1
Изобретение относится к области автоматического управления движением судов и может быть использовано при создании систем автоматической стабилизации и управления движением современных скоростных судов, в частнос;сти судов на автоматически управляемых подводных крыльях.
Известна система автоматического управления судном на подводных крыльях См угловым и линейным координатам движения - крену, дифференту, высоте центра тяжести и т.д.
Эта система имеет в своем составе каналы управления, каждый из которых формирует сигнал управления по одной координате и подключен выходом ко входам исполнительных приводов поворота соответствующих органов управления - закрылков или рублей.
Однако при действии больших возмуи1ений в этой системе не в полной мере используются возможности орга,нов управления для обеспечения безопасности движения судна.
Ближайшей к изобретению по технической сущности является система автоматического управления судном на подводных крыльях 2, содержащая каналы управления по крену, дифференту, высоте центра тяжести и курсу, а также приводы поворота органов управления - четырех закрылков носового крыла, двух закрылков кормового крыла и двух вертикальных рулей. Выходы каналов управления по крену и высоте центра тяжести подключены ко входам приводов поворота носовых закрылков, выход каналов управления по дифференту - ко входам приводов поворота кормовых закрылков, а выход канала управления по курсу - ко входам приводов поворота вертикальных рулей.
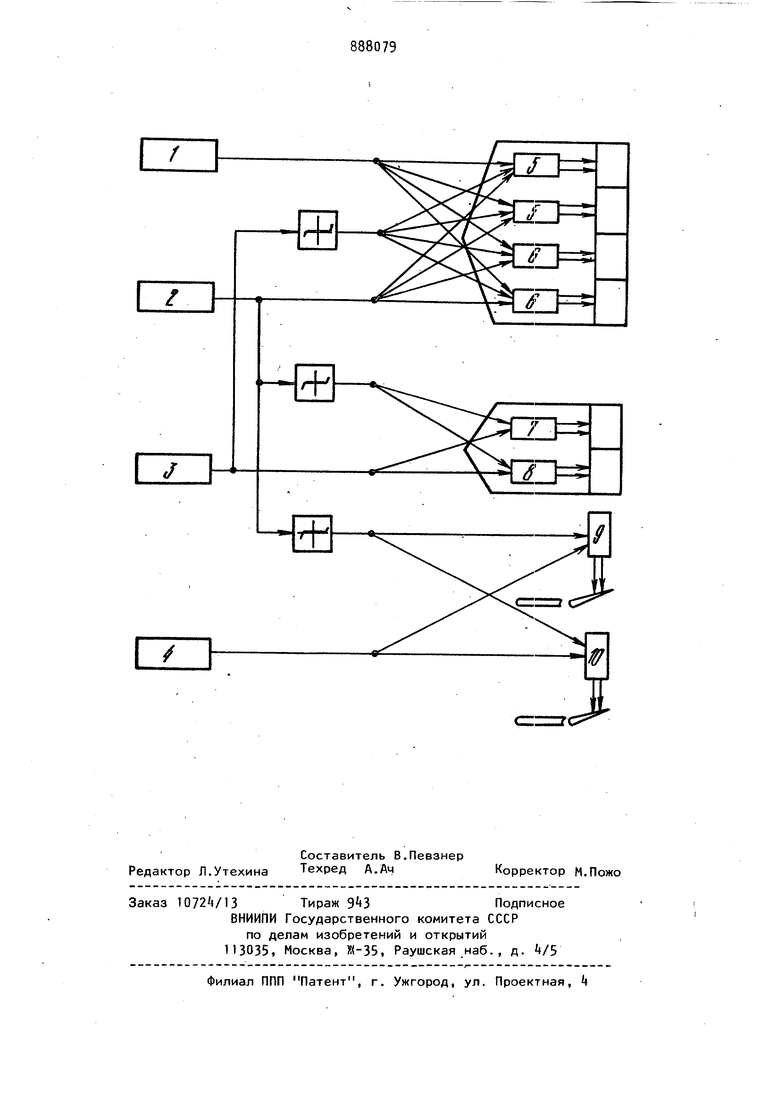
Каждый канал управления совместна с подключенными к нему исполнительными приводами и органами управления при работе образует замкнутый контур регулирования через объект (судно) , обеспечивая автоматическую стабилизацию и управление соответсвующей координатой движения, Таким образом, судно на подводных крыльях при движении в основном режиме автоматически стабилиз11руется по четырем координатам - трем угловым - кре ну, дифференту и курсу и линейной вертикальному перемещению. Однако перечисленные координаты далеко не в равной мере влияют на безопасность движения судна. Наиболь шую опасность для судна представляют большой крен на любой борт, поскольку это связано с возможной потерей остойчивости, и отрицательный дифферент (на нос), поскольку он может привести к резкому переходу судна в водоизмещающий режим, сопровождающий ся значительными ударными нагрузками воздействующими не только на корпус, но и на надстройку. Недостатком известной системы является то, что в ней не в полной мер используются управляющие возможности всех органов управления для предотвращения возможного недопустимого ухудшения стабилизации судна по аварийно опасным координатам. Целью изобретения является повыше ние безопасности движения судна. Эта цель достигается тем,что в си тему, содержащую каналы управления п крену и высоте центра тяжести, выход которых подключены соответственно к первым и вторым входам приводов левы и правых носовых закрылков, канал уп равления по дифференту,выход которого подключен к первым входам приводо левого и правого кормовых закрылков, и канал управления по курсу, выход которого соединен с первыми входами приводов левого и правого