Изобретение относится к подъемно-транспортному машиностроению и предназначено для контроля положения ходовых колес мостовых и козловых кранов при изготовлении и находящихся в эксплуатации.
При эксплуатации мостовых и козловых кранов существует проблема износа их колес и рельсов крановых путей. Согласно ГОСТа 3569-74 срок службы крановых колес составляет от 2 до 9 лет. Однако на практике он гораздо меньше. Основной причиной повышенного износа крановых колес и рельсов крановых путей является недостаточная точность установки, перекос ходовых колес. В процессе эксплуатации крана или после ремонта его металлоконструкций происходит изменение геометрического положения ходовых колес как в вертикальной, так и в горизонтальной плоскостях. При этом величины углов развала и схождения могут выходить за пределы допусков, регламентируемых действующими стандартами.
Известно устройство для контроля положения ходовых колес подъемно-транспортных средств (патент RU 2083468 C1, B66C 9/16, опубл. 10.07.1997), содержащее источник излучения, преимущественно лазер, ось луча которого направлена параллельно оси рельса, и приспособление для измерения угла перекоса ходовых колес. Приспособление для измерения угла перекоса ходовых колес в горизонтальной плоскости выполнено в виде оптической кулисы двойного изображения, способной вращаться в горизонтальной плоскости вокруг оси, перпендикулярной оси колеса. Приспособление для измерения угла перекоса ходовых колес снабжено устройством угловой микрометрической подачи и линейной микрометрической подачи, а также датчиком угловых перемещений и датчиком линейной подачи, которые электрически соединены с блоком индикации. По оси вращения оптической кулисы установлена съемная уголковая призма, грань которой снабжена экраном с маркой, расположенной в фокусе оптического микрометра. Оптический компонент расположен на оси лазерного излучения и оптически связан с лазерным излучателем, содержит аксикон и две отрицательные линзы, фокус ближней из которых совмещен с фокусом аксикона.
В описании работы данного устройства описан способ контроля положения ходовых колес подъемно-транспортных средств. Способ основан на направлении лазерного луча параллельно оси рельса, производят отсчет положения луча на экране. При линейных и ходовых отклонениях ходового колеса от номинального положения фиксируют угловое отклонение ходового колеса в горизонтальной плоскости и картину, характеризующую линейное смещение ходового колеса от оси рельса. Угловое смещение второго контролируемого колеса в вертикальной плоскости определяют с помощью накладного уровня.
Недостатками указанного устройства и способа, описанного в работе данного устройства, являются:
- сложность конструкции;
- имеется существенная погрешность в измерениях, поскольку луч направляется параллельно рельсу и не учитывается направление движения крана;
- перед проведением измерений требуется настройка устройства на колесе, что также снижает точность измерений;
- вероятна погрешность измерений в связи с креном колеса в вертикальной плоскости, поскольку луч устройства проводится на уровне оси вращения колеса.
Наиболее близким техническим решением, выбранным в качестве прототипа для способа и устройства, является устройство для контроля положения ходовых колес подъемно-транспортного средства (патент RU 35328 U1, В66С 9/16, опубл. 10.01.2004), и реализуемый с помощью его способ. Устройство содержит измерительный экран, снабженный прямоугольной системой координат. Измерительный экран посредством магнитного кронштейна устанавливают на одном из пары колес, расположенных на одном рельсе, перпендикулярно его торцевой поверхности. Устройство также содержит источник базового луча, установленный с возможностью пересечения его оптической оси с началом упомянутой системы координат. Источник базового луча посредством другого магнитного кронштейна закреплен на втором контролируемом колесе параллельно его торцевой поверхности. Источник базового луча сконструирован на базе серийно выпускаемого нивелира Н-10кл и приставки лазерной ПЛ-1.
В работе данного устройства описан способ контроля положения ходовых колес подъемно-транспортного средства. Способ заключается в следующем. Измерительный экран с прямоугольной системой координат посредством магнитного кронштейна устанавливают на одном из пары ходовых колес, расположенных на одном рельсе, перпендикулярно его торцевой поверхности. На втором ходовом колесе посредством другого магнитного кронштейна закрепляют источник базового луча, при этом оптическая ось источника расположена параллельно торцевой поверхности этого контролируемого ходового колеса. Включают источник и направляют базовый луч на измерительный экран. Фиксируют отклонение базового луча на прямоугольной системе координат измерительного экрана по вертикальной и горизонтальной осям. Затем перемещают буксы крепления колеса, на котором закреплен источник базового луча, в вертикальной и в горизонтальной плоскости до совмещения световой точки луча с началом прямоугольной системы координат измерительного экрана. После этого измерительный экран и источник базового луча меняют местами. Повторяют операцию и перемещают буксы крепления уже другого контролируемого колеса, на которое установили источник базового луча, до совмещения световой точки базового луча с началом системы координат измерительного экрана, установленного перпендикулярно торцевой поверхности ходового колеса, на которое он установлен. Данную операцию повторяют 2-3 раза.
Однако данное устройство и способ, описанный в работе данного устройства, имеют следующие недостатки:
1. Источник базового луча посредством магнитного кронштейна закреплен на колесе, параллельно его торцевой поверхности. Крепление магнитным кронштейном требует тщательной очистки от частиц пыли, притягиваемых магнитом, что приводит к погрешности измерений, а следовательно, будет низкая точность измерений.
2. Источник базового луча сконструирован на базе нивелира Н10кл. Это означает, что параллельность луча торцевой поверхности колеса регулируется устройствами регулировки (винтами), являющимися составляющими конструкции нивелира, т.е. вручную, что усложняет настройку параллельности и обусловливает ошибки измерений.
3. Применение данного устройства возможно только на кранах с открытой поверхностью колеса. Устройство невозможно закрепить на колесе, наружная (видимая) поверхность которого почти полностью закрыта, а доступна лишь небольшая часть колеса, расположенная непосредственно над рельсом (практически все конструкции импортного производства).
4. Вероятна погрешность измерений в связи с отклонением положения колес по пролету, поскольку с помощью данного устройства производится измерение отклонения луча относительно одного из колес, расположенных на одном рельсе, следовательно, учитывается только отклонение измеряемого колеса относительно общей оси, соединяющей центры двух колес. Но в реальности колеса установлены на разном расстоянии по пролету и общие оси, соединяющие центры колес на разных рельсах, не параллельны между собой (погрешность расстояния возникает при изготовлении, а тем более в процессе эксплуатации).
Технической задачей предлагаемого изобретения является создание способа контроля положения ходовых колес подъемно-транспортного средства и устройства для осуществления этого способа, обеспечивающих повышение точности измерения отклонений колес в горизонтальной плоскости.
Поставленная техническая задача достигается тем, что определяют базовые точки измерений на участке кранового пути, измерение отклонения колеса в горизонтальной плоскости производят на уровне высоты головки рельса путем установки лазерного уровня базовой кромкой основания на торцевую поверхность обода колеса на уровне высоты головки рельса в горизонтальной плоскости, направляют лазерный луч, после чего определяют отклонение каждого колеса в горизонтальной плоскости путем измерения расстояния от базовой точки до луча, при этом при достаточной для точности измерений, величине базы, по меньшей мере, пять метров, для определения отклонения колеса от номинального положения производят измерение расстояния от базовой точки смежного колеса до луча и расстояния между колесами по пролету, затем рассчитывают величину фактического отклонения каждого из колес от проектной по формуле

