(54) ГИДРАВЛИЧЕСКИЙ ПРИВОД СУДОВОЙ РУЛЕВОЙ МАШИНЫ

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод судовой рулевой машины | 1984 |
|
SU1197939A1 |
| Гидравлический привод судовой рулевой машины | 1983 |
|
SU1109337A1 |
| Судовая рулевая машина | 1979 |
|
SU839861A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1105392A1 |
| Гидравлическая рулевая машина | 1978 |
|
SU713770A1 |
| Нагружающее устройство для испытанияРулЕВыХ МАшиН | 1979 |
|
SU844482A1 |
| Гидравлическая рулевая машина | 1982 |
|
SU1126497A1 |
| Нагружающее устройство для испы-ТАНия СудОВыХ РулЕВыХ МАшиН | 1979 |
|
SU852720A1 |
| Гидравлическая рулевая машина | 1980 |
|
SU895810A1 |
| Гидравлический привод судовой рулевой машины | 1980 |
|
SU937268A1 |
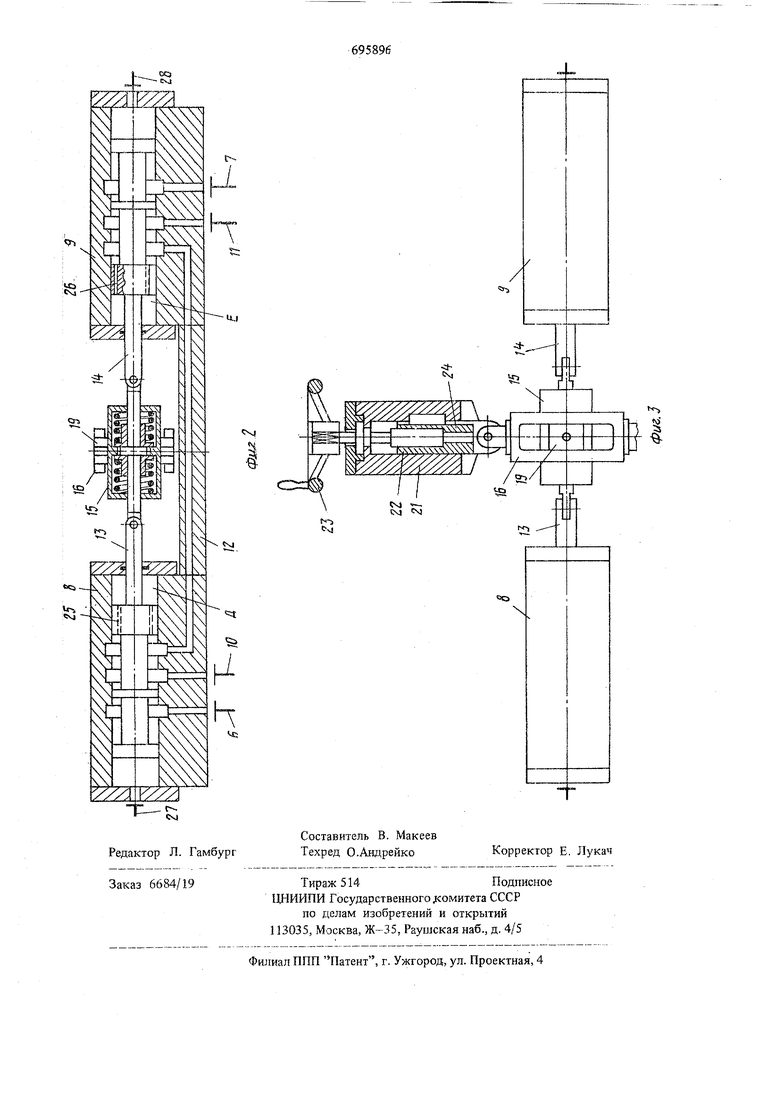
Изобретение относится к судостроению, в частности к гидравлическим приводам судовой рулевой машины. Известен гидравлический привод «судовой рулевой машины, содержащий силовой исполнительный механизм с несколькими рабочими камерами, гидравлически связанными между собой посредством трехпозиционного распределителя с золотником и штоковой полостью 1 В известном гидравлическом приводе, ступенчатое регулирование скорости перекладки осуществляется в зависимости от нагрузки на руле через трехпозиционный распределитель. Переключение ступеней может осуществляться на любом угле перекладки руля при повышении давления в напорной магистрали, в том числе вызванного увеличением нагрузки на руле при разгоне привода, ударным воздействием волны и т.д. Управление приводом по давлению требует использования сложного по конструкции трехпозиционного распределителя, поэтому известный привод ненадежен в работе. Целью изобретения является повышение надежности работы привода. Для этого он снабжен дополнительным трехпозицион1с.1м распределителем с золотником и штоковыми полостями, пружинным нульустановителем, рычагом с механизмом регулирования его оси качания и регулируемой тягой, а золотники трехпозиционных распределителей выполнены с демпфирующими отверстиями, соединяющими ппоковые полости упоМ5шутых распределителей со всасывающей магистралью насоса и рабочими камерами, причем золотники трехпозищюнных распределителей кинематически связаны посредством пружинного нуль-установителя, рычага и регулируемой тяги с баллером руля. Кроме того, механизм регулирования оси качания рычага выполнен в виде пары винт-гайка, причем винт имеет рукоятку, а гайка связана с осью качания pi-i4ara. На фиг. 1 изображена общая схема гидравлического привода; на фиг. 2 - продольный разрез трехпозищюнного распределителя; на фиг. 3 - механизм регулирования оси 1 :ачания рычага. Гидравлический привод содержит испопки1еяьный механизм, имеющий дпа цилиид| а I, 2, 3 и поршни 4, 5, жестко закрепленные в щшиндрах и подвижно установленные в расточках плунжера. . плунжер и пороши образуют- 4 рабочие кал-.еоы. Внутренние камеры А, Б соедшгепы ipyCicnpo водами 6, 7 с нагнетающей и всасьгваюп ей магистралями насоса (не обозначен) и к папаном кольцеван1-ш:, включающим трехпозицио 1ный расгфеделитель 8 и дополнительный трехпозицион№1Й распределитель 9. Наружные кол цевые камеры В, Г соединены трубопронодами 10, 11 с распределителями 8, 9, котс-рые связаны между собой трубопроводом 12. Золотники 13, 14 распределителей кннематамески связаны через иружшшьгй нуль-установитель 15, рычаг. 16 и регулируемую тягу 17 с баллером 18. Нуль-устаиовнтсль взаимодействует посредством подвижных сухарей 19 с рычагом 16, имеющим мехшп{зм 20 рехулирования оси eio качаяня. Механизм 20 состоит из 21 и винтовой нарЫ; винт 22 которой имеет рукоятку 23, а гайка 24 установ лена на оси рычага 16. Золотники 13, 14 им ют демпф1фующие отверстия 25, 26. соедштяю щие штоковые полости Д к Е с нагнетающей и сливной магистра;шми или камерами В и Г привода. УтечкИ рабочей жццкости кыпощ лся из распределителей через трубопроводы 27/28. Работа гвдравлического пргшода при перекладке руля из нулевого в крайнее правое положение и обратно происходит