Изобретение относится к автоматике и может быть использовано при управлении антеннами радиотелескопов, подверженных существенным аэродинамическим воздействиям.
Цель изобретения - повышение точности следящего привода.
На фиг. 1 приведена функциональная схема привода; на фиг. 2 - принципиальная электрическая схема привода; на фиг. 3 - кинематическая схема силового редуктора; на фиг. 4 - принципиальная схема блока управления.
Следящий привод содержит задатчик 1, регулятор 2 положения, регулятор 3 скорости, регулятор 4 тока, усилитель 5 мощности, исполнительный электродвигатель 6, силовой редуктор 7, объект 8 регулирования, датчик 9 положения, датчик 10 тока, тахогенератор 11, фильтр 12, блок 13 управления, резисторы 14-27, операционные усилители 28-30, ключи 31 и 32, соединительные муфты 33, управляемые соединительные муфты 34, переменную часть 35 редуктора, шестерни 36, постоянную часть 37 редуктора, общую шину 38, пороговые блоки 39-41, элементы НЕ 42-45, элементы И 46-48, источник 49 постоянного напряжения, конденсатор 50, операи.ион- ный усилитель 51, элемент И 52.
Регулятор 2 положения (фиг. 2) содержит резисторы 14-18, операционный усилитель 28, ключи 31 и 32 и конденсатор 50.
Регулятор 3 скорости (фиг. 2) содержит резисторы 19-21 и операционный усилитель 29.
Регулятор 4 тока (фиг. 2) содержит резисторы 22-24 и операционный усилитель 30.
Датчик 10 тока (фиг. 2) содержит резисторы 25 и 26 и операционный усилитель 51.
Силовой редуктор 7 содержит соединительные муфты 33, переменную часть 35 редуктора и постоянную часть 37 редуктора. В состав переменной части 35 редуктора входят управляемые соединительные муфты 34 и шестерни 36.
Блок 13 управления содержит пороговые блоки 39-41. Элементы НЕ 42-45, элементы И 46-48, источник 49 постоянного напряжения, элемент И 52.
Фильтр 12 состоит из параллельно соединенных фильтра низких частот и фильтра высоких частот.
Устройство работает следующим образом.
В установившемся режиме слежения за космическими объектами, имеющими малые ускорения, силовой привод имеет запас по мощности, достаточный для преодоления постоянной составляющей от ветрового воздействия. Однако, высокочастотные флуктуации ветрового воздействия существенно перегружают электродвигатель, что приво.1ит к
возникновению колебаний в следящем приводе и к снижению его точности. В предлагаемом приводе возможно перераспределить мощность электродвигателя 6 между высоко- и низкочастотными составляющими .момента нагрузки путем изменения передаточного отнощения силового редуктора 7. Это позволяет электродвигателю 6, имеющему запас мощности по статической нагрузке, легче отрабатывать высокочастотные ветровые нагрузки, что расширяет диапазон использования комплекса в целом. При этом нижний предел изменения передаточного отношения силового редуктора 7 определяется возможностью отработки статических нагрузок в режиме слежения, а верхний - соответствует выбранному передаточному отношению, исходя из требования обеспечения режимов переброски и разгона - торможения.
Для того, чтобы при изменении пере0 даточного отношения силового редуктора 7 не изменилась настройка следящего привода в целом, коэффициент передачи регулятора 2 положения должен изменяться обратно пропорционально изменению пере5 даточного отношения редуктора путем закорачивания резистора 16, стоящего в обратной связи операционного усилителя 28, резисторами 17 или 18 (фиг. 2). Это осуществляется при помощи ключей 31 и 32, управляемых блоком 13 управления. В каQ честве управляемых соединительных муфт 34 могут быть применены порошковые элек- тромагнитные муфты, которые также несут функцию фрикционных предохранительных муфт в силовом приводе.
Фильтр 12 предназначен для разделе5 ния сигнала, пропорционального току якорной цепи электродвигателя 6 на высоко- и низкочастотные составляющие, причем частота высокочастотной составляющей на порядок превышает частоту низкочастотной составляющей, а последняя на порядок вы ше частоты полезного сигнала. Названные разделенные составляющие, пропорциональные току электродвигателя 6, поступают на соответствующие входы блока 13 управления. При значениях этих сигналов, не
5 превышающих уровней, выставленных во входных пороговых блоках 39-41, сигнал Ц через элемент И 48 включает силовую цепь управляемой соединительной муфты 34, обеспечивающей соединение кинематической цепи с максимальным передаточным отно0 щением. В этом случае остальные муфты заблокированы от включения элементами НЕ 44 и 45 и И 46 и 52. При появлении высокочастотной составляющей тока, превышающей уровень срабатывания порогового блока 39, через элемент И 52 вклю5 чается муфта 34, обеспечивающая включение кинематической цепи силового редуктора 7 с минимальным передаточным отношением.