где Ki - схождение колеса от главной оси X;
Ci - схождение колес от оси X1;
Δx=0,5ΔL - отклонение оси X1 от оси Х (рекомендуемое значение), при этом схождение каждого колеса из пары, расположенной на одном рельсе, рассчитывают по формуле

где ai - измеренное значение схождения;
Н - калибр лазерного уровня (паспортное значение);
В - база крана;
а схождение каждого колеса из пары, расположенной на другом рельсе, рассчитывают по формуле

где ΔL - поправка на отклонение пролета, рассчитываемая по формуле

где L1 - величина пролета между одной парой колес, расположенных на одной оси;
L2 - величина пролета между второй парой колес, расположенных на одной оси,
а при недостаточной для точности измерений величине базы крана (менее пяти метров) для определения отклонения колеса от номинального положения по лучу производят измерение положения колес относительно базовых точек участка кранового пути требуемой длины, от десяти до двадцати метров, отмеченных по пролету, затем рассчитывают величину фактического отклонения каждого из колес от проектной по формуле

где Ki - схождение колеса от главной оси X;
Ci - схождение колеса от оси Z;
Δz - отклонение оси Z от оси X,
при этом схождение колеса от оси Z рассчитывают по формуле

где ai и bi - измеренные значения схождений;
Д - база измерений схождения колес (Д=10…20 м),
отклонение оси Z от оси Х определяют по формуле

где ΔL - поправка на отклонение пролета;
l1 - расстояние от торца одного из колес, расположенных на ближайшем к оси Z рельсе;
l2 - расстояние от торца другого из колес, расположенных на ближайшем к оси Z рельсе;
В - база крана (паспортное значение), при этом поправку на отклонение пролета рассчитывают по формуле

где δL - отклонение пролета;

где Н - калибр лазерного уровня (паспортное значение);
Е - расстояние от вертикальной оси колеса до ближайшей базовой точки в горизонтальной плоскости,

где А - расстояние от колеса до базовой точки.


