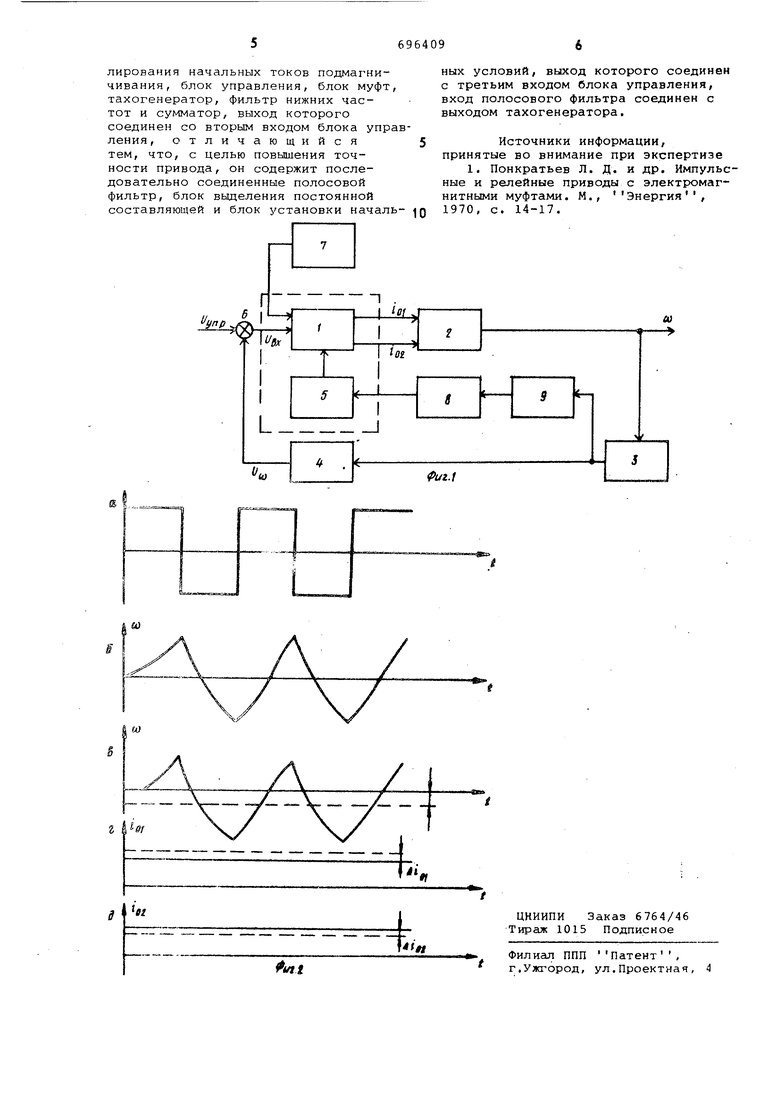
(54) СЛЕДЯЩИЙ ПРИВОД Предлагаемый следящий привод включает блок 1 управления муфтами с ШИМ, блок 2 муфт (две управляе мые порошковые муфты), тахогенератор 3, фильтр 4 нижних частот, блок 5 установки начальных ус-I ловий, сумматор 6, блок 7 установки начальных условий подмагничивания/ блок 8 выделения постоянной составляющей с фазовым детектором, полосовой фильтр 9, имеющий область про рачности (5-6) f сигнала макс. Частота периодических сигналов с выхода блока 7 установки начальны условий иодмагничивания должна расп лагаться в области прозрачности полосового фильтра - 9. Контур из последовательно соединенных 1, 2, 3, 4, 6 образует следя щую систему по скорости о Контур из последовательно соединенных 7, 1, 2, 3, 9,8, 5, 1 образует кольцо самонастройки по выхо ному параметру привода - равенству ментов вращения каждой муфты при от сутствии и в. Предлагаемый привод на ЭПМ работает следующим образом. Блок 5 включает в себя генератор импульсов типа Меандр (фиг. 2а Блок -1 управления управляет ток ми муфт 2 по зависимости: лЗ , да--i -ig, где k - коэффициент передачи блок 1 управления; iia рабочие токи муфт. Блок 5 установки начальных услов ( 4-51-02 ) обеспечивает также управле ние начальными токами по сигналу с выхода блока 8 выделения постоянной составляющей о С выходной осью привода соединен тахогенератор 3j выходной сигнал которого после прохож ния через фильтр 4 нижних частот поступает на сумматор 6, образуй цепь отрицательной обратной связи по скорости. Выходное напряжение тахогенератора 3 поступает также через полосовой фильтр 9 на блок 8 выделения постоянной составляющей Постоянное напряжение с выхода кот рого поступает на вход блока 5 уст новки начальных условий. В результате этохо обеспечивает ся регулировка токов IQI, io2 так, что на выходе блока 2 муфт моменты вращения равны, и чувствительно привода при отклонениях в ту и дру стороны повышается Рассмотрим работу предлагаемого устройства по графикам на фиг. 2. При равенстве начальных моментов муфт, обеспечиваемых токами IQ ,0 (фиг. 2г, д) и введение на вход блока управления 1 маендров (фиг. 2 а), на выходе привода устаавливаются сравнительно высокочасотные колебания скорости (фиг. 2 б), реднее значение которых равняется улю. На выходе блока 8 выделения остоянной составляющей управляюие напряжение отсутствует и начальная настройка токов подмагничивания 01, Чог S изменяется. Если по каким-либо причинам произошло изменение моментов или изменились моменты со.противления нагрузки, в результате чего нарушился баланс моментов у то на выходе привода вынужденные колебания скорости ш (фиг. 3 в) не будут симметричными относительно среднего значения. Блок 8 выделения постоянной составляющей выделит отклонение ( -ди ) (фиг. 2 в), величина которого пропорциональна- величине разбаланса по моменту, а знак направлению разбаланса. Напряжение (-дУ ) воздействует на блок 5 установки начальных уело-ВИЙ так, что в муфтах устанавливаются токи т 0-1 U и 1о2 л (фиг. 2 Г;, д) , обеспечивающие баланс моментов на выходе привода при отсутствии Ug . Уходы моментов муфт в процессе установления рабочей температуры муфт, а также изменения моментов сил сопротивления в приводе от .