О)
;0 м
00
ф
00 Изобретение относится к области автоматической стабилизации и уирав ления движением судов на подводных крыльях (СПК) и может быть исполь-, зовано при создании систем автомати ческого управления подводными крьтья ми (САУПК) современных скоростных СПК. Известна система автоматического управления судном на подводных крыльях, содержащая последовательно соединенные датчики параметров движения, резервированные блоки формирования и усиления сигналов управления , исполнительные приводы органов управления подъемной силой и блок контроля предельных параметров и индикации отказов, соединенный своими входами с выходами датчиков
параметров движения и блоков формиро- 20 ния. вания и усиления сигналов управления а выходом - с входом устройства экст ренного торможения, один из выходов которого предназначен для подключени к системе управления оборотами главных двигателей. В известной системе задача обеспечения безопасности движения судна при экстренном торможении не решена в полном объеме, поскольку за время гашения скорости судна, обусловленного временем срабатывания аг регатов управления главными двигате лями и инерционными свойствами судна, оно проходит на крыльях еще знал чительный путь, на протяжении которо го судно может потерять устойчивость столкнуться с препятствием и т.п. Значительный тормозной путь при экстренном торможении судна, снабженного известной САУПК, обусловлен тем, что по мере снижения скорости органы управления, оставаясь в контуре стабилизации, хотя и со снижающейся эффективностью, стремятся сохранить высоту крыльевого режима, препятствуя те.м самым скорейшей пос.адке судна. Целью изобретения является уменьшение длины тормозного пути и повышение безопасности Движения судна . при экстренном торможении. Эта цель достигается тем, что другие выходы устройства экстренного торможения подключены к входам блоков формирования и усиления сигналов управления. 82 На чертеже представлена функциональная схема устройства. Система содержит последовательно соединенные датчики параметров движения, резервированные блоки 2 формирования и усиления сигналов управления , исполнительные приводы 3 и органы 4 управления подъемной силой, а также блок 5 контроля предельньпс параметров и индикации отказов, ,к входам которого подключены выходы датчиков 1 и блоков 2. Выход блока 5 подключен к входу устройства 6 экстренного торможения, один из вьпсодов которого предназначен для подключения к системе управления оборотами главных двигателей, а другие выходы подключены к входам блоков 2 формирования и усиления сигналов управлеДатчики 1 параметров движения, резервированные блоки 2 формирования и усиления сигналов управления, приводы 3 и органы 4 управления подъемной силой совместно с объектом образуют замкнутые контуры регулирования, которые обеспечивают стабилизацию и управление по соответствующему параметру при движении судна на крыльях. Использованное в системе резервирование позволяет сохранять ее работоспособность при отказах отдельных элементов и узлов. I Блок 5 контроля предотвращает возможность накопления отказов в системе, обеспечивая своевременную их индикацию. Кроме того, при отказах наиболее важных элементов и узлов в процессе движения судна на крыльях блок 5 выдает сигнал на устройство 6 экстренного торможения, которое в свою очередь выдает сигнал на снижение оборотов главных двигателей до величины, соответствумщей переходу в водоизмещающее положение. Блок 5 осуществляет также непрерывное сравнение текущих значений крена и дифферента с предельно допустимыми значениями этих параметров. В случае появления опасных крена или дифферента блок 5 также выдает сигнал на перевод судна в водоизмещающее положение. Опасные крены и дифференты могут быть вызваны внезапным воздействием на судно негфедвиденньпс больших возмущений (чрезмерная волна, шквал ветра}, выходящих за пределы