При этом
базу крана определяют с учетом геометрии и конструкции крана;
- лазерный луч вынесен от торца обода колеса за габариты крана на фиксированное расстояние (калибр).
Для решения поставленной задачи в лазерном уровне для контроля положения ходовых колес подъемно-транспортного средства, содержащем основание, лазерный модуль, включающем лазерный источник и ампулу горизонтального уровня, согласно изобретению, основание выполнено из немагнитного металла из жесткой тонкой пластины с высокой степенью обработки базовой кромки, а закрепленный на основании лазерный модуль содержит лафет, установленный с возможностью поворота относительно основания, при этом на лафете установлен кронштейн, обеспечивающий предварительную регулировку лазерного луча, и винт точной регулировки, установленный между основанием и кронштейном на расстоянии, обеспечивающем возможность поворота лафета, и имеющий две резьбовые поверхности с минимальной разностью шагов.
Параллельность луча относительно базовой кромки регулируют на специальном стенде с периодичностью ~6 месяцев.
Существенными отличительными признаками лазерного уровня для контроля положения ходовых колес подъемно-транспортного средства являются:
- выполнение основания лазерного уровня в виде достаточно жесткой тонкой пластины с узкой и высокой степенью обработки базовой кромки, благодаря которой появляется возможность установки лазерного уровня на торцевую поверхность колеса на уровне высоты головки рельса в горизонтальной плоскости, тем самым исключается погрешность от наклона колеса в вертикальной плоскости и обеспечивается свободный доступ к поверхности колеса для измерений;
- изготовление основания лазерного уровня из немагнитного металла исключает намагничивание частиц пыли и не требует частой очистки, повышает точность измерений;
- лазерный модуль, закрепленный на основании уровня, содержит лафет, выполненный с возможностью юстировки параллельности лазерного луча к базовой кромке основания, кронштейн с пазами для крепления винтами к лафету для предварительной регулировки направления лазерного луча и винт точной регулировки, установленный между основанием и кронштейном на расстоянии, с обеспечением возможность поворота лафета, и имеющий две резьбовые поверхности с минимальной разностью шагов, что увеличивает точность измерения отклонений ходовых колес.
Сущность изобретения поясняется чертежами.
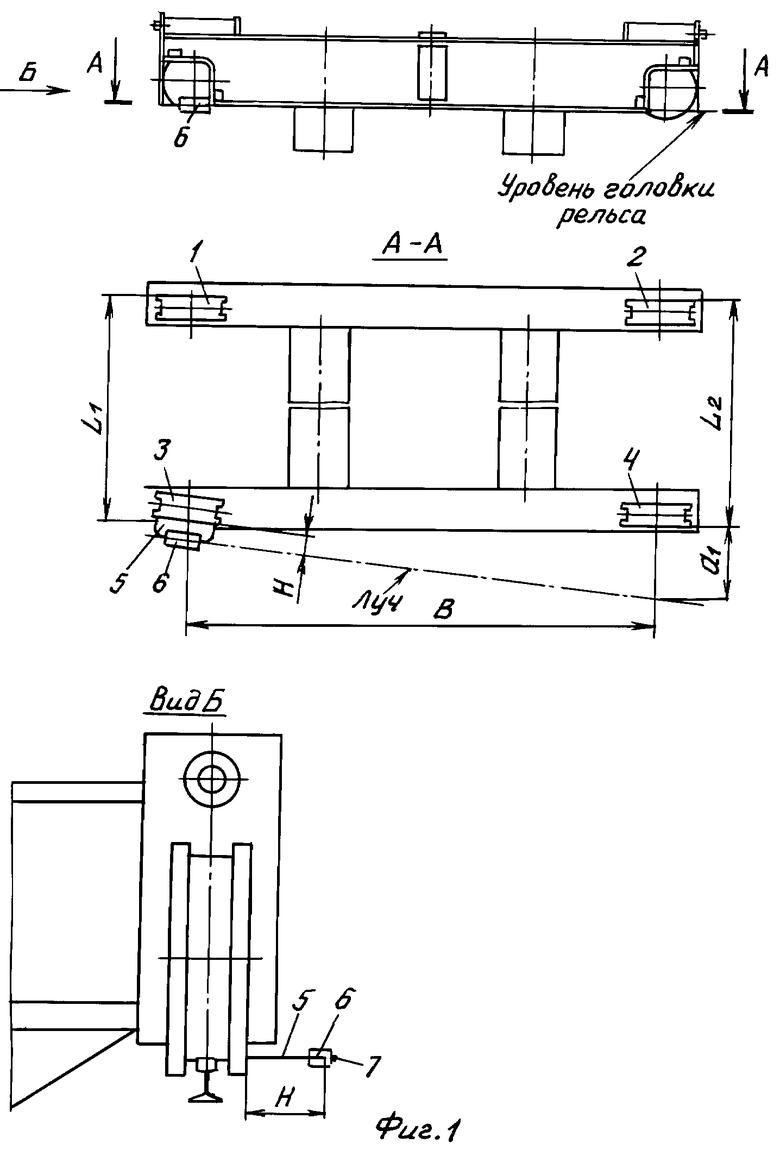
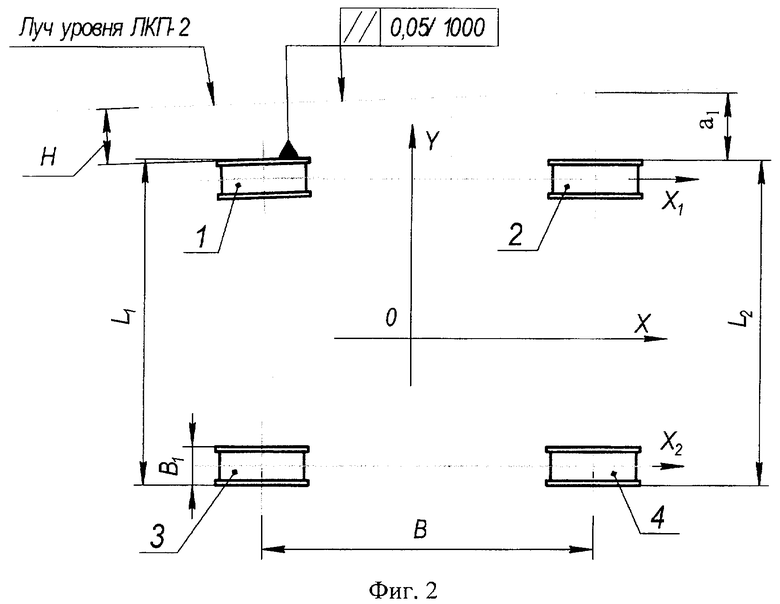
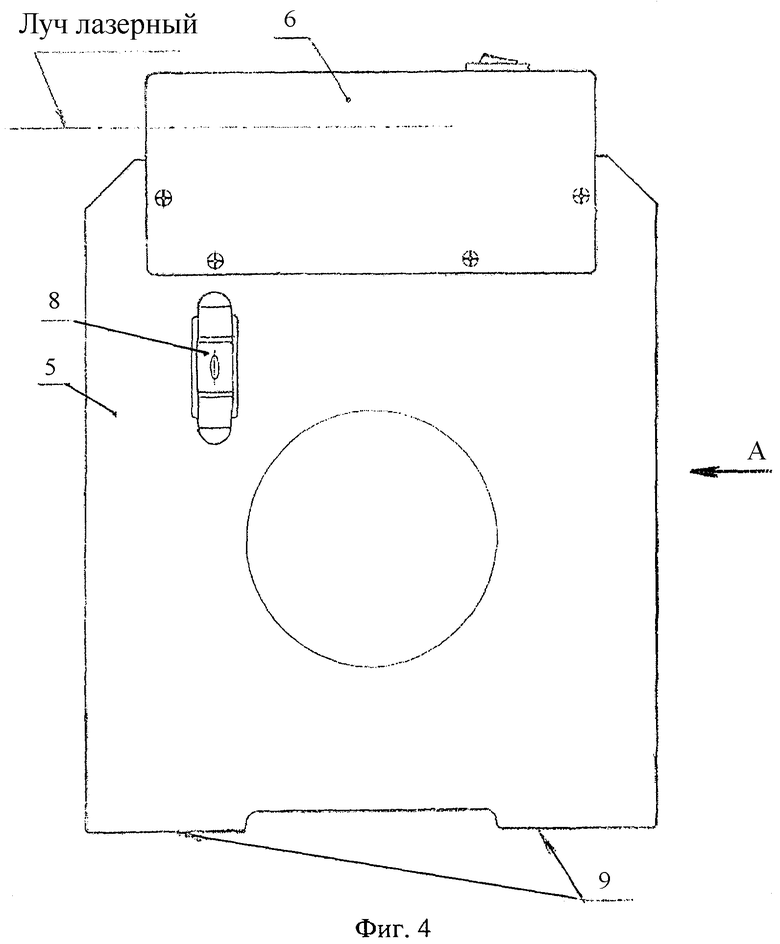
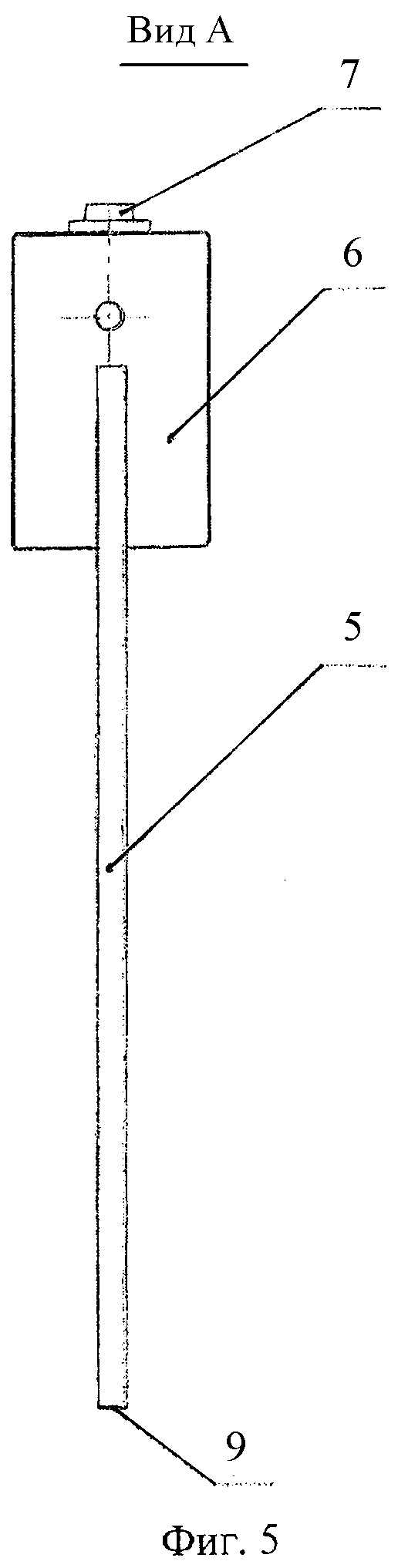
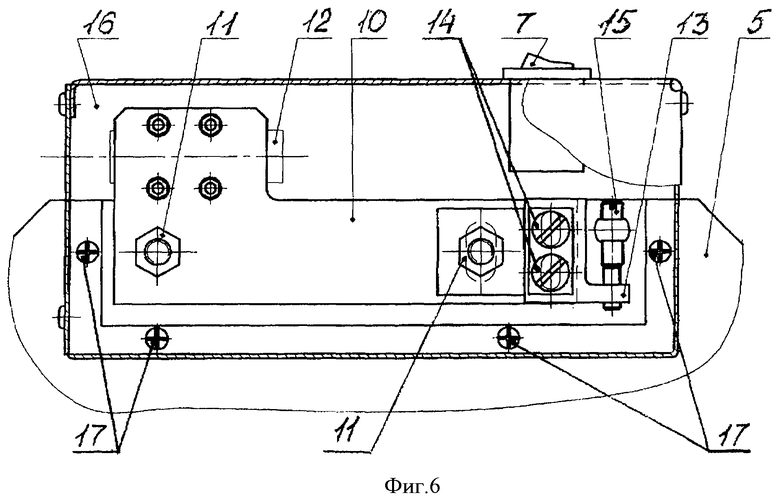
На фиг.1 представлена схема измерений положений крановых колес в горизонтальной плоскости; на фиг.2 - то же, при достаточной для точности измерений величине базы крана (В>5 м); на фиг.3 - то же, при недостаточной для точности измерений величине базы крана (В<5 м); на фиг.4 - лазерный уровень для контроля положения ходовых колес подъемно-транспортного средства (вид спереди); на фиг.5 - вид А фиг.4; на фиг.6 - лазерный модуль заявляемого устройства.
