Эта цель достигается тем, что в систему управления дополнительно введены последовательно включенные операционный усилитель с тиритовым резистором на его входе и блок дифференцирования, а также два суммирующих усилителя с двумя входами, выходы которых подключены к двум входам опорных напряжений блока ограничения регулятора скорости, причем тиритовый резистор подключен к выходу датчика момента нагрузки на двигатель, к первым входам каждого из суммирующих усилителей подключены напряжения задания опорных напряжений блока ограничения с разными знаками, а вторые входы через диоды соединены с выходом блока дифференцирования, который соединен также со входом регулятора тока.
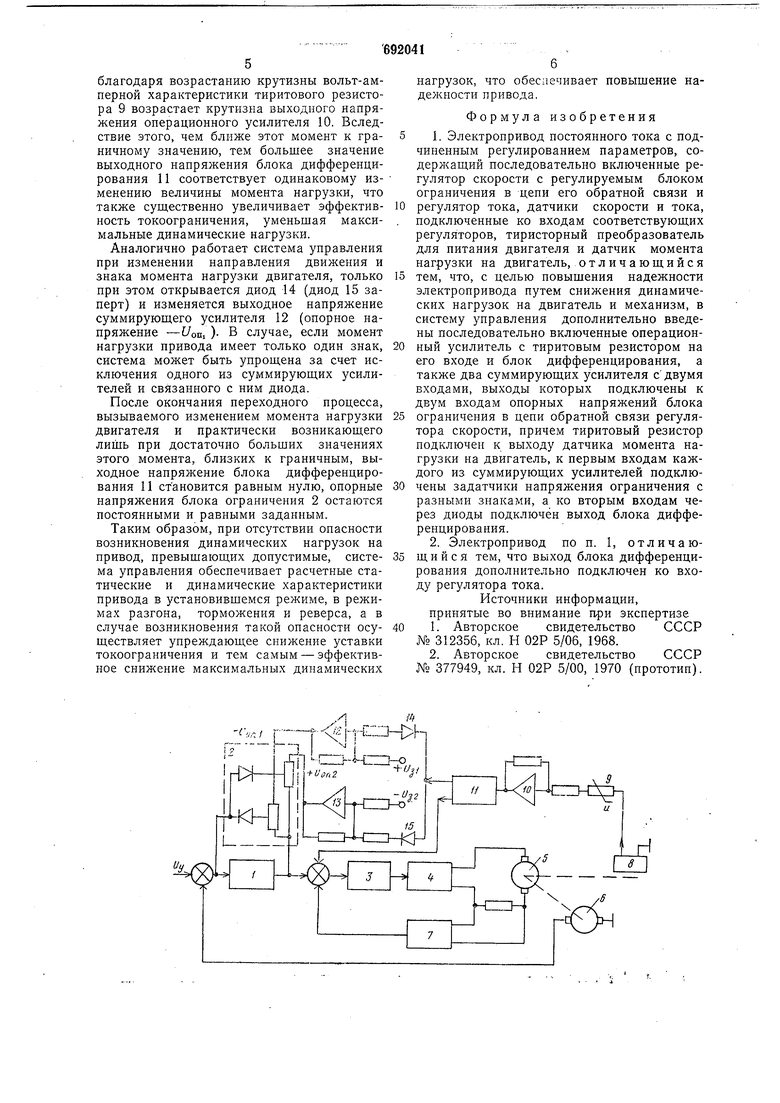
На чертеже приведена схема электропривода. Она включает в себя регулятор скорости 1, в обратную связь которого включен блок ограничения 2 с двумя входами опорных напряжений, регулятор тока 3, тиристорный преобразователь 4, питающий двигатель 5, датчики скорости 6, тока 7 и момента нагрузки на двигатель 8, выход последнего через тиритовый резистор 9 подключен ко входу операционного усилителя 10, соединенного со входом блока дифференцирования 11. К двум входам опорных напряжений блока ограничения 2 регулятора скорости подключены выходы суммирующих усилителей 12 и 13 с двумя входами каждый, причем к их первым входам подключены напряжения Оз, и U задания опорных напряжений t/oni и t/on блока ограничения 2, а вторые входы через диоды 14 и 15 соединены с выходом блока дифференцирования И, который подключен также ко входу регулятора тока 3.
