:i
Изобретение относится к области техники, занимающейся разработкой устройств управления приводами на электромагнитных порошковых муфтах (ЭПМ), предназначенных, например, для работы в составе зеркальных а)Нтенн.
Известны устройства управления приводом, где для уменьшения абсолютной величины времени реверса без увеличения момента муфт применяются отдельные цепи управления каждой муфтой, но .при этом время реверса изменяется в процессе р-аботы, ухудшая технические характеристики аппаратуры.
С целью повышения надежности в предлагаемом устройстве применяются гистерезисные элементы с регулируемыми порогами и две следяш,ие системы, измеряющие время от момента подачи сигнала на отключение ведущей муфты до момента, когда скорость зеркала не станет равной нулю, сравнивающие его с заданным значением времени и изменяющие величину порогов гистерезионых элементов пропорционально измеренной разности.
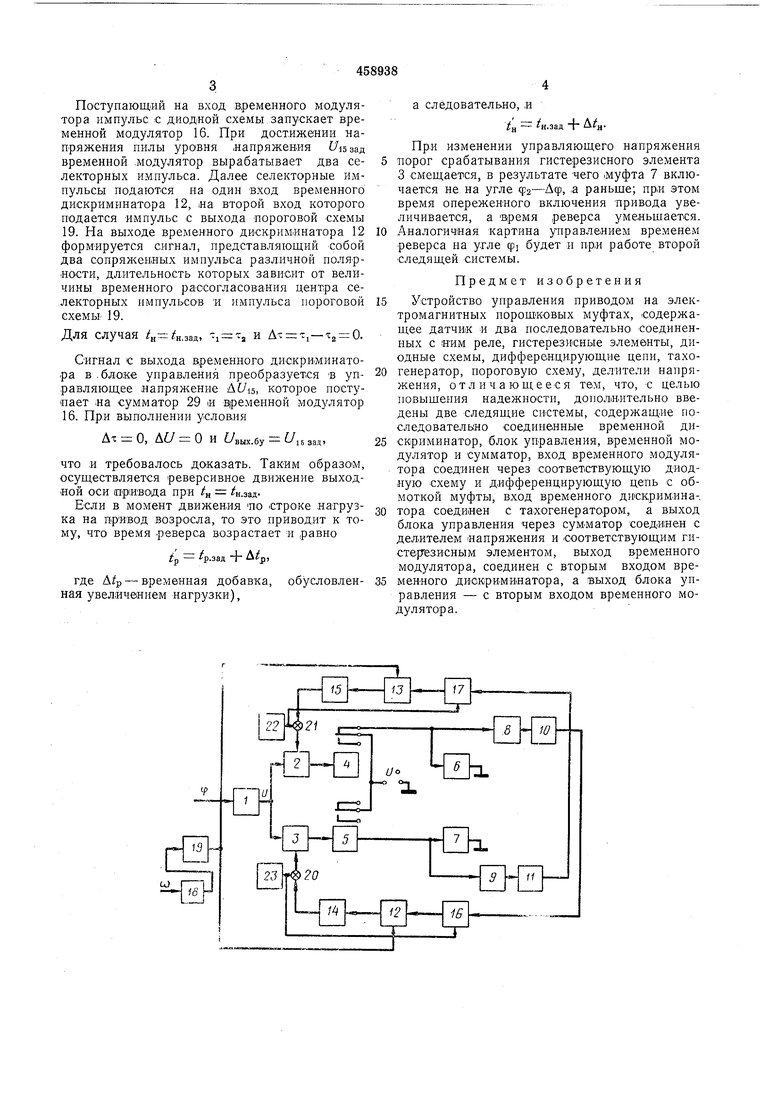
На чертеже изображена схема предлагаемого устройства.
Схема содержит датчик 1, релейные элементы 2 и 3, реле 4 и 5, муфты б и 7, диодные схемы 8 и 9, дифференцирующие цепочки 10 и И, временные дискриминаторы 12 и
13, -блоки управления 14 и 15, временные модуляторы 16 и 17, тахогенератор 18, пороговую схему 19, сумматоры 20 и 21, делители напряжения 22 и 23.
Устройство работает следующим образом.
При достижений сигнала с датчика 1 уровня срабатывания гистерезисного элемента 3 происходит включение муфты 7, а при срабатывании гистерезисного элемента 2 -выключение муфты 6.
