Изобретение относится к автоматическому управлению и предназначено для управления нелинейными неопределенными нестационарными динамическими объектами.
Предполагается, что динамика объекта описьгеается уравнением
у(Ч f(t,y,y,..., ) U(t), .
где f(t,y,y,..., ) - некоторая непрерывная по координатам у,у,..,, у (.rs-0 функция, описывающая структуру и свойства регулируемого объекта. Считается, что функция f(t,y, у, . . . ,) при всех у,у,..., y(ti-O) меняется неконтролируемым образом, определена с точностью до класса и удовлетворяет условиям
f(t,y,y,..., )(У,У,....);
где f/ (у гУ, . . ,.) некоторая известная функция, выделяющая класс ре- 1 улируемых объектов такая, что
f(0,0.
,0) О;
, О
коэффициенты которого с. (i,..., n-l),Cj 1 являются соответствую- 25 щими коэффициентами первых усилителей 5, ,5, . . . ,5п. Таким образом, если с,,с,.4,,сц.таковы, что полином (I) - гурвицев, то при соответствующем выборе структур функциональ- для всех у,у,.. ., . Предполагает- 30 блоков, реализующих функции f ся также, что функция м(у,У замкнутая система будет асимптотически устойчива. При выборе структуры блока 9, реализующего функцию
) удовлетворяет следующему условию:
П-1
21
f
,(
+ .y..)./А
следует исходить из соотношения
35
соб(у,У,...,) где об (у,)
n-i
z:
uo
до
некоторая
м(У.У,.... )f (t,y,y,....y - ).
(2)
которое должно быть выполнено для всех t г tjj и всех у,у,. . . , функция, непрерывная по У,у, , . .)-40 Выбор коэффициента усиления k,,
Задача управления состоит в сведе- второго усилителя 11 производится та- нии к нулю ошибки регулирования X у - у при произвольном начальном состоянии и в обеспечении малой
45
КИМ образом, чтобы для всех t tpИ
всех у,у,. отнощение
Ди-М
бьшо выполнено соП-1
(1-8) Ч(
i-О
to
(i-B)f +
n-2
n(c.ч, )
, ()
(3)
где
s некоторая константа, удовзависимости свойств управляемых процессов в замкнутой системе от неконтролируемого изменения функции f. Полагаем, что у О, при с 5-г. , т.е. X у.
Цель изобретения - повышение точ- 50 летворяющая неравенствам ности и качества системы управления „ (с;,1).Кроме того,константа § нелинейным объектом.itUn-i
На чертеже представлена схема сие- назначается таким образом чтобы динамическая система,описываемая уравнениями
темы автоматического управления нелинейными объектами.
Схема содержит объект 1 управления, блок 2 сравнения, задатчик 3, дифференциаторы 4,4,.,.,4, соответствующих порядков, первые усилите55
V1 V
) - 141
пч УПИ - ТИ.
,«1
1
c;yi
.,п-2; о Z,
(4)
ли 5,,5,.,.,5,цервый сумматор 6, первые модульные элементы 7, ,7,.,., 7 г,. , второй сум 1атор 8, первый нелинейный функционалъный блок 9, реализуювщй функцию д, второй нелинейный функциональный блок 1 О, реализующий функцию об, второй усилитель 11, первый умножитель 12, третий усилитель 13, второй модульный элемент 14, второй умножитель 15, третий сумматор 16, релейный элемент 17, третий умножитель 18, интегратор 19.
На этапе синтеза системы при выборке коэффициентов усиления в первых усилителях 5,,5,...,5 следует исходить из того,что динамика управляемых процессов в описьшаемой системе оиределяется корнями следующего характеристического полинома
rt-l
Р + с„.,р +...+ с,,р + с, 0,(1)
коэффициенты которого с. (i,..., n-l),Cj 1 являются соответствую- 25 щими коэффициентами первых усилителей 5, ,5, . . . ,5п. Таким образом, если с,,с,.4,,сц.таковы, что полином (I) - гурвицев, то при соответствующем выборе структур функциональ- 30 блоков, реализующих функции f замкнутая система будет асимптотически устойчива. При выборе структуры блока 9, реализующего функцию
f
/А
следует исходить из соотношения
второго усилителя 11 производится та
КИМ образом, чтобы для всех t tpИ
всех у,у,. отнощение
Ди-М
бьшо выполнено соП-1
(1-8) Ч(
i-О
to
n-2
n(c.ч, )
, ()
где
s некоторая константа, удовлетворяющая неравенствам „ (с;,1).Кроме того,константа § itUn-i
55
V
- 141
пч - ТИ.
