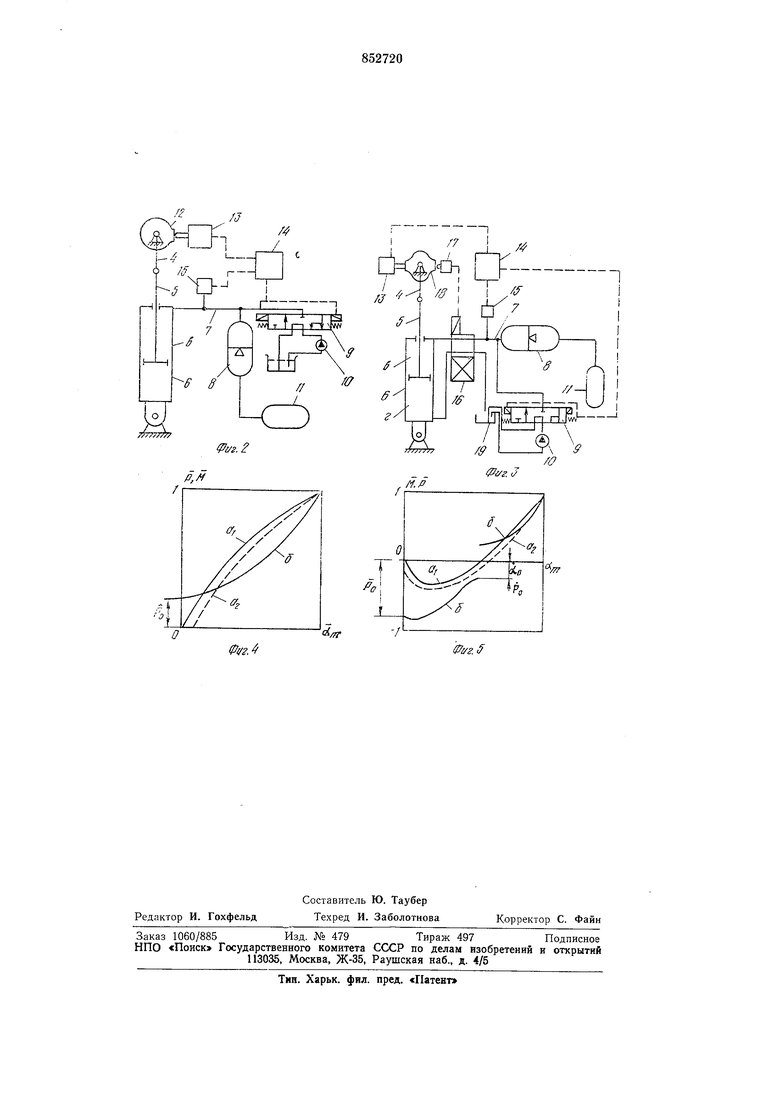
фики ai, 02 и б зависимостей давления в полостях гидроцилиндра P-f(a) и момента на баллере (a) для балансирных рулей и поворотных насадок. Нагружающее устройство в первом варианте исполнения (фиг. 1 и 2) содержит фальшбаллер /, связанный, с одной стороны, румлелем 2 и иопол.нительным механизмом испытываемой рулевой маши.ны, а с другой - рычагом 4 со штоком 5 качающего нагружающего гидроцилиндра 6, штоковая полость в которого нагнетающей магистралью 7 (фиг. 2) гидравлически соединена с пневмогидроаккумулятором 8. Гидравл.ическая полость пневмогидроаккумулятора 8 через трехпоз ционный распределитель 9 соединена со вспомогательным насосом 10, а газовая полость - с источником сжатого газа 11. На фальшбаллере 1 .установлен копир 12, взаимодействующий со считывающим механизмом 13, соединенным по мостовой схеме в управляющем устройстве 14 с датчиком давления 15, установленным В нагнетающей магистрали 7, :Прн этом управляющее устройство 14 электрически связано с электромагнитами распределителя 9. Нагружающее устройство во втором варианте исполнения (фиг. 1 и 3) содержит двухлозиционный .распределитель 16 с электромагнитным управлением от конечного выключателя 17, взаимодействующего с дополнительным Копиром .18, установленным на фальшбаллере 1. Распределитель 16 установлен таким образом, что его входы соединены с поршневой г и штоковой в полостями гидроциляндра 6, один вход связан нагнетающей магистралью 7 с пневмогидроаккумулятором, а другой вход - со сли.вом в бак 19. Работа первого варианта нагружающего устройства (фиг. 1, 2 и 4) при перекладке руля из нулевого положения на правый борт и обратно осуществляется в следующей последовательности. При нулевом положении руля включается вспомогательный насос 10, а считываюоу ло щии механизм М и управляющее устройство 14 совместно с датчиком давления 15 электрически настраиваются таким образом, чтобы насос 10 через распределитель 9 и источник газа Л обеспечили требуемое давление (Ро) в пневмогидроаккумуляторе 5. Соотношения объемом газовой полости пневмогидроаккумулятора 8 и штоковой полости гидроцилиндра 6 выбираются таким образом, чтобы при данном значении РО и кинематической схеме нагружающего устройства обеспечивались изображенные на фиг. 4 графики зависимостей Р /(а) и M f(a). Затем включается в работу исполнительный механизм 3 рулевой -машины, работающий в моторном режиме, и через румпель 2, фальшбаллер / и рычаг 4 осуществляет выдвижение щтока 5, который вытесняет рабочую жидкость из полости в в пневмогидроаккумулятор 8. Происходит увеличение давления рабочей жидкости в полости гидроцилиндра, изменение которого со.