В этом случае остальные соединительные муфты блокируются от включения элементами НЕ 44 Vi 47 и 48. При по явле- нии низкочастотной составляющей тока, превышающей уровень срабатывания порогового блока 40, через элементы И 46 и 47 подключается соединительная муфта 34, обеспечивающая включение кинематической цепи силового редуктора 7, с промежуточным передаточным отношением. При этом остальные муфты блокируются от включения элементами НЕ 42 и 45 и И 48 и 52. При появлении низкочастотной составляющей тока, превышающей уровень срабатывания порогового блока 41, снова вклю10
Формула изобретения
Следящий привод, содержащий задатчик, соединенный выходом с первым информационным входом регулятора положения, подключенного выходом к первому информационному входу регулятора скорости, соединенного выходом с первым информационным входом регулятора тока, подключенного выходом через усилитель мощности к входу исполнительного электродвигателя, вал которого кинематически связан с валом та- хогенератора и входным валом силового редуктора, выходной вал которого кинематически связан с валом объекта регулирования, на котором установлен датчик почается муфта 34, обеспечивающая соеди- 15 ложения, соединенный выходом с вторым
нение кинематической цепи силового редуктора 7 с максимальным передаточным от- нощением. Остальные муфты от включения блокируются элементами НЕ 41, 42 и И 46, 47 и 52.
информационным входом регулятора положения, и датчик тока, соединенный входом с электрическим выходом исполнительного электродвигателя, а выходом - с вторым информационным входом регулятора тока, а выход датчика тока подключен к Предлагаемый следящий привод решаетвторому информационному входу регулятора
задачу повыщения точности наведения
благодаря тому, что, изменяя передаточное
отношение силового редуктора 7 в зависи20
скорости, отличающийся тем, что, с целью повыщения точности следящего привода, в нем дополнительно установлены блок управмости от частотного состава тока якорной 25 ления и фильтр, соединенный входом с выцепи исполнительного электродвигателя 6, появляется возможность легче отрабатывать высокочастотные составляющие ветровой нагрузки внутри линейной зоны регулятора скорости с ограничением.
ходом датчика тока, а выходами - с соответствующими информационными входами блока управления, подключенного выходами к управляющим входам соответственно регулятора положения и силового редуктора.
Формула изобретения
Следящий привод, содержащий задатчик, соединенный выходом с первым информационным входом регулятора положения, подключенного выходом к первому информационному входу регулятора скорости, соединенного выходом с первым информационным входом регулятора тока, подключенного выходом через усилитель мощности к входу исполнительного электродвигателя, вал которого кинематически связан с валом та- хогенератора и входным валом силового редуктора, выходной вал которого кинематически связан с валом объекта регулирования, на котором установлен датчик положения, соединенный выходом с вторым
