ЙаоВретеиие относится к подъемно- транспортному машиностроению.
Известеи способ контроля положения колес крана, при котором на измерительном участке рельсового пути к каждому колесу прижимают линейку измерительного прибора и с помощью лучей определяют углы взаимного положения плоскостей колес
Известен также способ контроля положения колес крана, при котором на измерительном участкерельсового пути к каждому колесу симметрично его вертикальной оси симметрии прижимают линейку измерительного прибора, фиксируют в нем положение плоскости колеса и с помощью лучей смежных измерительных приборов определяют углы взаимного положения плоскостей колес L 2 1 .
Недостатком известных способов является сравнительно низкая точность контроля и значительное время простоя крана.
Последний способ является наиболее близким к описываемому изобретению по технической сущности и достигаемому ре зультату. Способ осуществляют устройством для контроля положения колес крана, содержащим измерительный прибор с ли нейкой и штангой со щкалой 2,
Целью изобретения является повыщение точности контроля и уменьшение времени простоя крана.
Указаннаяцель достигается тем, что измеряют ширину/колес, а после фиксации в измерительных приборах положения плоскостей колес, .линейки измерительных приборов отводят от колес и убирают кран с измерительного участка рельсового пути, затем восстанавливают первоначальное положение линеек измерительных приборов и определяют точки проекции центров колес на рельсы, а, лучи проводят между смежными точками проекций центров колес на релдюы.