ответствует графику б на фиг. 4. При этом зависимость М /(а) соответствует графику. Расхождение между реальной зависимостью Р /(а) от изображенной на фиг. 4 графиком б, которое может возникнуть в случае изменения температурного режима испытаний, неточностей изготовления и монтажа нагружающего устройства и т. д., регистрируется датчи-ком давления 16. Сигнал датчика давления сравнивается в управляю щем устройстве М с сигналом считывающего механизма 13, соответствующем заданной зависимости Р /(а) на фиг. 4. Если давление в гидроцилиндре меньше требуемого значения, то управляющее устройство подает сигнал на левый электромагнит распределителя 9, который подключает гидравлическую полость пневмогидроаккумулятора к вспомогательному насосу 10, восстанавливающему требуемое равновесие сигналов датчика /5 и механизма М. Если давление в гидроцилиндре больше требуемого значения, то управляющее устройство вырабатывает сигнал на стравливание рабочей жидкости из пневмогидроаккумулятора в бак. Таким образом нагружающее устройство потребляет энергию только на компенсацию расхождения реальной и расчетной зависимостей (a), которое при соответствующей настройке его элементов составляет - 0,5-1%. При обратной перекладке руля гидроцилиндр 6 работает в насосном режиме и питается от пневмогидроаккумулятора 8 при аналогичном взаимодействии названных выше элементов нагружающего устройства. Зависимость М f(a) соответствует при обратной иерекладке графику ОгРабота нагружающего устройства, показанного на фиг. .2, при перекладке руля из нулевого положения на левый борт и обратно осуществляется в аналогичной последовательности. Работа второго варианта нагружающего устройства (фиг. 1, 3, 5) осуществляется при аналогичном взаимодействии датчика давления 15, считывающего механизма 13 через устройство управления 14 с трехпозиционным распределителем 9. При перекладке руля из нулевого полол ;ения на правый борт конечный выключатель 17 взаимодействует с копиром 18 таким образом, что пневмогидроаккумулятор 8 гидравлически связан через распределитель 16 с полостью г гидроцилиндра 6, который в диапазоне углов а €() работает в моторном режиме. Пневмогидроаккумулятор -8 разряжается, изменяя давление рабочей жидкости В лолости е от значения РО до Рчй в соответствии с графиком б на фиг. 5. При угле перекладки а оо, копир 18 и -выключатель осуществляют переключение вентиля 16 в положение, три котором лневмогидроаккумулятор 8 соединяется с полостью в 1И гидроцилиндр 6 работает в насосном режиме, заряжая пневмогидроаккумулятор 8. Давление в полости в гидроцилиндра изменяется в пределах от Ра.0 до Р 1, обеспечивающих требуемую зависимость момента на баллере М f{a), представленную на фиг. 5 графи-ком О. Соотношение объемов газовой полости пневмогидроаккумулятора и и полостей г, в гидррцилиндра определяется соотнощениями
PofPoLo и 1/Рао. Значение Росо берется из учета ком1пенсации механических потерь в гидроцилиндре 6, механической передаче между .поршнем 5 и рычагом 4 подшипника баллера.
Работа Второго варианта нагружающего устройства при перекладке с правого борта в нулевое положение осуществляется в обратной последовательности, а при перекладке из нулевого положения на левый борт и обратно-аналогично описанному выше.
Гидроцилиндр 6 в моторном режиме ра,боты сливает рабочую жидкость из полости и в бак , а при насосном режиме возвращает то же ее количество в пневмогидроаккумулятор 8, заряжая его.
