(54) СЛЕДЯ11ДИЙ ПРИВОД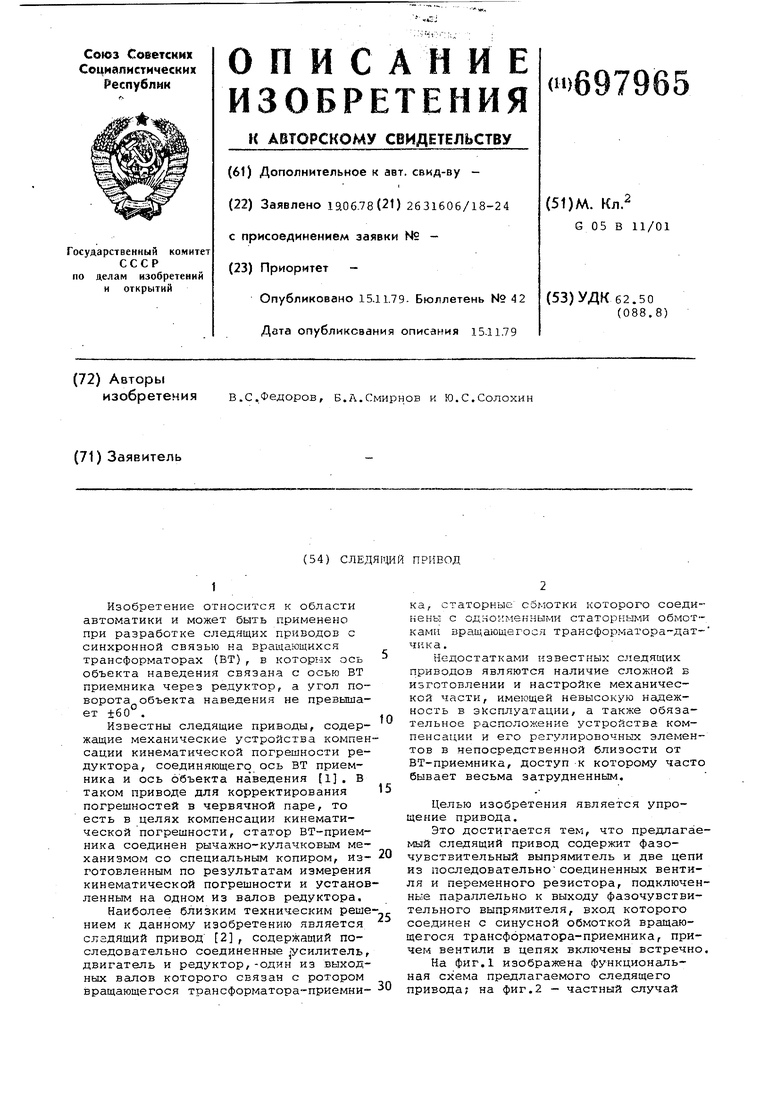
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1985 |
|
SU1297005A1 |
| Способ компенсации кинематической погрешности редуктора | 1978 |
|
SU705176A1 |
| Способ компенсации кинематической погрешности редуктора | 1974 |
|
SU706686A1 |
| Следящий вентильный электропривод | 1982 |
|
SU1241400A1 |
| Цифроаналоговая следящая система | 1989 |
|
SU1783473A1 |
| Способ настройки вентильного электродвигателя | 1989 |
|
SU1742951A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1972 |
|
SU326546A1 |
| СИЙУСНО-КОСИНУСМЬШ ПРЕОБРАЗОВАТЕЛЬ | 1971 |
|
SU316110A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1580554A1 |
| Цифроаналоговая следящая система | 1988 |
|
SU1697055A1 |
Изобретение относится к области автоматики и может быть применено при разработке следящих приводов с синхронной связью на вращающихся трансформаторах (ВТ) , в котор1-лх ось объекта наведения связана с осью ВТ приемника через редуктор, а угол поворота объекта наведения не превышает +60 . Известны следящие приводы, содержащие механические устройства компен сации кинематической погрешности редуктора, соединяющего ось ВТ приемника и ось объекта наведения 1. В таком приводе для корректирования погрешностей в червячной паре, то есть в целях компенсации кинематической погрешности, статор ВТ-приемника соединен рычажно-кулачковым механизмом со специальным копиром, изготовленным по результатам измерения кинематической погрешности и установ ленным на одном из валов редуктора. Наиболее близким техническим реше нием к данному изобретению является следящий привод 2, содержащий последовательно соединенные усилитель, двигатель и редуктор, -один из выходных валов которого связан с ротором вращающегося трансформатора-приемни ка, статорные сбг.гатки которого соединены с одно:-гменными статорными обмотками вращающегося трансформатора-датЧ 1ка. Недостатками известных следящих приводов являются наличие сложной в изготовлении и настройке механической части, имеющей невысокую надежность в эксплуатации, а также обязательное расположение устройства компенсации и его регулировочных элементов в непосредственной близости от ВТ-приемника, доступ к которому часто бывает весьма затрудненным. Целью изобретения является упрощение привода. Это достигается тем, что предлагаемый следящий привод содержит фазочувствительный выпрямитель и две цепи из последовательносоединенных вентиля и переменного резистора, подключенные параллельно к выходу фазочувствительного выпрямителя, вход которого соединен с синусной обмоткой вращающегося трансформатора-приемника, причем вентили в цепях включены встречно. На фиг.1 изображена функциональная схема предлагаемого следящего привода; на фиг.2 - частный случай
