I
Изобретение относится к путевым железнодорожным машинам, а именно к выправочным машинам, снабженным оптическими устройствами для контроля выправки железнодорожного пути.
Известны устройства для контроля выправки железнодорожного пути, состоящие из рамки, жестко связанной в рабочем положении с рамой машины, стогк измерительного шитка и ходовых колес, перемещаюшихся по рельсам.
Однако жесткая связь рамки устройства с рамой машины не позволяет контролировать с необходимой стеленью точности величины подъемок и сдвижек пути, особенно, при работе в кривых участках пути из-за наклона стоек измерительного ш,итка и образования острого угла между вертикальной осью и осью измерительного пдитка. Кроме того, в известных устройствах не обеспечивается надежное поджатие реборд ходовых колес к рельсам, что также снижает точность контроля.
С целыб обеспечения при контроле большей степени точности величин сдвижек и подъемок железнодорожного пути рамка устройства выполнена в виде шарнирного параллелограмма, который снабжен подпружиненными штоками, обеспечивающими надежный контакт ходовых колес с рельсами, и поджимаюн.и1м приспособлением, обеспечиваюш,им поджатие реборд ходовых колес к рельсам.
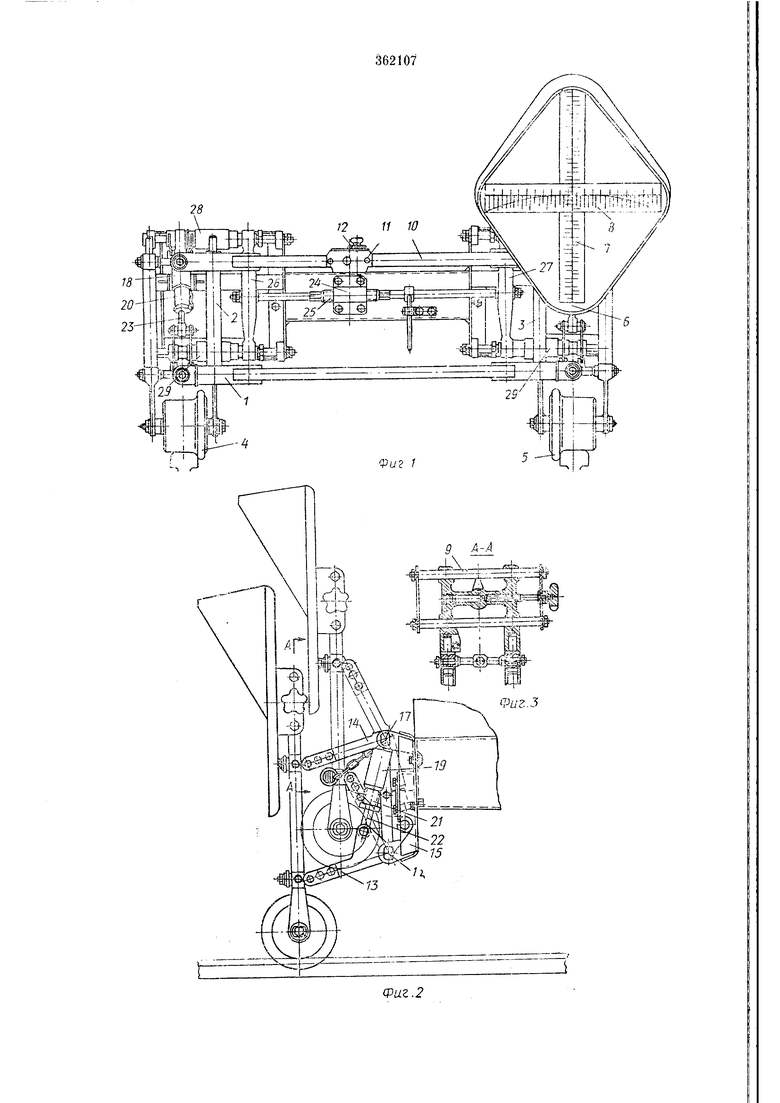
На фиг. 1 изображено устройство, вид спереди; на фиг. 2 - устройство, вид сбоку; на фиг. 3 - разрез по линии А-А на фиг. 2.
