Изобретение относится к следящему приводу с асинхронным двигателем, управляемым при помощи опрокидывающего трансформатора и тиратронов. Управление таким приводом может осуществляться через контактную следящую систему, как это описано в авт. св. № 677772 тех же изобретателей. Однако несмотря на свои положительные свойства, контактные следящие системы обладают рядом недостатков, из которых основными являются наличие скользящего контакта в весьма ответственной части - верньерной системе и относительная конструктивная сложность как самой следящей системы, так и вспомогательных устройств, в частности механического дифференциала, зубчатых передач с большим передаточным числом и т. д. Кроме того, сельсины в контактной следящей системе применяются лишь в качестве «электрического вала, в то время как они могут быть использованы в качестве следящей системы. К большим недостаткам контактной следящей системы можно отнести также и то обстоятельство, что в случае равенства скорости задания угла и скорости отработки последнего может иметь место искра На верньерной следящей системе, которая, как известно, ведет к нагреванию и загрязнению контактных поверхностей.
Все изложенное дало повод к разработке устройства с бесконтактной следящей системой, обладающей минимум вращающихся и движущихся элементов, причем последние применяются лищь в местах схемы, работающих относительно напрядшнно.
В предложенном устройстве применена однофазная индукционная система синхронной связи типа системы сельсин с одним датчиком и двумя параллельно включенными приемниками. Один из этих приемников (грубый) выполнен с подвижными первичной и вторичной системами. Первичная система механически соединена с ротором точного приемника и осью исполнительного механизма. Вторичная система механически соединена с контактным устройством, служащим для отключения точной системы и подачи на сетки тиратронов напряжения для
№ 67550- 2 -
поддержания горения последних. Предлагаемое устройство предназначено для работы в напряженных условиях, требующих больших статических и динамических точностей.
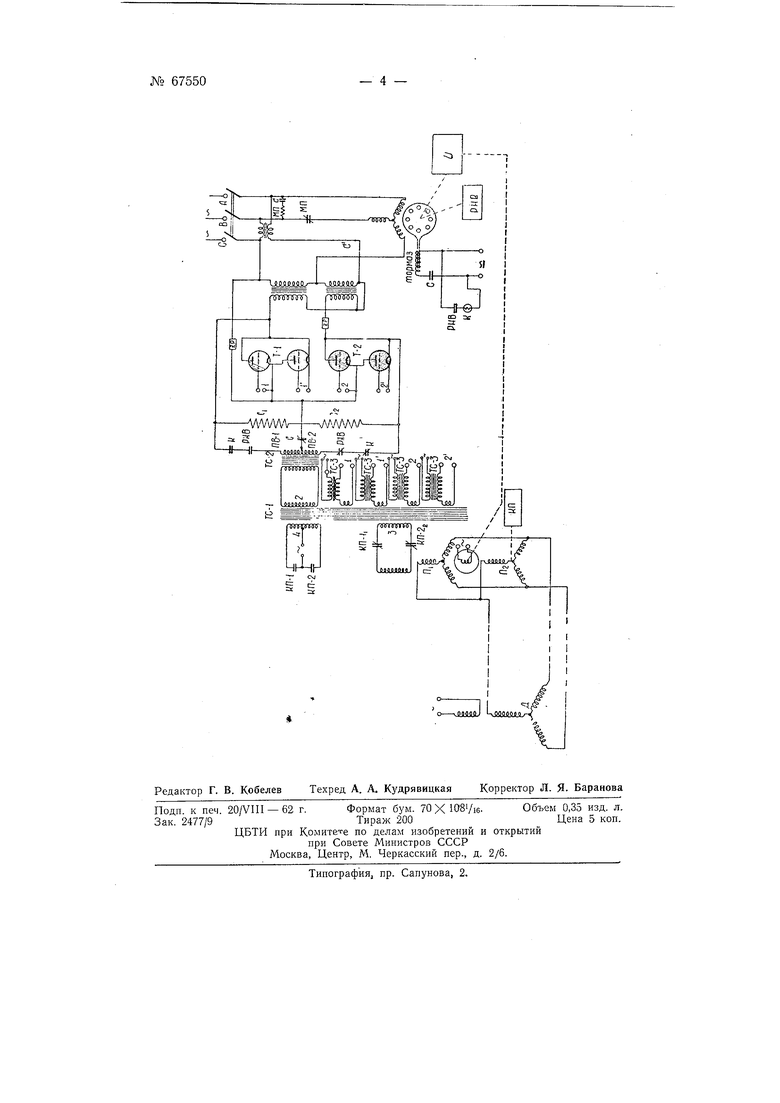
На чертеже изображена схема устройства следящего привода.
В качестве датчика применен сельсин Д, в качестве приемных следящих систем - два сельсина Яь Яз. Ротор верньерной следящей системы - сельсина П соединен с одной стороны со статором сельсина HZ грубой следящей, системы, а с другой - через передачу с исполнительным механизмом И. Ротор сельсина П грубой следящей системы связан с контактным приспособлением /СЯ. Так как применяемые сельсины питаются однофазным переменным током, то роторы их пронизываются однофазным магнитным потоком, который в первом приближении можно считать неизменным по величине и направлению. Этот поток в трех фазах ротора, расположенных в пространстве под углом 120°, индуктирует э. д. с., образующую звезду напряжений. При вращении ротора, синхронно и синфазно с последним вращается звезда напряжений. В приемном сельсине П верньерной следящей системы, обмотка ротора которого соединена с идентичной обмоткой ротора дающего сельсина, образуется однофазный магнитный поток, величина которого определяется параметрами сельсинов.