спецификационных условий эксплуатации в крьшьевом режиме, с которыми система не в состоянии справиться (например, из-за недостаточной для таких условий эффектив ности органов управления). При отсутствии входного сигнала сигналы на выходах устройства 6 экстренного торможения также отсутствуют. При поступлении сигнала« от блока 5 устройство 6 экстренного торможения срабатьшает, при этом на егЬ выходе, предназначенном для подключения к системе управления оборотами главных двигателей, формируется сигнал на снижение обор тов главных двигателей до величины, соответствующей переходу в водоизме щающее положение, а на выходах, под ключенных к блокам 2 формирования и усиления сигналов управления, формируются сигналы, под воздействием которых исполнительные приводы 3 перемещают органы управления 4 в по ложение, соответствующее минимально подъемной силе. Примером реализации выходной час ти устройства 6 экстренного тормоясения может служить электромагнитное реле, через нормально разомкнутые контакты которого к входам блоков 2 и к системе управления обороами главных двигателей подключаютя источники-постоянного напряжения оответствукщей полярности. Таким образом, при срабатывании устройства 6 одновременно со сбросом оборотов главных двигателей автоматически производится перекладка органов 4 управления в положение, обеспечивающее скорейшую посадку судна. При этом за счет входа корпуса в воду происходит резкое увеличение лобового сопротивления. Такое комплексное решение вопроса экстренного перевода судна в водоизмещаюйее положение, .осуществленное в предлагаемом изобретении, позволяет резко сократить тормозной путь и повысить безопасность судна при экстренном торможении. Цдя расширения функциональных возможностей предлагаемой САУПК в схему устройства 6 экстренного тор можения может быть введен командоа. парат для осуществления принудительного его срабатьгеания от действий О.ператора (при нажатии оператором кнопки). Необходимость в экстренной посадке судна оператором может возникнуть при внезапном появлении на пути препятствия (плавучие предметы, мель и .пр.) , либо при аварийноопасных отказах силовых агрегатов.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| Система управления судном на подводных крыльях | 1980 |
|
SU888079A1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |
| ЛЕГКИЙ СВЕРХЗВУКОВОЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2004 |
|
RU2271305C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ СКОРОСТНЫХ СУДОВ | 2014 |
|
RU2577165C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ПОДДЕРЖКИ ЭКИПАЖА | 2015 |
|
RU2598130C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ДВИЖЕНИЯ И СНИЖЕНИЯ ПОТРЕБЛЯЕМОЙ МОЩНОСТИ СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ В ВИДЕ КОРМОВОГО МЕХАНИЗМА КОРРЕКЦИИ ХАРАКТЕРИСТИК УПРАВЛЯЕМОСТИ СУДНА | 2003 |
|
RU2262462C2 |
СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СУДНОМ НА ПОДВОДНЫХ КРЫЛЬЯХ, содержащая последовательно соединенные датчики параметров движения, резервированные блоки формирования и усиления сигналов управления, исполнительные приводы органов управления подъемной силойи блок контроля предельных параметров и индикации отказов, соединенный своими входами с выходами датчиков параметров движения и блоков формирования и усиления сигналов управления, а выходом - с входом устройства экстренного торможения, один из выходов которого предназначен для подключения к системе управления оборотами главных двигателей, отличающаяся тем, что, с целью уменьшения длины тормозного пути и повышения безопасности движения судна при экстренном торможении, другие выходы устройства экстренного торможения подключены к входам блоков формирования и усиления сигналов управления.iСЛ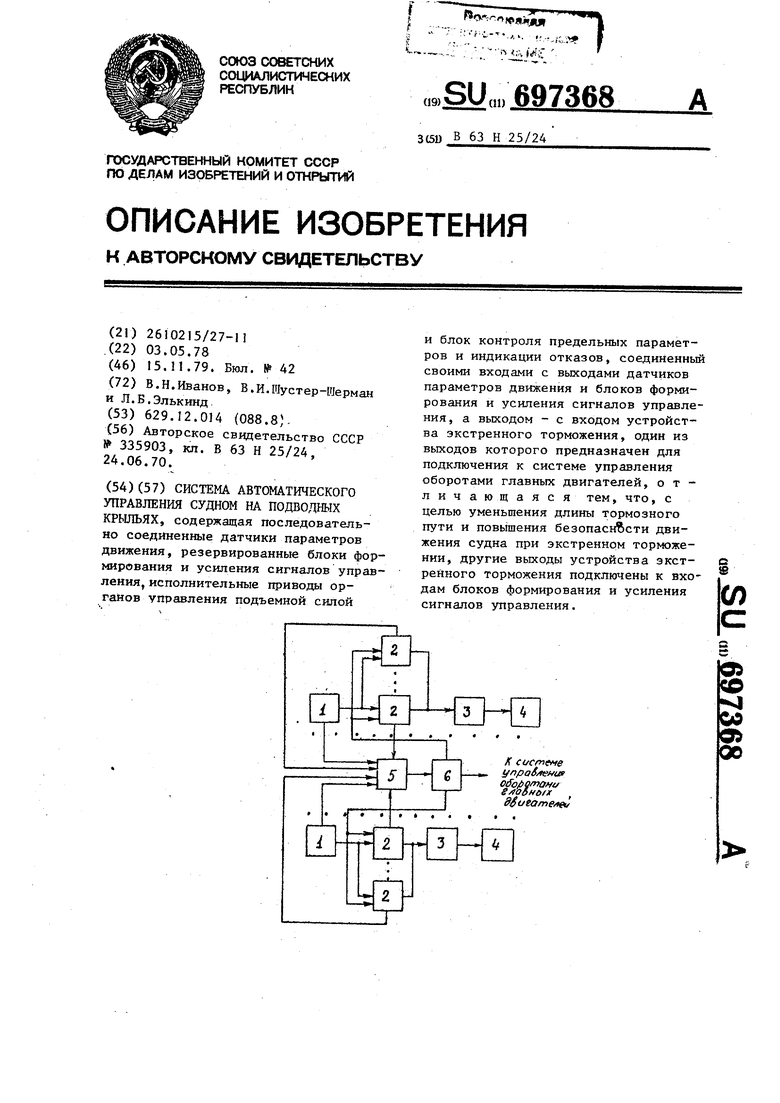
| Авторское свидетельство СССР № 335903, ют | |||
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