Работает система следующим образом.
Поскольку тиритовый резистор 9 имеет гладкую нелинейную вольт-амперную характеристику с крутизной, возрастающей от нуля с увеличением приложенного к ней напряжения, при малых значениях момента нагрузки на двигатель, а следовательно, и малом выходном напряжении датчика 8 этого момента, мало и выходное напряжение операционного усилителя 10. Вследствие малой крутизны вольт-амперной характеристики тиритового резистора 9 в зоне малых входных напряжений, изменение момента нагрузки двигателя в зоне его малых значений почти не влияет на изменение выходного напряжения операционного усилителя 10, а потому и выходное напряжение блока дифференцирования 11 близко к нулю. В режимах, когда момент нагрузки двигателя не изменяется или изменяется медленно (при любых его абсолютных значениях), выходное напряжение блока дифференцирования 11 также практически равно нулю, т. к. при этом не изменяется или
изменяется медленно его входное напряжение.
При этом значения опорных напряжений f/oni и t/oHj блока ограничения 2 определяются только величинами напряжений бз, и и.,, подаваемых на первые входы суммирующих усилителей 12 и 13, и остаются практически постоянными.
Предложенная система работает как обычная система подчиненного регулирования с постоянным токоограничением, в том числе в режимах разгона, торможения и реверса.
Если же происходит быстрое нарастание момента нагрузки двигателя, быстро изменяется выходное напряжение операционного усилителя 10, на выходе блока дифференцирования появляется определяемое этим изменением напряжение, которое поступает на второй вход одного из суммирующих усилителей 12 или 13 через диоды 14 и 15. Диоды 14 и 15 включены так, что поступающий с выхода блока дифференцирования сигнал обеспечивает уменьшение выходных напряжений суммирующих усилителей 12 или 13.
Рассмотрим работу схемы при одном направлении движения. Положительному значению управляющего напряжения соответствует отрицательное выходное напряжение регулятора скорости 1, ограничение которого при этом определяется величиной опорного напряжения Полярность выходного напряженин датчика момента нагрузки 8 выбирается такой, что при возрастании абсолютного значения реактивного момента нагрузки на выходе блока дифференцирования 11 возникает положительное напряжение, которое через диод 15 поступает на второй .вход суммирующего усилителя 13 и уменьшает его выходное напряжение, т. е. опорное напряжение ,, и тем самым уменьшает уставку токоограничения в сторону
возрастающего момента нагрузки, не изменяя ее для противоположного знака тока двигателя, поскольку при этом диод 14 заперт. Благодаря этому обеспечивается упреждающее токоограничение, которое вступает в действие еще до достижения током и моментом его граничного значения, причем тем раньше, чем больше скорость нарастания момента нагрузки, вследствие чего увеличивается эффективность токоограничения и уменьшаются максимальные нагрузки. Поступающий одновременно с этим сигнал с выхода блока дифференцирования 11 на вход регулятора тока 3 складывается с сигналом обратной связи по току, поступающему с выхода датчика тока 6, что еще больше увеличивает эффективность токоограничения и способствует максимальных динамических нагрузок.
По мере возрастания момента нагрузки
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод | 1983 |
|
SU1112520A1 |
| Электропривод переменного тока | 1986 |
|
SU1332506A1 |
| Устройство для управления редукторным электроприводом | 1972 |
|
SU585583A1 |
| Электропривод | 1986 |
|
SU1372580A1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Электропривод постоянного тока с упреждающим токоограничением | 1978 |
|
SU1105999A1 |
| Устройство управления электроприводом | 1985 |
|
SU1305640A2 |
| Задающее устройство | 1978 |
|
SU764078A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