вертикальных рулей, введены первое, второе и третье звенья с зоной нечувствительности. Вход первого звена с зоной нечувствительности подключен к выходу канала управления по дифферен ту, а выход - к третьим входам приво дов левых и правых носовых закрылков Вход второго звена с зоной нечувстви тельности подключен к выходу канала управления по крену, а выход - к вторым входам приводов левого и правого кормовых закрылков. Вход третье го звена с зоной нечувствительности ;соединен с выходом канала управления 9 вторыми входами по крену, а выход приводов левого и правого вертикальных рулей. На чертеже приведена, схема предлагаемой системы. Система содержит каналы управления по высоте центра тяжести 1 , крену 2, дифференту 3 и курсу k, приводы поворота левых 5 и правых 6 носовых закрылков , левого 7 и правого 8 кормобых закрылков, левого 9 и правого 10 вертикальных рулей, а также звенья 11, 12 и 13с зоной нечувствительности. Выход канала управления по высоте центра тяжести 1 подключен к первым входам приводов поворота носовых закрылков 5, 6. Выход канала управления по крену 2 подключен ко вторым входам приводов поворота носовых закрылков 5, 6 непосредственно, а кормовых закрылков 7, 8 и вертикальных рулей 9, Ю соответственно через звенья 11 и 12. Выход канала управления по дифференту 3 подключен непосредственно к первым входам приводов поворота кормовых закрылков 7, 8 и через звено П к третьим входам приводов поворота носовых закрылков 5, 6. Выход канала управления по курсу подключен к первым входам приводов 9, Ю поворота вертикальных рулей. Система работает следующим образом. Каждый привод поворота органов управления осуществляет суммирование управляющих сигналов, поступающих на его входы, т.е. перемещение штока привода, а значит и соответствующего органа управления, определяется суммой сигналов на входах привода. Вторые входы приводов поворота правых и левых закрылков при одном и том же входном сигнале осуществляют перекладку штоков приводов в противоположных направлениях, что может быть обеспечено, например, соответствующим включением управляющих входных обмоток. Величина зоны нечувствительности звеньев 12 и 13 выбирается соответствующей значениям углов крена и-дифферента , близких к опасным. При движении судна в крыльевом режиме каждый канал управления совместно с органами управления, к приводам поворота которых он подключен непосредственно, работает в замкнутом через объект (судно) контуре регулирования, обеспечивая автоматическое управление и стабилизацию соответствующего параметра. При этом для стабилизации дифферента, курса и высоты центра тяжести соответствующие органы управления отклоняются синфазно, для стабили зации крена правые и левые носовые за крылки отклоняются противофазно. В некоторых случаях, например при отказах отдельных приводов или при внезапном воздействии на судно непредвиденных.