Такой способ может быть осуществлен устройством новой конструкции, отличия
которого заключаются в том, что оно снабжено рычагом с прорезью и BHrjTov, упором, направляющей с винтом, в кото-рой BaKperiJieFJ KOiUm штанси, паконочиикс/м со шкалой, пластинами с болтом кота.-. рые смонтированы на втором штаиги и в которых шарнирио укреплен наконечник, основанием, на котором шарнизно закреплен рычаг с прорезью и установлен упор, а также плитой со шкалой, спинкой и болтами, подвижной платфорК1ОЙ с прорезями, смонтированной на пли- Te и осью для крепления лазерного устроства и экрана, установленной в uoFiTpe плиты, при этом линейка выполнена с про резями и укреплена на наконечнике.
Способ и устройство для era осущест вления поясняются чертежом.
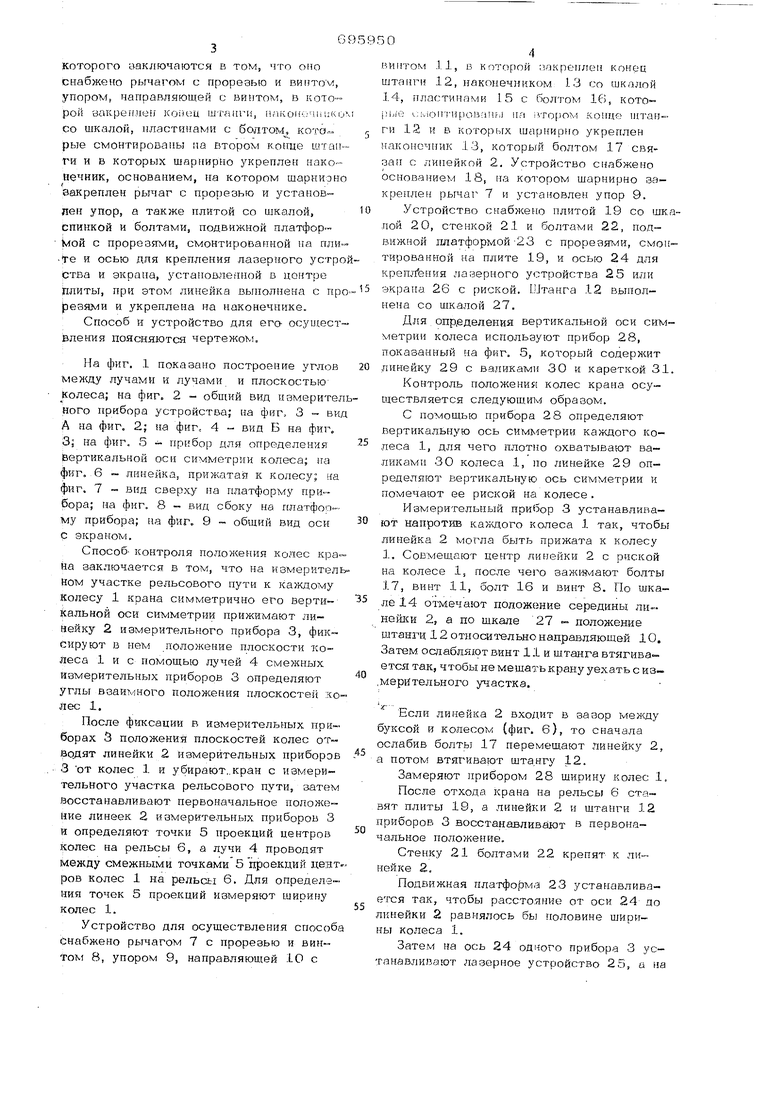
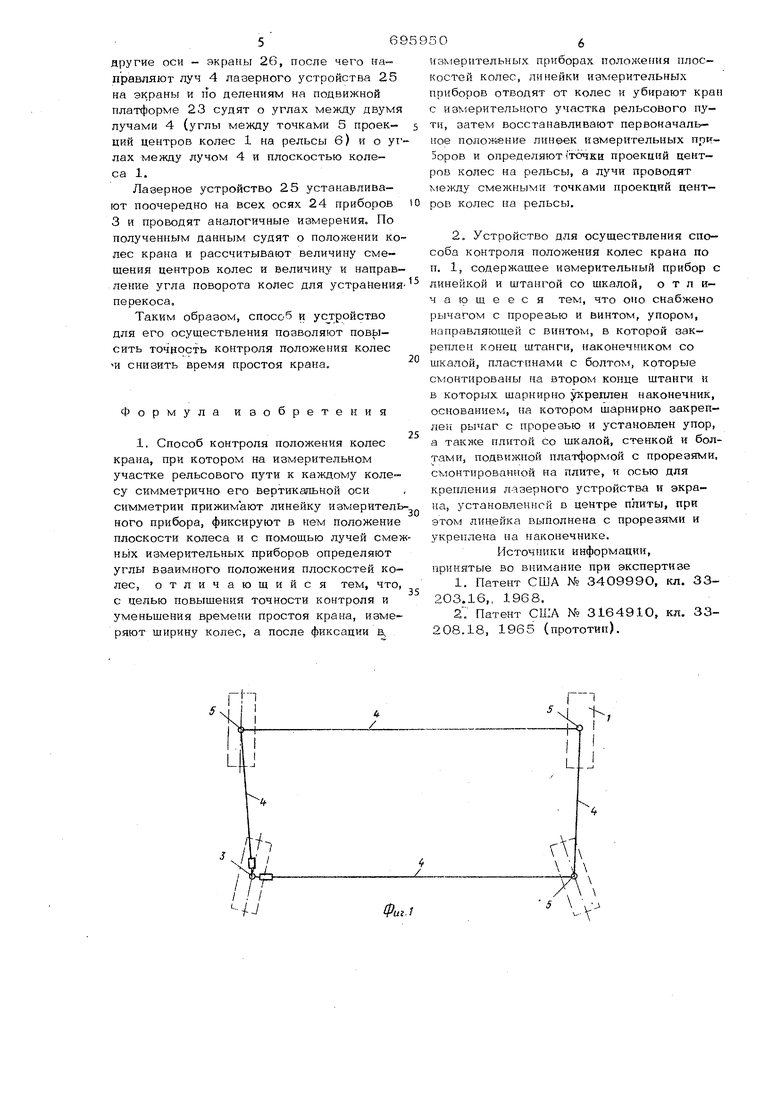
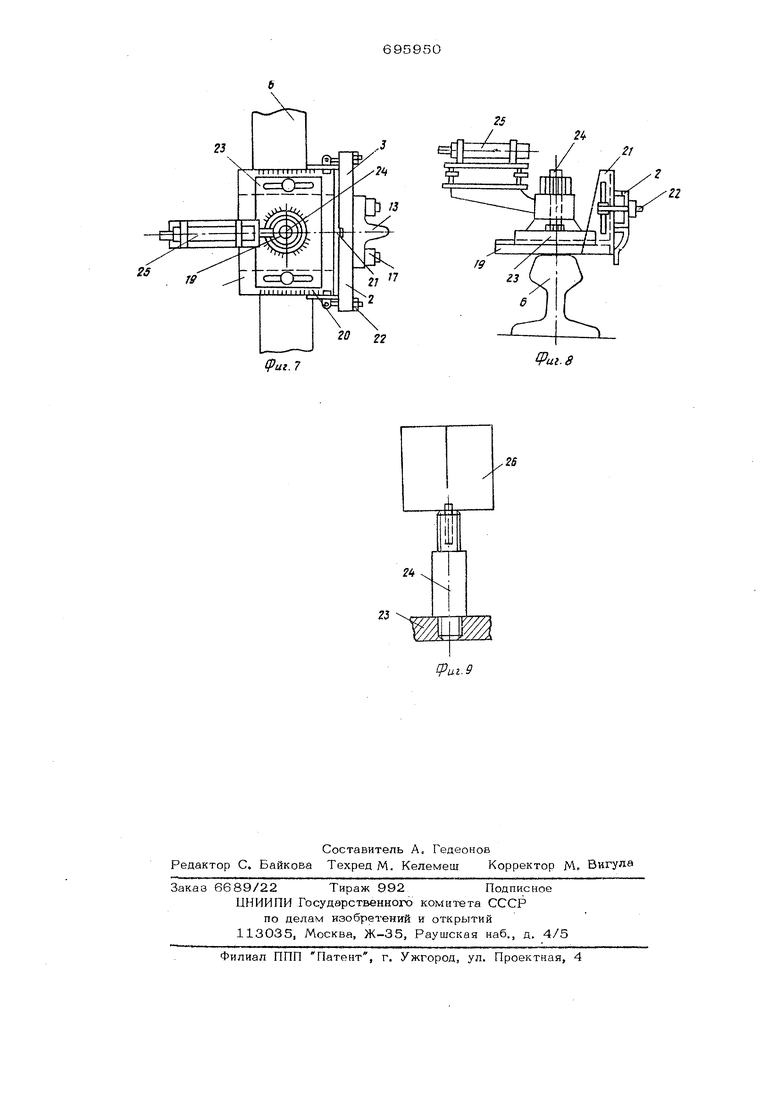
На фиг. 1 показано построение углов менаду лучами и лучами и плоскостью Колеса; на фиг. 2 - общий вид измерителного прибора устройства; на фиг, 3 - вид А на фиг, 2; на фиг, 4 - вид Б на фиг, 3; на фиг. 5 прибор для определения Вертикальной оси симметрии колеса; на фиг. 6 линейка, прижатая к колесу; на фиг. 7 - вид сверху на платформу прибора; на фиг. 8 - вид сбоку на платфоому прибора; на фиг. 9 - общий вид оси с экраном.