20
скорости, отличающийся тем, что, с целью повыщения точности следящего привода, в нем дополнительно установлены блок управходом датчика тока, а выходами - с соответствующими информационными входами блока управления, подключенного выходами к управляющим входам соответственно регулятора положения и силового редуктора.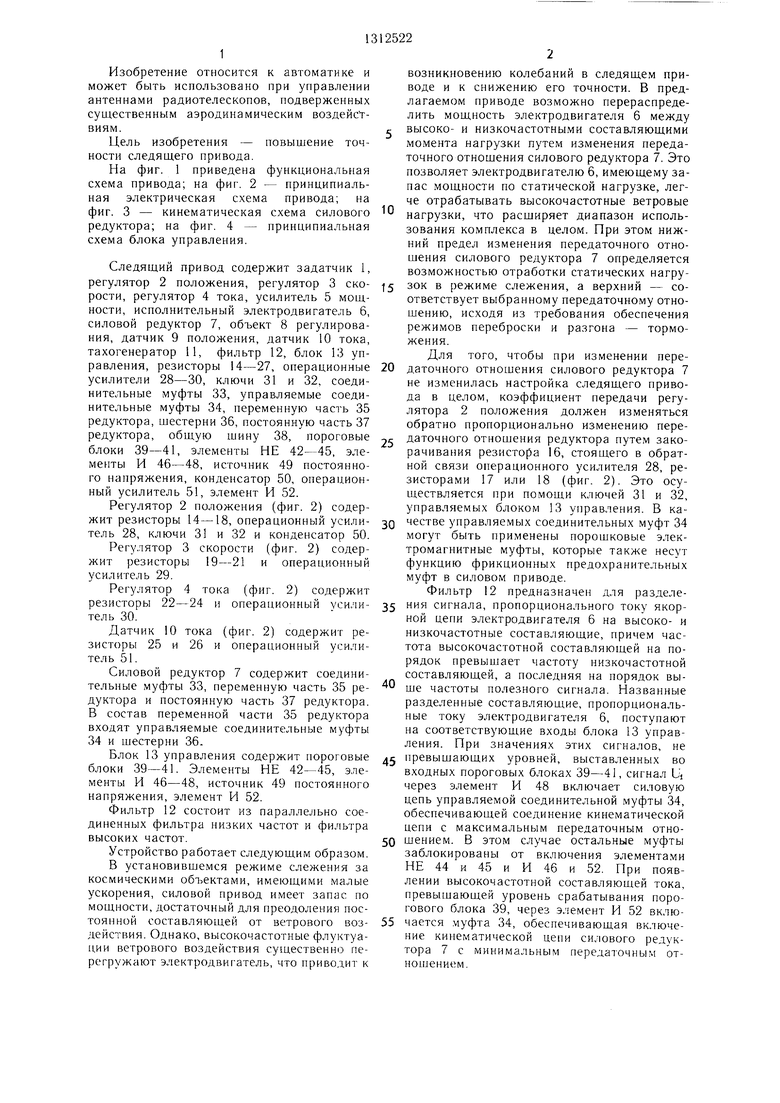
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1985 |
|
SU1325404A1 |
| Система управления положением транспортного механизма | 1985 |
|
SU1386955A1 |
| Устройство для имитации цифрового сигнала ошибки следящего привода | 1987 |
|
SU1472870A1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ СКОРОСТЯМИ И УГЛАМИ НАВЕДЕНИЯ АРТУСТАНОВКИ И УСТАНОВКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2203470C2 |
| Следящая система для управления гелиостатом | 1981 |
|
SU964575A1 |
| Устройство для компенсации люфта в двухдвигательном приводе | 1978 |
|
SU746399A1 |
| Система управления приводом портала машины термической резки | 1989 |
|
SU1692781A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2015 |
|
RU2621716C2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД С АСИНХРОННЫМ ИСПОЛНИТЕЛЬНЫМ ДВИГАТЕЛЕМ | 2014 |
|
RU2580823C2 |
| УКАЗАТЕЛЬ ПОЛОЖЕНИЯ ПОГЛОЩАЮЩЕГО СТЕРЖНЯ В АКТИВНОЙ ЗОНЕ РЕАКТОРА | 2013 |
|
RU2540441C2 |

Изобретение относится к астротехни- ке и может быть использовано при управлении антеннами радиотелескопов, подверженных существенным аэродинамическим, например ветровым, воздействиям. Целью изобретения является повышение точности следящего привода. Поставленная цель достигается за счет компенсации высокочастотных ветровых возмущений, которые в следящем приводе по положению с подчиненными замкнутыми контурами по скорости и току фиксируются с помощью датчика тока. В сигнале тока выделяются низкочастотная и высокочастотные составляющие, и в зависимости от соотнощения их величин в приводе осуществляются изменения передаточного числа редуктора и коэффициента передачи регулятора положения. Причем при увеличении передаточного числа редуктора уменьшается коэффициент передачи регулятора положения. 4 ил. ьо сд o ю
От датчимй .Обратной связи
Фиг. 2
a/nJ3
Фиг.З
| Следящая система | 1975 |
|
SU608118A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система | 1975 |
|
SU607181A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Башарин А | |||
| В | |||
| и др | |||
| Управление электроприводами | |||
| Л.: Энергоиздат, 1982, с | |||
| Мяльно-трепальный станок для обработки тресты лубовых растений | 1922 |
|
SU200A1 |