больших возмущений (чрез мерная волна, шквал ветра), выходящих за пределы спецификационных условий эксплуатации в крыльевом режиме, с которыми работающие органы управления не в состоянии справиться, стабилизация по отдельным параметрам, в том числе и по аварийно-опасным: крену и дифференту, может существенно ухудшаться. При этом будут возрастать ошибки стабилизации, а значит и выходные сигналы каналов управления. Если, например, ошибка по дифференту будет приближаться к опасному значению, сигнал на входе звена 11 выйдет на линейный участок характеристики, и сигнал с выхода звена 11 поступит на входы приводов поворота носовых закрылков 5, 6. Последние будут перекладываться, создавая совместно с кормовыми закрылками момент, уменьшающий угол дифферента. Аналогично при приближении угла крена к опасным значениям будут вклю чаться в работу по стабилизации крена дополнительно к носовым закрылкам кормовые закрылки и вертикальные рули. Таким образом, в предлагаемой сис теме более полно используются управляющие возможности закрылков и рулей для компенсации возмущений в каналах стабилизации по аварийно-опасным координатам: крену и дифференту. Это повышает безопасность движения судс системой-прототиа по сравнению ом. Формула изобретения Система управления судном на подводных крыльях, содержащая каналы управления по крену и высоте центра тяжести, выходы которых подключены соответственно к первым и вторым входам приводов левых и правых носовых закрылков, канал управления по дифференту, выход которого подключен к первым входам приводов левого и правого кормовых закрылков, и канал управления по курсу, выход которого соединен с первыми входами приводов левого и правого вертикальных рулей, отличающаяся тем, что, с целью повышения безопасности движения судна, она содержит первое, второе и третье звенья с зоной нечувствительности, причем вход первого звена с зоной нечувствиттельности .подключен к выходу канала управления по дифференту, а выход - к третьим.входам ПРИВОДОВ левых и правых носовых закрылков, вход второго звена с зоной (Нечувствительности подключен к выходу канала управления по крену, а выход - к вторым входам приводов левого и правого кормовых закрылков, вход третьего звена с зоньй нечувствительности соединен с выходом канала управления по крену, а выход - с вторыми входами приводов левого и правоо вертикальных рулей. Источники информации, принятые во внимание при экспертизе 1.Шнерлинг М.Г. Комплексная автоматизация судна на поворотных крыЛях, Тайфун, об, Судостроение № 1, 1975. 2,Авторское свидетельство СССР № 335903, кл. В 63 Н 25/24, 1970 (прототип).
ОН
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС НАВИГАЦИИ И УПРАВЛЕНИЯ ДВИЖЕНИЕМ ДЛЯ АВТОНОМНЫХ НЕОБИТАЕМЫХ ПОДВОДНЫХ АППАРАТОВ | 2011 |
|
RU2483327C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДОВ | 2005 |
|
RU2277495C1 |
| СПОСОБ ОТКАЗОУСТОЙЧИВОГО УМЕРЕНИЯ КРЕНА СУДНА НА ПОДВОДНЫХ КРЫЛЬЯХ | 2013 |
|
RU2531999C1 |
| Буксируемый подводный аппарат, оснащенный гидроакустической аппаратурой для обнаружения заиленных объектов и трубопроводов и последующего их мониторинга | 2015 |
|
RU2610149C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| МОРСКОЙ ПАРОМ | 2002 |
|
RU2276645C2 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
| СИСТЕМА НАВИГАЦИИ АВТОНОМНОГО НЕОБИТАЕМОГО ПОДВОДНОГО АППАРАТА | 2011 |
|
RU2460043C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ПРОВОДКИ СУДНА | 2012 |
|
RU2501708C1 |
| СПАСАТЕЛЬНЫЙ ЭКРАНОПЛАН | 2013 |
|
RU2546357C2 |