При выключении муфты 6 скачок напряжения через диодную схему 8, дифференцирующую цепочку 10 подается на вход временного модулятора 16.
При выключении муфты 6 скорость привода начинает меняться на обратную, и в момент равенства ее нулю с выхода пороговой схемы 19 выдается импульс, который поступает на вход временного дискриминатора 12.
Если привод работает в идеальных условиях, т. е. реальное время реверса -в нем равно заданному, определяемому только уровнем напряжения с делителя, то при этом, очевидно, н г н-зад. в этом Случае величина приращения выходного сигнала блока управления равна нулю, и порог орабатыватия, например, гистерезисного элемента 3 установлен в соответствии с напряжением делителя 23 и равен С 15зад (т .е. тому значению, ври котором
обеспечивается н-зад).
Поступающий на вход временного модулятора импульс .С диодной схемы,запускает временной модулятор 16. При достижении напряжения пилы уровня .напряжения /15зад временной .модулятор вырабатывает два селекторных импульса. Далее селекторные импульсы подаются на один вход временного дискриминатора 12, «а второй вход которого подается Импульс с выхода пороговой схемы 19. На выходе временного дискриминатора 12 формируется сигнал, представляющий собой два сопрял ен,ных имиульса различной полярности, длительность которых зависит от величины временного рассогласования центра селекторных импульсов И импульса пороговой схемы 19.
Для случая .зад, И Дт: 0.
Сигнал с выхода в,ременного дискриминатора в .блоке управления преобразуется в управляющее напряжение AUis, которое поступает на сумматор 29 и эременной модулятор 16. Пр.и выполнении условия
At О, А6 О и бвых.бу задчто :и требовалось доказать. Таким образом, осуществляется реверсивное движение выходной оси привода при /« н.задЕсли в момент движения по строке .нагрузка на привод возросла, то это приводит к тому, что время реверса возрастает и равно
ip -- р.зад Г АГр,
где Aifp - временная добавка, обусловленная увеличением нагрузки).
а следовательно,и
н Эад Г АГнПри изменении управляющего напряжения порог срабатывания гистерезисного элемента 3 смещается, в результате чего .муфта 7 включается не на угле ф2-Аф, .а раньше; при этом время опереженного включения привода увеличивается, а таремя реверса уменьшается. Аналогичная картина управлением временем реверса на угле ф будет и при работе второй следящей системы.
Предмет изобретения
Устройство управления приводом на электромагнитных порошковых муфтах, содержащее датчик и два последовательно соединенных с ним реле, гистерезисные элементы, диодные схемы, дифференцирующие цепи, тахогенератор, пороговую схему, делители напряжения, отличающееся тем, что, с целью повышения надежности, дополнительно введены две следящие системы, содержащие последователыно соединенные временной дискриминатор, блок управления, временной модулятор и сумматор, вход временного модулятора соединен через соответствующую диодную схему и дифференцирующую цепь с обмоткой муфты, вход временного дпскримина-.
тора соединен с та-хогенератором, а выход блока управления через сум матор соединен с делителем напряжения и соответствующим гиCTejre3.ncHbiM элементом, выход временного модулятора, соединен с вторым входом временного дискриминатора, а выход блока управления - с вторым входом временного модулятора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления реверсивным приводом | 1972 |
|
SU612374A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ВРЕМЕННЫХ ИНТЕРВАЛОВ В УСЛОВИЯХ ПОМЕХ | 1991 |
|
RU2030757C1 |
| Устройство для защиты энергетической установки от превышения заданного уровня токового сигнала | 1975 |
|
SU561251A1 |
| ЭКСТРЕМАЛЬНЫЙ ПОЗИЦИОННЫЙ РЕГУЛЯТОР НЕПРЕРЫВНОГО ДЕЙСТВИЯ | 1967 |
|
SU189926A1 |
| Реверсивный электропривод постоянного тока | 1975 |
|
SU752714A1 |
| Электронный тахометр | 1981 |
|
SU994991A2 |
| Электропривод постоянного тока | 1975 |
|
SU650193A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящий привод на электромагнитных порошковых муфтах | 1980 |
|
SU881661A1 |
| ДАТЧИК НУЛЕВОГО ТОКА | 2009 |
|
RU2390906C1 |
