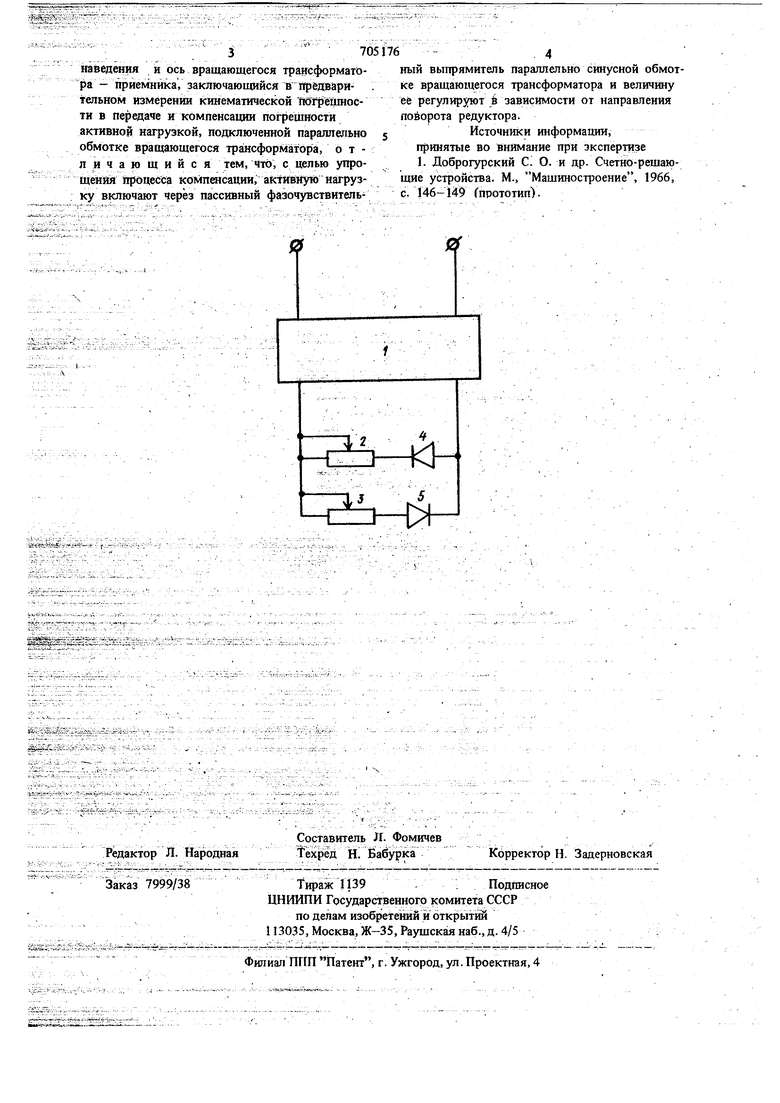
Изобретение относится к редукторостроению и может быть использовано для компенсации л инематических погрешностей в приводах. Известен способ компенсации кинематической погрешности редуктора, соединяющего ось объекта навед ия и ось вращающегося трансформатора-приемника, заключающийся в предварительном измерении кинематической погрешности в передаче и компенсации погреш ности активной нагрузкой, подключенной параллельно обмотке вращающегося трансформа тора 1. При этом производят дополнительные сложные расчеты активной нагрузки. Целью изобретения является упрощение процесса компенсации погрешностей. Для этого активную нагрузку включают через пассивный фазочувствительный вьшрямител параллельно синусной обмотке вращающегося трансформатора и величину ее регулируют в зависимости от направления поворота редуктора. На чертеже . схема устройства, осу ществляющего данный способ. Устройство содержит пассивный фазочувствительный выпрямитель 1, вход которого подключйют в синхронную связь параллельно синусной обмотки вращающегося трансформатора (на чертеже не показан) к выходу подключают две параллельные цепи, состоящие из переменных резисторов 2 и 3 и диодов 4 и 5, причем диоды включают встречно. При вращении привода и переходе его через нулевое положение фаза напряжения синусной обмотки вращающегося трансформатора меняется на 180°, благодаря чему появляется возможность изменять активную нагрузку отдельно для каждого направления вращения редуктора и, следовательно, компенсировать кинематическую погрешность, меняющую свой знак и величину в зависимости от направления вращения редуктора. Предлагаемый способ позволяет упростить процесс компенсации кинематической погрещности редуктора и повысить точность компенсации погрещностей. Формула изобретения Способ компенсации кинематической погрещности редуктора, соединяющего ось объекта
наведения и ось вращающегося трансформатора - приемника , заключающийся в предварительном измерении кинематической ШГрёщности в передаче я компенсации погрешности активной нагрузкой, подключенной параллельно обмотке вращающегося трансформатора, отличающийся тем, что, с цепью упрощения процесса компенсации, аКтИвну нагрузку включают через пассивный фазочувствительный выпрямитель параллельно синусной обмотке вращающегося трансформатора и величину ее регулируют и зависимости от направления поворота редуктора.
Источники информации, принятые во внимание при экспертизе 1. Доброгурский с; О. и др. Счетно-рещающие устройства. М., Машиностроение, 1966, с. 146-149 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящий привод | 1978 |
|
SU697965A1 |
| Способ компенсации кинематической погрешности редуктора | 1974 |
|
SU706686A1 |
| Устройство для контроля погрешности вращаюшихся трансформаторов | 1972 |
|
SU451119A1 |
| Следящий привод | 1985 |
|
SU1297005A1 |
| Способ компенсации погрешностиСиСТЕМы диСТАНциОННОй пЕРЕдАчиуглА | 1977 |
|
SU830489A1 |
| Устройство для определения точности вращающегося трансформатора | 1975 |
|
SU565354A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Двухотсчетный преобразователь уголкод | 1974 |
|
SU482785A1 |
| Следящая система | 1981 |
|
SU999014A1 |
| Устройство для проверки многополюсных датчиков угла | 1975 |
|
SU525151A1 |
Внчс