действия температуры окружающей среды носят весьма медленный харак-тер,- поэтому к система регулировки рачальных токов подмагничивания не предъявляются требования по дйнамичеЬкой точности, и она проста в реализации, Техкико-экономическая эффективность предлагаемого изобретения характеризуется повышением точности и чувствительности привода Но. 10%. в процессе создания приводов по предлагаемой схеме не потребуется подбор пар муфт, То е., вся изготовленная партия муфт будет реализовака.. В существующих приводах с упразляекщлш порошковыми муфтами необходим подбор пар муфт, в процессе которогоизготовленная партия муфт реализуется на 80-85%., для выполнения плана приходится увеличивать количество изготовляемых муфт соответственно на 18-25%, Дополнительные затраты на производство блока управления незначительны, вводимые в блок электронные схемы типовые, реализуются на современных элементах и по сложности составляют менее от существующего блока. Снижение трудоемкости изготовления привода от внедрения данног-о изобретения может быть порядка 18%. Формула изобретения . Следящий привод, содержании поспедовательно соединенные On-ji; рсгулирования начальных токов подмагничивания, блок управления, блок муфт, тахогенератор, фильтр нижних частот и сумматор, выход которого соединен со вторым входом блока управления, отличающийся тем, что, с целью повышения точности привода, он содержит последовательно соединенные полосовой фильтр, блок выделения постоянной составляющей и блок установки началь
ных условий, выход которого соединен с третьим входом блока управления, вход полосового фильтра соединен с выходом тахогенератора.
Источники информации, принятые во внимание при экспертизе
1. Понкратьев Л. Д. и др. Импульсные и релейные приводы с электромагнитными муфтами. М., Энергия, 1970, с. 14-17.
ш
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод на электромагнитных порошковых муфтах | 1980 |
|
SU881661A1 |
| Устройство для управления реверсивным приводом | 1972 |
|
SU612374A1 |
| Устройство управления приводом на электромагнитныхых порошковых муфтах | 1973 |
|
SU458938A1 |
| Система автоматического гашения вибраций | 1984 |
|
SU1269106A1 |
| Виброгасящее устройство | 1982 |
|
SU1059322A1 |
| Устройство для контроля магнитных головок | 1988 |
|
SU1610492A1 |
| Устройство для диагностики состояния процесса резания | 1983 |
|
SU1122476A1 |
| Следящий привод | 1986 |
|
SU1312522A1 |
| Гистериограф | 1979 |
|
SU1359762A2 |
| Устройство для установки тока подмагничивания в магнитофоне | 1982 |
|
SU1068986A1 |
