Изобретение относится к области радиотехнических измерений и параметров морского волнения и может быть использовано для измерения высоты, длины и направления распространения морских волн с целью безопасности посадки летательных аппаратов на воду, повышения достоверности прогнозов погоды, выбора оптимальных путей плавления судов, в океанографических научных исследованиях.
Известно устройство для измерения параметров морских волн.
Недостатком этого устройства является низкая точность измерений.
Наиболее близким по технической сущности и достигаемому результату является устройство для измерения параметров морского волнения с летательного аппарата, содержащее антенну, антенный коммутатор, передатчик, приемное устройство, включающее последовательно соединенные приемник, детектор огибающей, центрирующее устройство, квадратор, первый фильтр нижних частот, а также индикатор, при этом выход детектора огибающей через второй фильтр нижних частот и блок автоматической регулировки усиления соединен с входом приемника.
Недостатком данного устройства является низкая точность определения состояния морской поверхности, поскольку измеряется только высота морских волн.
Целью изобретения является повышение точности определения состояния морской поверхности путем одновременно измерения высоты, длины и направления распространения морских волн.
Указанная цель достигается тем, что в устройство для измерения параметров морского волнения с летательного аппарата, содержащее антенну, антенный коммутатор, передатчик, приемное устройство, включающее последовательно соединенные приемник, детектор огибающей, центрирующее устройство, квадратор, первый фильтр нижних частот, а также индикатор, при этом выход детектора огибающей через второй фильтр нижних частот и блок автоматической регулировки усиления соединен с входом приемника, в приемное устройство дополнительно введена цепь, состоящая из последовательно соединенных компаратора нулевого уровня, преобразователя период-напряжение, третьего фильтра нижних частот, множительного устройства и второго индикатора, причем вход компаратора нулевого уровня подключен к выходу центрирующего устройства, а на один из входов множительного устройства поступает с бортового измерителя скорости полета напряжение, пропорциональное этой скорости.
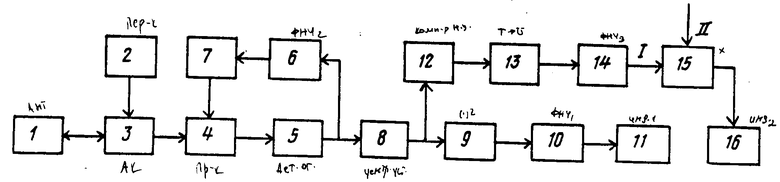
На чертеже представлена функциональная схема устройства для измерения параметров морского волнения.
Устройство содержит: антенну 1, передатчик 2, антенный коммутатор 3, приемник 4, детектор огибающей 5, второй фильтр нижних частот 6, блок автоматической регулировки усиления 7, центрирующее устройство 8, квадратор 9, первый фильтр нижних частот 10, первый индикатор 11, компаратор нулевого уровня 12, преобразователь "период-напряжение" 13, третий фильтр нижних частот 14, множительное устройство 15, второй индикатор 16.
Устройство работает следующим образом.
Радиоимульсы передатчика 2 через антенный коммутатор 3 поступают в антенну 1. Отраженный морской поверхностью радиосигнал принимается антенной 1 и через антенный коммутатор 3 поступает на приемник 4. Принятый и усиленный сигнал поступает на детектор огибающей 5. С его выхода напряжение огибающей отраженного сигнала подается на центрирующее устройство 8 и на второй фильтр нижних частот 6, который выделяет среднее значение напряжения огибающей. Напряжение, пропорциональное среднему значению, поступает в блок автоматической регулировки усиления 7, обеспечивающий стабилизацию среднего значения огибающей сигнала. При этом величина среднеквадратичного значения напряжения на выходе детектора 5 будет пропорциональна величине коэффициента вариации огибающей отраженного сигнала.
Измерение среднеквадратического значения отклонений огибающей сигнала, прошедшего через систему с АРУ, производится путем подачи центрированного сигнала с выхода центрирующего устройства 8 на квадратор 9, а затем на первый фильтр нижних частот 10. Напряжение с выхода первого фильтра нижних частот 10 подается на индикатор 11, который выполняет операцию извлечения квадратного корня и проградуирован в значениях величины Н3%, где Н3% высота морских волн 3% обеспеченности.
С выхода центрирующего устройства 8 напряжение центрированного сигнала поступает также на вход канала измерения средней длины и направления распространения морских волн. Компаратор нулевого уровня 12, стоящий на входе канала, вырабатывает импульсы в момент равенства центрированного сигнала нулю. Эта последовательность импульсов поступает на вход преобразователя "период-напряжение" 13, выходное напряжение которого усредняется третьим фильтром нижних частот 14 и поступает на вход 1 множительного устройства 15, на один из входов которого поступает напряжение, пропорциональное скорости полета. С выхода множительного устройства напряжение, пропорциональное средней длине морских волн в направлении полета λср ( θ ) поступает на второй индикатор 16, проградуированный в значениях величины λср
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1984 |
|
SU1240169A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
SU1825092A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С ЛЕТАТЕЛЬНОГО АППАРАТА | 1994 |
|
RU2104563C1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| Устройство для измерения параметров морских волн | 1977 |
|
SU726422A1 |
| УСТРОЙСТВО ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ ПОДПОВЕРХНОСТНЫХ СЛОЕВ ПОЧВЫ | 1997 |
|
RU2154845C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ | 1990 |
|
RU2018875C1 |
| Когерентно-импульсное устройство для измерения высоты морских волн | 1977 |
|
SU662888A1 |
| СПОСОБ ИЗМЕРЕНИЯ СТАТИСТИЧЕСКИХ ХАРАКТЕРИСТИК МОРСКОГО ВОЛНЕНИЯ С ЛЕТАТЕЛЬНОГО АППАРАТА | 1992 |
|
RU2012903C1 |
Устройство для измерения параметров морского волнения с летательного аппарата, содержащее, антенный коммутатор, передатчик, приемное устройство, включающее последовательное соединенные приемник, детектор огибающей, центрирующее устройство, квадратор, первый фильтр нижних частот, а также индикатор, при этом выход детектора огибающей через второй фильтр нижних частот и блок автоматической регулировки усиления соединен с входом приемника, отличающееся тем, что, с целью повышения точности определения состояния морской поверхности путем одновременного измерения высоты, длины и направления распространения морских волн, в приемное устройство дополнительно введена цепь, состоящая из последовательно соединенных компаратора нулевого уровня, преобразователя период - напряжение, третьего фильтра нижних частот, множительного устройства и второго индикатора, причем вход компаратора нулевого уровня подключен к выходу центрирующего устройства, а на один из входов множительного устройства поступает с бортового измерителя скорости полета напряжение, пропорциональное этой скорости.
Устройство для измерения параметров морского волнения с летательного аппарата, содержащее, антенный коммутатор, передатчик, приемное устройство, включающее последовательное соединенные приемник, детектор огибающей, центрирующее устройство, квадратор, первый фильтр нижних частот, а также индикатор, при этом выход детектора огибающей через второй фильтр нижних частот и блок автоматической регулировки усиления соединен с входом приемника, отличающееся тем, что, с целью повышения точности определения состояния морской поверхности путем одновременного измерения высоты, длины и направления распространения морских волн, в приемное устройство дополнительно введена цепь, состоящая из последовательно соединенных компаратора нулевого уровня, преобразователя период напряжение, третьего фильтра нижних частот, множительного устройства и второго индикатора, причем вход компаратора нулевого уровня подключен к выходу центрирующего устройства, а на один из входов множительного устройства поступает с бортового измерителя скорости полета напряжение, пропорциональное этой скорости.