Реализацию предлагаемого способа осуществляют с помощью лазерного уровня, конструкция которого поясняется фиг.4-6.
Контроль положения ходовых колес 1 и 2, расположенных на одном рельсе, 3 и 4, расположенных на противоположном рельсе, осуществляют с помощью специально разработанного лазерного уровня.
Лазерный уровень предназначен для измерения отклонений колес механизмов передвижения кранов (грузовых тележек) в горизонтальной плоскости с использованием метода параллельного луча.
Лазерный уровень для контроля положения ходовых колес подъемно-транспортного средства содержит основание 5 и закрепленные на нем лазерный модуль 6 и ампула горизонтального уровня 8. Ампула горизонтального уровня 8 предназначена для горизонтирования уровня перед началом каждого измерения для исключения погрешности от наклона. Основание 5 лазерного уровня выполнено в виде достаточно жесткой тонкой пластины из немагнитного металла с узкой и высокой степенью обработки базовой (рабочей) кромкой 9. Размеры основания выбраны с возможностью обеспечения свободного доступа и установки уровня рабочей кромкой 9 к торцу обода кранового колеса на уровне головки рельса в горизонтальной плоскости. Лазерный модуль 6 содержит лафет 10, прикрепленный к основанию 5 крепежным соединением 11, при этом лафет установлен с возможностью качания относительно основания 5 для регулировки параллельности лазерного луча, источник лазерного луча 12, установленный между основанием 5 и лафетом 10, кронштейн 13, имеющий пазы для крепления винтами 14 к лафету 10 для предварительной регулировки направления лазерного луча, винт точной регулировки 15, который установлен между основанием 5 и кронштейном 13 на расстоянии (порядка 100 мм) от оси поворота лафета 10 для обеспечения возможности поворота последнего; корпус 16, прикрепленный к основанию 5 винтами 17. Луч лазерного источника 12 вынесен от рабочей кромки основания 5 на фиксированное расстояние (около 220 мм), достаточное для обхода расположенных вблизи ходового колеса металлоконструкций крана. Винт точной регулировки 15 имеет две резьбовые поверхности, шаг которых (0,7 мм и 0,8 мм) отличается на небольшую величину (0,1 мм) для того, чтобы при одном обороте винта 15 лафет 10 поворачивался на основании 5 на малый угол (0,1/100=0,001), обеспечивая тем самым достаточную (0,00005) точность регулировки параллельности лазерного луча относительно базовой кромки 9 основания 5 лазерного уровня.
Пример осуществления способа контроля положения ходовых колес подъемно-транспортного средства.