в следующей последовательности. При угле поворота равном нулю золотнпки 13, 14 находятся в среднем положении, сообщая камерь В, Г между собой трубинроводами .lOj И, 12. Рабочая жидкость от насоса поступает во внутреннюю камер Л и сливается из камеры Б. Баллер 8 повар ачивается с повышенной угловой скоростью против часовой стрелки, воздействуя через регулируемую тягу 17, рычаг 16, сухарь 19 и нуль-устаковнтель 15 на золотники 13, I;-, которые передвигаются вправо. Масло из камеры Г переливается в камеру Е. через трубопроводь 10, 11, 12 и распределители 8, 9, при этом давление рабочей жидкости в упомянутом контуре близко к нулю. По мере движения золотника 14 вправо, давление в полостях распределителя 9, сообщенных с трубопроводом 11, начинает возрастать из-за дросселирования .рабочей жвдкости, поступающ в него из полости Г. За счет усшп1я, развиваемого на золотнике 14, сжимаются пружш{ы нуль-установителя 15 и происходит перекдиоче6цние золотников 13, 14 в крайнее нравое положение, при этом кольцевая камера В привода соеддагается с нагнетающей магистралью трубопроводами 6, 10, а камера Г - со всасывающей (сливной) магистралью трубопроводами 7, 11. Плунжер 3 перемещается с лонижещюй скоростью, развивая в крайнем правом положении максимальный крутящий момент на баллере 18. При своем вращении баллер 18 выводит нуль-установитель 15 посредством тяги 17 и рычага 16 в- нулевое положение, при котором гго пружины не сжаты. При обратном вращении баллера с пониженной скоростью из крайнего правого положения снимаются до упора пружины нуль-установителя 1.5, золотники 13, 14 остаются з крайнем правом положении за счет усилия, развиваемого на золотнике 14 давлением всасыван 1я в щтоковой полости раснределителя 9. После того, как прркины ш/ль-установителя сжаты до упора начинается движение золот1Шков 13. 14. В момент, когда всасьи ающая магистраль (трубопровод 7) отсоединяется золотником 14 от кольцевой камеры Г (трубопровода И), давление в штоковых полостях распределителей 8 И 9 уменьщается до нуля и золотники 13, 14 под действием пружины нуль-установителя 15 переключаются, соедшшя кольцевые камеры В, Г. Плунжер 3 перемещается с повыщенной скоростью. По достижении баллером 8 нулевого положения золотншси 13, 14 выводятся в среднее положение. Аналогичным образом ггроисходит работа 1фИБОда при перекладке баллера из нулевого в краГшее левое положение и обратно. Золотннк 14 при этом занимает крайнее левое положение. Механизм 20 предназначен для передвижения оси качания рычага 16 в положение, при котором переключение привода баллера 18 с повыщенной угловой скорости вращения на понюкенную происходит при максимальной загрузке BJiytренних к;.ep А, Б по давлению рабочей жидкости, Для этой цепи Mira 17 выполнена регулируемой. Регулирование оси качания рычага 16 и тяги 17 производится по заданной или полученной при наг)фных испьгтаниях характеристике крутящего момента на баллере в зависимости от угла перекладки руля. Формула изобретения 1. Гидравлический привод судовой рулевой маш1шь, содержащий силовой исполнительный механизм с несколькими рабочими камерами, гвдравлически связанными между собой посредством трехпозищюнного распределителя с золотником и щтоковыми полостями и соединеш ых с насосом, о т л и ч а ю щ и йс я тем, что, с целью повышения надежности работы привода, он снабжен дополнительным трехпозиционным распределителем с золотником и штоковыми полостями, пружшпшм нуль-установителем, рычагом с механизмом регулирования его оси качания и регулируемой тягой, а золотники трехпозиционных распределителей выполнены с демпфирующими отверстиями, соединяющими штоковые полости упомянутых распределителей со всасывающей магистралью насоса и рабочими камерами, причем золотники трехпозиционных распределителей кинемат{гчески связаны посредством пружинного нуль-установителл, рычага и регулируемой тяги с баллером руля.
Источн1пси 1щформации, пр1шятые во внимание при экспертизе 1. Авторское свидетельство СССР N 540769, кл. В 63 Н 25/30, 1974.