Формула изобретения
1. Нагружающее устройство для испытания судовых рулевых мащин, содержащее
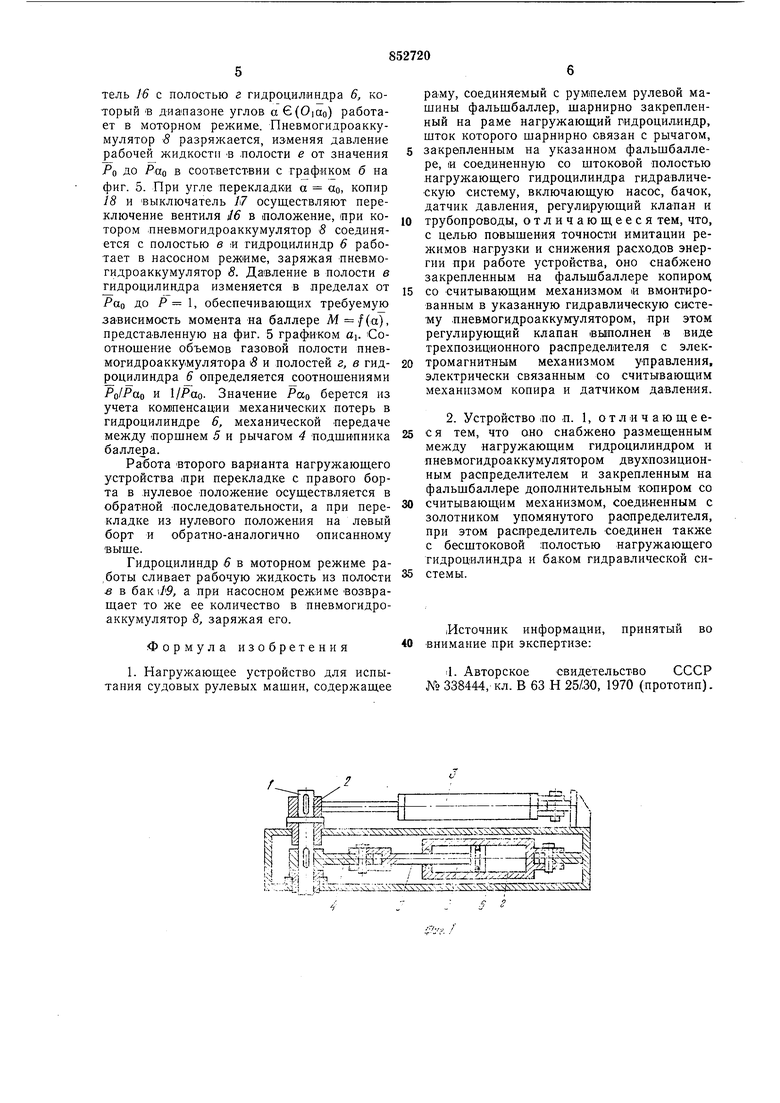
раму, соединяемый с румпелем рулевой машины фальшбаллер, шарнирно закрепленный на раме нагружающий гидроцилиндр, шток которого щарнирно связан с рычагом, закрепленным на указанном фальшбаллере, и соединенную со штоковой полостью нагружающего гидроцилиндра гидравлическую систему, включающую насос, бачок, датчик давления, регулирующий клапан и
трубопроводы, отличающееся тем, что, с целью повышения точности имитации режимов нагрузки и снижения расходов энергии при работе устройства, оно снабжено закрепленным на фальшбаллере копиром
со считывающим механизмом и вмонтированным в указанную гидравлическую систему пне&могидроаккумулятором, при этом регулирующий клапан выполнен в виде трехпозЕционного распределителя с электромагнитным механизмом управления, электрически связанным со считывающим механизмом копира и датчиком давления.
2. Устройство по п. 1, отличающеес я тем, что оно снабжено размещенным
между нагружающим гидроцилиндром и
пневмогидроаккумулятором двухпозиционным распределителем и закрепленным на
фальщбаллере дополнительным копиром со
считывающим механизмом, соединенным с
золотником упомянутого распределителя,
при этом распределитель соединен также
с бесштоковой полостью нагружающего
тидроцилиндра и баком гидравлической системы.
Источник информации, принятый во 40 внимание при экспертизе:
1. Авторское свидетельство СССР N 338444, кл. В 63 Н 25/.30, 1970 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Нагружающее устройство для испытанияРулЕВыХ МАшиН | 1979 |
|
SU844482A1 |
| Нагружающее устройство для испытания рулевых машин | 1981 |
|
SU988660A1 |
| Нагружающее устройство для испы-ТАНия РулЕВыХ МАшиН | 1979 |
|
SU796085A1 |
| Нагружающее устройство для испытания рулевых машин | 1983 |
|
SU1129126A1 |
| Нагружающее устройство для испытания рулевых машин | 1981 |
|
SU988661A1 |
| Нагружающее устройство для испытания гидравлических рулевых машин | 1980 |
|
SU910494A1 |
| Нагружающее устройство для испытания судовой рулевой машины | 1983 |
|
SU1111936A1 |
| Нагружающее устройство для испытания рулевых машин | 1980 |
|
SU893727A1 |
| Нагружающее устройство для испытания рулевых машин | 1984 |
|
SU1197940A1 |
| Нагружающее устройство для испы-ТАНия РулЕВыХ МАшиН | 1979 |
|
SU796084A1 |
/3
f4
-I
j / т ftp гЧ Ш
8
1/г.2
/7
/4
П
1 ,/
Й I
er
I /ff
ff /ff
P,M
уг.
г/г.
fi.P
IPffZ.f