До начала использования лазерного уровня производят его юстировку на специальном стенде. Ослабив крепление кронштейна 13 и лафета 10 винтами 14, поворачивают лафет 10 и расположенный на нем лазерный источник 12, производя тем самым предварительную регулировку параллельности направления лазерного луча. Кронштейн 13 закрепляют винтами 14 на лафете 10. Винтом точной регулировки 15 постепенно поворачивают лафет 10 на малый угол до тех пор, пока не обеспечится достаточно точная параллельность лазерного луча относительно базовой кромки 9 основания 5 лазерного уровня.
До начала измерений определяют величину В базы крана, либо используют данные из технического паспорта на кран. Если величина базы крана будет ≥5 м, то базовыми точками являются точки, расположенные на колесах.
Если величина В<5 м, то базовые токи отмечают на участке кранового пути требуемой длины, порядка 10-20 м, с учетом геометрии и конструкции крана.
Перед началом измерения отклонений колес лазерный уровень устанавливают базовой кромкой 9 основания 5 на торцевую поверхность обода колеса на уровне высоты головки рельса в горизонтальной плоскости. Горизонтальное положение уровня устанавливают с помощью ампулы горизонтального уровня 8. Включают лазерный источник 12 с помощью выключателя 7 и направляют лазерный луч параллельно торцевой поверхности обода колеса с погрешностью не более 0,05 мм/м, при этом лазерный луч вынесен от торца обода колеса на фиксированное расстояние, достаточное для обхода расположенных вблизи ходового колеса металлоконструкций крана.
При достаточной для точности измерений величине базы крана (В≥5 м) измерение отклонения луча от номинального положения производят относительно смежного колеса (фиг.2). То есть при установке лазерного уровня к торцевой поверхности первого колеса производят измерения отклонения луча относительно второго (смежного) колеса. Размер Н (фиг.2) - это калибр лазерного уровня (паспортное значение). Величина a1 - результат измерения схождения колеса (определяется с помощью измерения универсальной линейкой). Схождение всех четырех колес проверяется относительно главной оси X. Y - ось направления схождения колес. X1 и Х2 - оси, проходящие через середины каждого из двух колес, стоящих на одном рельсе. B1 - ширина обода колеса (паспортное значение). Производят измерение расстояния от базовой точки смежного колеса до луча и расстояний между колесами 1 и 3, 2 и 4 по пролету (соответственно L1 и L2). После проведения замеров лазерный уровень переустанавливают с колеса 1 на колесо 2 и измерение отклонения по лучу производят относительно колеса 1 (фиг.2). Затем аналогичные измерения выполняют с парой колес 3 и 4, находящихся на противоположном рельсе. Для того чтобы определить фактическое отклонение колес от проектных с помощью значений, полученных в результате измерений, определяют схождение колеса от главной оси Х по формуле (1). Схождение первых двух расположенных на одном рельсе смежных колес, от оси X1 рассчитывают по формуле (2). Схождение второй пары смежных колес, расположенных на противоположном рельсе, от оси X1 рассчитывают по формуле (3), учитывая при этом поправку на отклонение пролета и используя формулу (4).
