
SU1134511A1 |
| Устройство для погрузки сыпучих и кусковых материалов в железнодорожные полувагоны | 1981 |
|
SU979245A1 |
| Способ погрузки сыпучих грузов в полувагоны | 1976 |
|
SU606797A1 |
Изобретение относится к способам высокопроизводительной непрерывной погрузки в составы железнодорожных вагонов с открытыми кузовами и может быть использовано в угольной, горнодобывающей, строительной и др. отраслях промышленности. Целью изобретения является повьш1ение качества загрузки вагонов при изменяющейся плотности загружаемых материалов. Новым в предложенном способе является одновременное задание массы и объема дозы, прекращение формирования дозы в момент, достижения равенства текущей и заданной величины любого из двух указанных параметров и определение момента начала загрузки вагона с целью обеспечения равномерной нагрузки на его оси. 1 йл. SS сл to Ф СП vi
-i-ZU20CXJ txT cxj op
Составитель Н. Лекультр Редактор В. Данко Техред А.Кравчук Корректоре, Шекмар
Заказ 199/25 Тираж 778Подписное
ВНИИШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
.Производственно-полигра фическое предприятие, г. Ужгород, ул. Проектная, 4
ТУГ
| Авторское свидетельство СССР | |||
| Способ автоматической дозированной погрузки сыпучих материалов в движущиеся железнодорожные полувагоны | 1978 |
|
SU765163A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