Устройство для контроля выправки пути состоит из iLiapiiiipiioro па|)аллелограмма / (рамки), стойки которого 2 }i 3 несут иа себе ребордчатые колеса 4 и 5, съемочный щиток 6 с измерительными линейками 7 и 5 и механизмом перемещения щитка относительно оси контрольной рельсовой нити 9. В верхнюю горизонтальную связь 10 вмонтирован редуктор У/ с электроуровнем. На выходной оси редуктора // установлен отсчетный лимб 12 с делениями, ироградуированны.ми в мм превышения одной рельсовой нити относительно другой. Вертикальные стойки 2 и 3 шарнирного параллелограмма 1 (рамки) посредством двух пар тяг 13 и 14 шариирно креиятся к опорной плите 15, соединенной, в свою очередь, с рамой машины (на чертеже не показана).
Цапфы тяг 13 и 14, расположенные на осях 16 и 17, являются в то же время опорами гильз 18 и 19 с регулировочными полыми винтами 20 и 21 с пружинами, передающими усилие сжатия через штоки 22 и 23 и а тяги 13 и 14. В центре опорной плиты закреплена опормая гайка 24 с винтом 25, соединяющим два коромысла 26 и 27, размещенных на .направляющих осях 16 и 17. Между коромыслом и цапфами тяг 13 и 14 расположены пружинные амортизаторы 28 и 29. Устройство работает следующим образом. Параллелограмм / (рамку) вручную, вращением относительно осей 16 и 17, опорной плиты 15 переводят в нижнее рабочее положение до момента установки ходовых колес 4 и 5 на головки обеих литок пути. При этом пружины гильз 18 и 19 воздействуют на штоки 22 и 23 с силой, зависящей от положения регулировочных винтов 20 и 2J и обеспечивают постоянный контакт ходовых колес с головками рельсовых нитей независимо от положения подъемочной или сдвигающей мащины. Вращением винта 25 относительно гайки 24 обеспечивают поперечное перемещение рамки 1 с помощью коромысла 26 или 27 до момента прижима реборды одного из колес 4 или 5 к внутренней грани головки контрольной рельсовой нити без зазора. Пружинлые амортизаторы 28 и 29 служат для обеспечения дополнительного поджима реборды одного из колес и исключают появление зазора между ребордой и внутренней гранью головки контрольной рельсовой нитки, по которой осуществляют отсчет величии подъемок и сдвижек. В противном случае, при наличии зазора, в величины потребных сдвижек вносилась бы ошибка, равная величине зазора. Съемный щиток 6 устанавливают на вертикальные стойки 2 или 5 и с помощью механизма перемещения щитка 9 передвигают в поперечном направлении относительно пути до момента совпадения оси вертикальной линейки 7 с осью головки контрольной .рельсовой нити. Далее вращением лимба 12 производят установку электроуровня на величину проектного превышения одной рельсовой нити над другой. Оптический прибор типа ПРП (на фиг. пе показан) устанавливают на расстоянии до 150 м от устройства на выправленной точке пути и его луч устанавливают по проектному уклону в вертикальной плоскости и по требуемому углу в горизонтальной плоскости. Возможен вариант, когда машина сдвигает путь в месте своей стоянки на проектную ось и тогда луч прибора настраивается на ось вертикальной линейки 7 съемного щитка 6 и, при выправке участка, расположенного между машиной и прибором, служит копиром для отсчета показаний по подъемке пути и по рихтовке пути. При перемещении машины по участку оператор, стоящий у оптического прибора, следит за положением центра перекрещивания прибора относительно центра перекрещивания измерительных линеек 7 и S. В случае, когда горизонтальная линейка прибора находится выше оси горизонтальной линейки 5 или когда вертикальная линия прибора не совпадает с делением горизонтальной линейки, соответствующим проектной кривизпе выправляемого участка, оператор дает команду на остановку машины. Подъемка и рихтовка контрольной рельсовой нити происходит до момента совпадения центра перекрещивания оптического прибора с горизонтальной линейки и с делением горизонтальной линейки, соответствующим проектной стреле прогиба в данной точке. Команда на подъемку неконтролируемой рельсовой нити подается от электроуровня до момента установки последнего в строго горизонтальное положение. После этого происходит перемещение машины на шаг и цикл повторяется. Предмет изобретения Устройство для контроля выправки железнодорожного пути, содержащее рамку с ходовыми колесами и стойками, несущими измерительные линейки, оптический прибор и опорную плиту, прикрепленную к раме выправочной машины, отличающееся тем, что, с целью повышения степени точности контроля величины подъемок и сдвижек пути, рамка устройства выполнена в виде шарнирного параллелограмма и снабжена подпружиненными штоками, шарнирно соединенными с элементами рамки и опорной плитой, и поджимающим реборды ходовых колес к рельсам приспособлением, состоящим из коромысел и пружинных амортизаторов.