Наибольшая погрешность измерений перекоса колес при базе крана, равной или более 5 м (В≥5 м) составит 0,00015, которую можно оценить по формуле
Δ=ΔL+Δai/В,
где ΔL=0,00005 - погрешность лазерного уровня;
Δai=0,5 мм - погрешность измерений линейкой металлической со шкалой делений 1 мм,
то есть Δ=0,00005+0,5/5000=0,00015.
При недостаточной для точности измерений величине базы крана (В<5 м) (фиг.3) измерение отклонения луча от номинального положения производят относительно базовых точек участка кранового пути требуемой длины (В=10÷20 м), отмеченных по пролету на равном расстоянии. На фиг.3 базовые точки отмечены буквами O1, O2, A1 и А2. Z1 и Z2 - оси, от которых производятся измерения; Х - главная ось; Y - ось направления схождения колес; L1 - расстояние между базовыми точками O1 и О2, расстояние между базовыми точками A1 и А2 устанавливается также равным L1; Д - база измерений схождения колес (Д=10…20 м); l1 - расстояние от торца колеса 1 до оси Z; l2 - расстояние от торца колеса 2 до оси Z; l3 - расстояние от торца колеса 3 до оси Z1; l4 - расстояние от торца колеса 4 до оси Z1; H - калибр лазерного уровня (паспортное значение); В - база крана; ai и bi - результаты измерений схождений. Для того чтобы определить величину фактического отклонения каждого из колес от проектной производят вычисления по формуле (5). При этом схождение колеса от оси Z рассчитывают по формуле (6). А отклонение оси Z от оси Х определяют по формуле (7), учитывая при этом поправку на отклонение пролета и используя формулу (8). Расстояние от торцов колес 1 и 2 до оси Z вычисляют по формулам (9) и (10), а расстояние от торцов колес 3 и 4 до оси Z1 - по формулам (11)и(12) соответственно.
Наибольшая погрешность измерений перекоса колес при базе крана менее 5 м (В<5 м) составит 0,0002, которую можно оценить по формуле
Δ=2×ΔL+(Δai+Δbi)Д,
где ΔL=0,00005 - погрешность лазерного уровня;
Δai=0,5 мм - погрешность измерений линейкой металлической со шкалой делений 1 мм;
Δbi - погрешность измерений линейкой металлической со шкалой делений 1 мм со смежного колеса,
то есть Δ=0,00005+0,00005+(0,5+0,5)/10000=0,0002.
Таким образом, заявленный способ контроля положения ходовых колес подъемно-транспортного средства и лазерный уровень позволяют с высокой степенью точности определить отклонение колес в горизонтальной плоскости, что значительно продляет срок их эксплуатации.
Предлагаемые технические решения соответствуют критерию «новизна», так как из уровня техники неизвестны технические решения с предложенной совокупностью признаков.
Предлагаемые технические решения соответствуют критерию «промышленная применимость», так как изготовлен опытный образец лазерного уровня, который прошел опытную проверку с заявленным техническим результатом.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС | 2008 |
|