Способ контроля положения колес крана заключается в том, что на измерит1эль Ном участке рельсового пути к каждому колесу 1 крана симметрично его вертибальной оси симметрии прижимают линейку 2 измерительного прибора 3, фиксируют в нем положение плоскости колеса 1 и с помощью лучей 4 смежных Измерительных приборов 3 определяют
углы взаимного положения плоскостей хо лес 1.
После фиксации в измерительных приборах 3 положения плоскостей колес отводят линейки 2 измерительных приборов 3 от колес 1 и убирают,.кран с измерительного участка рельсового пути, затем восстанавливают первоначальное положение линеек 2 измерительных приборов 3 и определяют точки 5 проекций центров колес на рельсы 6, а лучи 4 проводят между смежными точками 5 проекций центров колес 1 на рельсы 6. Для определения точек 5 проекций измеряют ширину колес 1.
Устройство для осуществления способа снабжено рычагом 7 с прорезью и винТом 8, упором 9, направляюи1ей 10 с
винтом .11, в Которой закреплен конец штанги 12, паконечником 13 со шкалой J.4, пластинами 15 с болтом 16, кото n,ie .: vioiiTHpoB-:ii.hi на ivrofiOM конце штанги 1.Э и в которых шарнирно укреплен наконечник 13, который болтом 17 связан с линейкой 2. Устройство снабжено основанием 18, на котором шарнирно закреплен рыча 7 и успановлен упор 9.
Устройство снабжено плитой 19 со шклой 20, стенкой 21 и болтами 22, подвижной хшатформой-23 с прорезями, смонтированной на плите 19, и осью 24 для крепления лазерного устройства 25 или экрана 26 с риской. .Утанга 12 выполнена со шкалой 27.