K-jMiKMiC iUHH кинематической погрешности редуктора.
Фушсционалъная схема следящего привода содержит вращающийся трансформатор-датчик (ВТ-датчик) 1, соединенный Ч(ггьарехпронодной синхронной связью с вращающимся трансформатором-приемником (ВТ-приемником) 2. Ось ВТ-приемника через редуктор 3 связана с осью объекта наведения и выходным валом двигателя 4, вход которого через усилитель 5 соединен с выходом ВТ-приемника 2. Параллельно косинусной обмотке ВТ-датчика 1 подключен постоянный резистор б, а параллельно синусной обмотке ВТ-датчика 1 подключен вход фазочувствительного выпрямителя (ФЧВ) 7, к выходу которого подключены две параллельные цепи, состоящие из включенных последовательно переменных резисторов 8, 9 и вентилей (например диодов) 10, 11.
Вследствие того, что ось ВТ-приемника 2 и ось объекта наведения соединены через редуктор 3, в передаче углового положения от оси ВТ-приемника до оси объекта наведения имеется кинематическая погрешность, которая не .обеспечивается приводом.
При проведении настроечных работ со следящим приводом вначале определяют ошибку между угловым положением оси ВТ-датчика 1 и оси объекта наведения во всем диапазоне рабочих углов. Кинематическая погрешность зубчатых передач, как правило, имеет близкую к синусоидальной зависимость от угла поворота объекта наведения. Поэтому синусоидальная часть ошибки положения определяется кинематической погрешностью редуктора. Подключение несимметричных активных нагрузок параллельно обмоткам ВТ датчика вносит в синхронную связь поправку, носящую синусоидальный характер, которая при соответствующем подборе величины нагрузки и ограниченных углах поворота объекта наведения может в основном скомпенсировать синусоидальную составляющую кинематической погрешности.
Однако амплитуды синусоидальных зависимостей от угла поворота кинематической погрешности и поправки могут не совпадать.
Для исключения этого недостатка . к синусной обмотке ВТ-датчика подключен, пассивный ФЧВ 7, входное сопротивление которого полностью определяется его нагрузкой на . К выходу ФЧВ 7 подключень две па)аллельные цепи, содержащие каждая переменный резистор и диоды, причем диоды включены встречно. Так как фаза напряжения синусной обмотки ВТ-датчика меняется на 180 при переходе привода через нулевое положение, то аналогично будет изменяться полярность постоянного напряжения д на выходе ФЧВ 7. Вследствие этого имеется возможность изменять активную нагрузку отдельно для каждого направления вращения редуктора, а значит и компенсировать кинематическую погрешность, меняющую свою величину в зависимости от направления вращения редуктора.