RU2375295C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2083468C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПРОЛЕТА КРАНОВОГО ПУТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2009 |
|
RU2425328C1 |
| АКТИВНЫЙ УПОР ТУПИКОВЫЙ | 2010 |
|
RU2418734C1 |
| Мостовой кран | 1990 |
|
SU1744046A1 |
| Приспособление для контроля положения ходовых колес | 1978 |
|
SU893814A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВКИ РАЗВАЛА СХОЖДЕНИЯ КОЛЕС АВТОМОБИЛЯ | 2014 |
|
RU2569073C1 |
| Способ установки ходовых колес рельсовых грузоподъемных кранов | 1988 |
|
SU1527131A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛАНОВО-ВЫСОТНОГО ПОЛОЖЕНИЯ КРАНОВЫХ ПУТЕЙ КОЗЛОВОГО КРАНА | 2012 |
|
RU2507480C2 |
| СПОСОБ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ, ПУТЕВАЯ МАШИНА, УСТРОЙСТВО ДЛЯ ВЫПРАВКИ ЖЕЛЕЗНОДОРОЖНОГО ПУТИ И ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО | 2001 |
|
RU2212486C2 |
Изобретение относится к подъемно-транспортному машиностроению и предназначено для контроля положения ходовых колес мостовых и козловых кранов при изготовлении и находящихся в эксплуатации. В способе определяют базовые точки измерений на участке кранового пути. Далее измеряют отклонения каждого из двух смежных колес в горизонтальной плоскости на уровне высоты головки рельса путем измерения расстояний от базовой точки до луча. Производят расчет фактического отклонения колеса от проектной величины по соответствующим формулам для каждой пары колес. В случае, когда для точности измерений недостаточна величина базы крана, для определения отклонения колеса от номинального положения производят измерение положения колес относительно базовых точек участка кранового пути требуемой длины, от десяти до двадцати метров, отмеченных по пролету. Затем рассчитывают величину фактического отклонения каждого из колес от проектной по соответствующей формуле. Изобретение обеспечивает повышение точности измерения отклонений колес в горизонтальной плоскости. 2 з.п. ф-лы, 6 ил.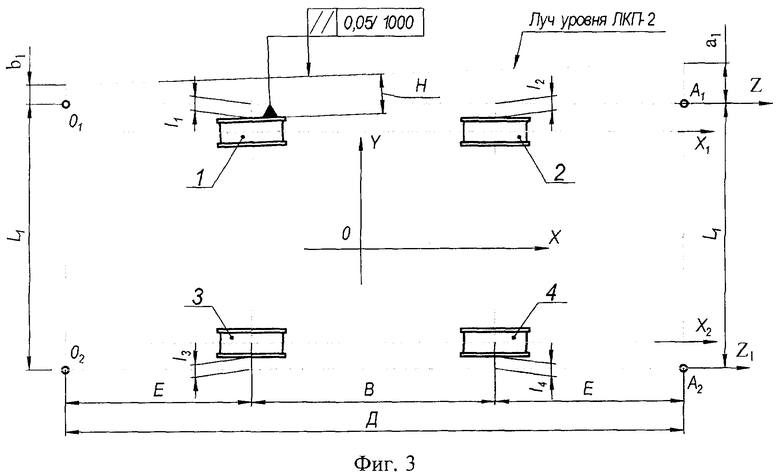
1. Способ контроля положения ходовых колес подъемно-транспортного средства, включающий установку устройства с источником лазерного луча на колесе, направление лазерного луча параллельно торцевой поверхности колеса, определение отклонения колеса в горизонтальной плоскости с помощью лазерного луча, отличающийся тем, что определяют базовые точки измерений на участке кранового пути, измерение отклонения колеса в горизонтальной плоскости производят на уровне высоты головки рельса путем установки лазерного уровня базовой кромкой основания на торцевую поверхность обода колеса на уровне высоты головки рельса в горизонтальной плоскости, после чего определяют отклонение каждого колеса в горизонтальной плоскости измерением расстояния от базовой точки до луча, при этом при достаточной для точности измерений величине базы, по меньшей мере пять метров, для определения отклонения колеса от номинального положения производят измерение расстояния от базовой точки смежного колеса до луча и расстояния между колесами по пролету, затем рассчитывают величину фактического отклонения каждого из колес от проектной по формуле:
где Ki - схождение колеса от главной оси X;
Ci - схождение колес от оси X1;
Δх=0,5ΔL - отклонение оси X1 от оси X,
при этом схождение каждого колеса из пары, расположенной на одном рельсе, рассчитывают по формуле
где ai - измеренное значение схождения;
Н - калибр лазерного уровня, а именно значение калибра, указанное в паспорте;
B - база крана;
а схождение каждого колеса из пары, расположенной на другом рельсе, рассчитывают по формуле
где ΔL - поправка на отклонение пролета, рассчитываемая по формуле
где L1 - величина пролета между одной парой колес, расположенных на одной оси;
L2 - величина пролета между второй парой колес, расположенных на одной оси;
а при недостаточной для точности измерений величине базы крана, а именно менее пяти метров, для определения отклонения колеса от номинального положения по лучу производят измерение положения колес относительно базовых точек участка кранового пути требуемой длины, от десяти до двадцати метров, отмеченных по пролету, затем рассчитывают величину фактического отклонения каждого из колес от проектной по формуле
где Ki - схождение колеса от главной оси X;
Ci - схождение колеса от оси Z;
Δz - отклонение оси Z от оси X,
при этом схождение колеса от оси Z рассчитывают по формуле
где ai и bi - измеренные значения схождения;
Д - база измерений схождения колес (Д=10…20 м),
отклонение оси Z от оси Х определяют по формуле
где ΔL - поправка на отклонение пролета;
l1 - расстояние от торца одного из колес, расположенных на ближайшем к оси Z рельсе;
l2 - расстояние от торца другого из колес, расположенных на ближайшем к оси Z рельсе;
В - база крана, а именно значение базы крана, указанное в паспорте,
при этом поправку на отклонение пролета рассчитывают по формуле

где δL - отклонение пролета;

где Н - калибр лазерного уровня, а именно значение калибра, указанное в паспорте;
Е - расстояние от вертикальной оси колеса до ближайшей базовой точки в горизонтальной плоскости,

где А - расстояние от колеса до базовой точки;


2. Способ контроля положения ходовых колес подъемно-транспортного средства по п.1, отличающийся тем, что базу крана определяют с учетом геометрии и конструкции крана.
3. Способ контроля положения ходовых колес подъемно-транспортного средства по п.1, отличающийся тем, что лазерный луч вынесен от торца обода колеса за габариты крана на фиксированное расстояние, то есть калибр.
| Способ проверки плотности пригонки клапана к седлу | 1947 |
|
SU89513A1 |
| Коловратная машина | 1934 |
|
SU43855A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПОЛОЖЕНИЯ ХОДОВЫХ КОЛЕС ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВ | 1993 |
|
RU2083468C1 |
| CN 201280386 Y, 29.07.2009. | |||