Таким образом, при повороте звезды напряжения ротора датчика Д магнитный поток неподвижного ротора верньерной следящей системы сельсина П, оставаясь неизменным по величине, поворачивается в пространстве и, следовательно, в обмотке неподвижного статора верньерной следящей системы индуктируется э. д. с. постоянная по фазе. Амплитуду последней в первом приближении можно считать пропорциональной косинусу угла поворота магнитного потока ротора приемника, а следовательно, и ротора датчика. Статорная обмотка сельсина Ях верньерной следящей системы соединена с сеточным трансформатором TC-I, к обмотке которого подводится напряжение, пропорциональное косинусу угла поворота ротора датчика. Если ротор датчика повернуть над углом п (360°+ а°), то магнитный поток ротора сельсина П-i верньерной следящей системы, повернется также на я (360°-|-а°) и э. д. с. обмотки статора верньерной следящей системы ничем не будет отличаться от э. д. с. при повороте на угол а°, т. е. угол в п (360°) пропадает (я - целое число). Чтобы избежать это, необходимо ввести накопление угла поворота. Накопление осуществляет грубая следящая система. С ротором сельсина П- верньерной следящей системы механически связан статор сельсина П грубой следящей системы. Сельсин Яг грубой следящей системы включен по обычиой схеме, и ротор последнего вращается синхронно с ротором датчика. Ротор сельсина HZ грубой следящей системы, как указывалось выше, соединен с контакт- . ным приспособлением КП. При отработке угла исполнительный механизм (j вращает ротор сельсина верньерной следящей системы и связанный с ним статор сельсина грубой следящей системы. Магнитный поток (если угол больше не задается) остается неподвижным относительно ротора верньерной следящей системы и поворачивается синфазно с ним в обратном направлении. В грубой системе магнитные потоки ротора и статора располагаются в пространстве под прямым углом, а так как магнитный поток ротора (если угол больще не задается) неподвижен относительно последнего и статор вращается, то ротор будет вращаться.синфазно с ним в обратном направлении и возвращать контактное приспособление /СЯ в исходное положение. Таким образом, отработка углов, меньших 90°, в рассматриваемой схеме происходит на верньерной следящей системе, а ббльщих - на грубой следящей
системе, причем начинает и кончает отработку всегда верньерная следящая система.
Приводная часть следящего привода представляет собой схему с опрокидывающим трансформатором с применением компенсации. Задача управления двигателем в этой схеме сводится к управлению сеточными напряжениями тиратронов Т-1 и Т-2. Тиратроны эти заперты, так как в цепи их сеток имеется запирающее напряжение, снимаемое с вторичных обмоток трансформатора ТС-3.
Предмет изобретения
1.Следящий привод с асинхронным двигателем и бесконтактной системой управления, воздействующей на цепи сеток ионных приборов в аппарате для реверсирования двигателя при помощи опрокидывающего и сериесных трансформаторов, отличающийся тем, что в нем применена однофазная индукционная система синхронной связи типа системы сель:син с одним датчиком и двумя параллельно включенными приемниками, из которых один - грубый выполнен с подвижными первичной и вторичной системами, механически соединенными - первая с ротором точного приемника и осью исполнительного механизма, а вторая с контактным устройством, служащим для отключения точной системы и подачи на сетки тиратронов напряжения для поддержания горения последних.
2.Форма выполнения следящего привода по п. 1, отличающаяся тем, что, с целью торможения двигателя противовключением, применен трансформатор противовключения, первичная полуобмотка которого шунтирована тиратронами с тем, чтобы при отрабатывании заданного угла и потуха-нии одной из пар тиратронов имела место лодача на сеточный трансформатор напряжения, служащего для отпирания другой пары тиратронов, запирание которых после торможения поставлено в зависимость от положения контактов реле направления вращения.
3.Форма выполнения следящего привода по п. 2, отличающаяся применением в цепи одной из .полуобмоток трансформатора нормально замкнутых контактов реле и его электрического демпфера, а в цепи другой полуобмотки - нормально разомкнутых контактов этих же элементов с тем, чтобы импульс противовключения на тиратроны подавался до момента переключения контактов реле направления вращения.
4.Форма выполнения следящего привода по пп. 2-3, отличающаяся применением двухобмоточного реле, включенного своими об-, мотками параллельно полуобмоткам трансформатора и служащего для отключения последнего, а также всей схемы после отработки угла.
- 3 -№ 67550
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1941 |
|
SU67772A1 |
| Устройство для комплексного управления органами сложного механизма | 1941 |
|
SU67551A1 |
| Устройство для реверсирования трехфазного асинхронного двигателя | 1941 |
|
SU63376A1 |
| Устройство для однофазной индукционной синхронной передачи угла | 1937 |
|
SU55166A1 |
| БЕСКОЛЛЕКТОРНЫЙ ДВИГАТЕЛЬ | 1944 |
|
SU67797A1 |
| Телемеханическое устройство | 1935 |
|
SU48689A1 |
| Синхронно-следящий привод | 1948 |
|
SU76737A1 |
| Устройство для авторегулирования и телемеханики | 1935 |
|
SU48688A1 |
| Устройство для синхронной передачи углов поворота | 1937 |
|
SU54375A1 |
| Бесконтактный электрический датчик линейных перемещений | 1957 |
|
SU116599A1 |