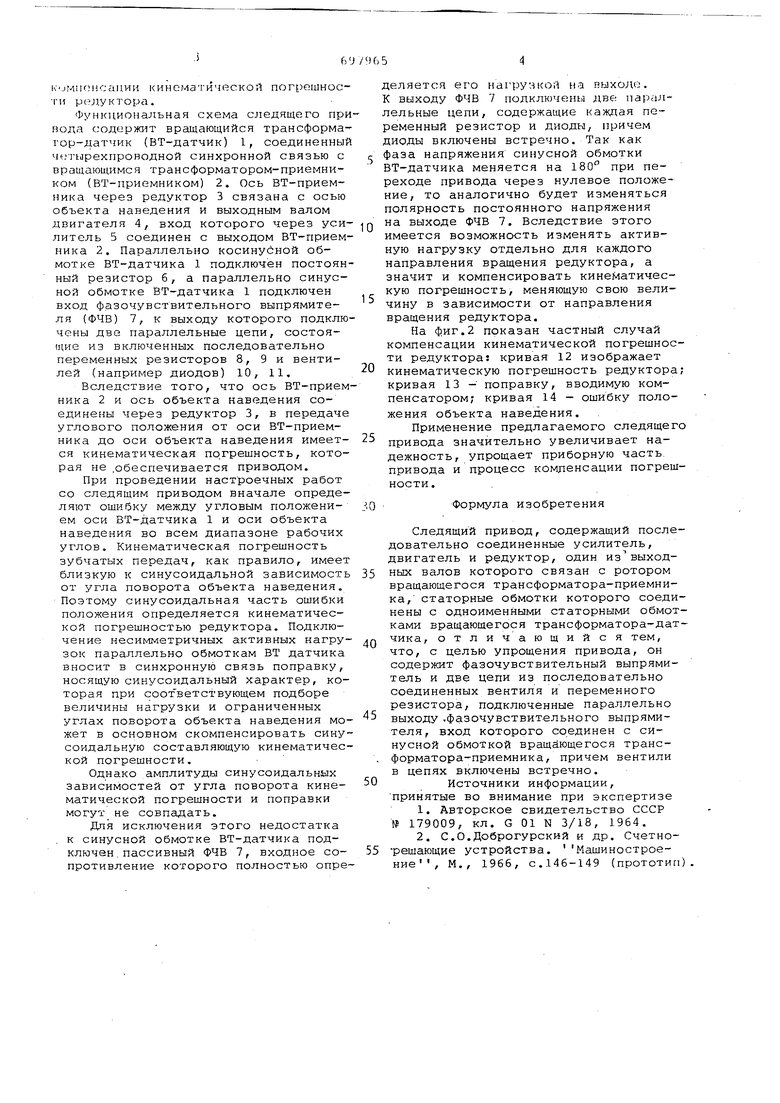
На фиг.2 показан частный случай компенсации кинематической погрешности редуктора: кривая 12 изображает
кинематическую погрешность редуктора; кривая 13 - поправку, вводимую компенсатором; кривая 14 - ошибку положения объекта наведения.
Применение предлагаемого следящего привода значительно увеличивает надежность, упрощает приборную часть, привода и процесс компенсации погрешности.
Формула изобретения
Следящий привод, содержащий последовательно соединенные усилитель, двигатель и редуктор, один из выходных валов которого связан с ротором вращающегося трансформатора-приемника, статорные обмотки которого соединены с одноименными статорными обмотками вращающегося трансформатора-датчика, отличающийся тем, что, с целью упрощения привода, он содержит фазочувствительный выпрямитель и две цепи из последовательно соединенных вентиля и переменного резистора, подключенные параллельно
выходу .фазочувствительного выпрямителя, вход которого соединен с синусной обмоткой вращающегося трансформатора-приемника, причем вентили в цепях включены встречно.
Источники информации,
принятые во внимание при экспертизе