Для определения вертикальной оси симметрии колеса используют прибор 28, показанный на фиг. 5, который содержит линейку 29 с ва.ликамн ЗО и кареткой 31
Контроль положения колес крана осундествляется следующим образом.
С помощью прибора 28 определяют вертикальную ось симметрии каждого колеса 1, для чего плотно охватывают ва- .ликами 30 колеса 1, по линейке 29 определяют вертикальную ось симметрии и помечают ее риской на колесе .
Измерительный прибор 3 устанавливают напротив каждого колеса 1 так, чтобы линейка 2 могла быть прижата к колесу 1. Совмещают центр линейки 2 с риской на колесе 1, после чего зажгаиают болты 17, винт 11, болт 16 и винт 8. По шкале 14 отмечают положение середины ли- неШси 2, а по щкале 27 - положение штанги 12 относительно направляющей 10. Затем ослабляют винт 11 и штанга втягивается так, чтобы не мешать крану уехать с из,мерительного участка.
Если линейка 2 входит в зазор между буксой и колесом (фиг. 6), то сначала ослабив болты 17 перемещают линейку 2, а потом втягивают штангу 12.
Замеряют прибором 28 ширину колес 1
После отхода крана на рельсы 6 ставят плиты 19, а линейки 2 и штанги 12 приборов 3 восстанавливают в первоначальное положение.
Стенку 21 болтами 22 крепят к линейке 2.
Подвижная nna-r o Mi 23 устанавливается так, чтобы рассто.яние от оси 24 до лкнейки 2 равнялось бы половине ширины колеса 1.
Затем на ось 24 одного прибора 3 устанавливают лазерное устройство 25, а н 56 другие оси - экраны 26, после чего направляют луч 4 лазерного устройства 25 на экраны и по делениям на подвижной платформе 23 судят о углах между двум лучами 4 (углы между точками 5 проекций центров колес 1 на рельсы 6) и о y лах между лучом 4 и плоскостью колеса 1. Лазерное устройство 25 устанавливают поочередно на всех осях 24 приборов 3 и проводят аналогичные измерения. По полученным данным судят о положении ко лес крана и рассчитывают величину смещения центров колес и величину и направ ление угла поворота колес для устранени перекоса. Таким образом, способ и устройство для его осуществления позволяют повысить точность контроля положения колес и снизить время простоя крана. Формула изобретения 1. Способ контроля положения колес крана, при котором на измерительном участке рельсового пути к каждому колесу симметрично его вертикальной оси симметрии прижимают линейку измерител ного прибора, фиксируют в нем положение плоскости колеса и с помощью лучей сме ных измерительных приборов определяют углы взаимного положения плоскостей колес, отличающийся тем, что с целью повышения точности контроля и уменьшения времени простоя крана, измеряют ширину колес, а после фиксации в. 506 измерительных приборах положения плоскостей колес, линейки измерительных приборов отводят от колес и убирают кран с измерительного участка рельсового пути, затем восстанавливают первоначаль - iioe положение линеек измерительных при™ Зоров и определяют «тсгчки проекций центров колес на рельсы, а лучи проводят между смежными точками проекций центров колес на рельсы. 2, Устройство для осуществления способа контроля положения колес крана по п. 1, содержащее измерительный прибор с линейкой и штангой со шкалой, отличающееся тем, что оно снабжено рычагом с прорезью и винтом, упором, направляющей с винтом, в которой закреплен конец штанги, наконечником со шкалой, пластинами с болтом, которые смонтированы на втором конце штанги и в которых шарнирно укреплен наконечник, основанием, на котором щарнирно закреплен рычаг с прорезью и установлен упор, а также плитой со шкалой, стенкой и болтами, подвижной платформой с прорезями, смонтированной на плите, и осью для крепления лазерного устройства и экрана, установленнсй в центре плиты, при этом линейка выполнена с прорезями и укреплена на наконечнике. Источники информации, принятые во внимание при экспертизе 1. Патент США № 34О999О, кл. 33203.16,, 1968, 27 Патент США № 316491О, кл. 33208.18, 1965 (прототип).
Фш.1
8М 6
,/
тг
1
а
Б
|г:
п
-2
LU
J.A
ери,
01
30
/
/8
пх д
фиг. 2
ВидА
Л
11 I I I
.// II
}2
W
г
ч.
г-1
8
1 I I1
.
/Jf
ill 11
,3
20 22
иг.7
25
/2
fe- ./2f
I
S
Vui.8