,«1
1
c;yi
.,п-2; о Z,
(4)
была асимптотически устойчива при любой функции z;(t), удовлетворяющей
j условию (zli TlR- Cl+C;) |у;1 .
г-1
что для всех О « 8 : асимптотически усИзвестно, что, если полином (I) - гурвицев, то всегда существует такая константа о, О, SB система (4) тойчива.
Выбор структуры блока 10, реализующего функцию oi, и коэффициента усиления k , третьего усилителя 13 следует проводить таким образом, чтобы сигнал (Х/ на выходе третьего
усилителя удовлетворял при всех
Лп-il
t 5 t., и у, у.
,У
условию
2(i±SL
if
г(Ь 1|
,(f
К
Система управления работает следующим образом.
Сигнал у с выхода задатчика 3 сравнивается с сигналом у с выхода объекта 1 управления в блоке 2 сравнения. Полученньй сигнал ошибки х поступает непосредственно на вход первого усилителя 5 и на вход первого модульного элемента 7{, а на входы первых усилителей 52,5,...,5 и первых модульных элементов 7,7, ...,7п - через дифференциаторы соответствующих порядков.
Сигналы с выходов блока 2 сравнения и дифференциаторов подаются на входы первого 9 и второго 10-нелинейных функциональных блоков, форми
рующих функции f и об как результат соответствующего нелинейного преобразования сигнала координаты ошибки и ее производных. Сигналы, полученные на выходе первых модульных элементов 7, ,7 , . .. ,7 , суммируются с сигналом, полученным на выходе первого нелинейного фцнкционального блока 9, во втором сумматоре 8 и подаются через второй усилитель 11 на вход первого умножителя 12; сигналы с выходов первых усилителей 54,5, ...,5 подаются на входы первого сумматора 6.
Полученная на выходе первого сумматора 6 линейная комбинация сигнала ошибки и ее (п-1)-й производной является ошибкой контура координатно параметрической обратной связи б , она подается на вход второго модульного элемента 14, последовательно
соединеиного с вторым умножителем 15, а также на вход третьего схтмматора 6, на второй вход которого подается сигнал с второго умножителя 15. г Сигнал, полученный на выходе третьего сумматора 16, преобразуется релейным элементом 7 и подается на вход третьего умножителя 18, на второй вход которого подается сигнал с выШ хода второго нелинейного функционального блока 10, пропущенный через третий усилитель 13. С выхода третьего умножителя 18 сигнал подается на вход интегратора 19. Сигнал, полученный
t5 на выходе интегратора 19, подается на вторые входы первого 12 и второго 15 умножителей.
В рассматриваемой системе контур координатной обратной связи образо20 ван блоком 2 сравнения, дифференциаторами 4, ,4 ,... ,4(,., , первыми модульными элементами
,д 7( ,7 ,. .. ,7 , первым нелинейным функциональным блоком 9, вторым сумматором 8, вторым усилите25 лем 1I и первым умножителем 12, а контур координатно-параметрической обратной связи - первыми .усилителями 5 ,5,.. . 5j, первым сумматором 6, вторым модульным элементом 14, вто30 рым умножителем 15, третьим сзшмато- ром I6, релейным элементом 17, третьим умножителем . 18, интегратором 19, вторым нелинейным функциональным блоком 1 О и третьим усилителем I3. Нали35 чие в указанных контурах нелинейных функциональных блоков 9 и 10 и их характеристики предопределены нелинейной структурой регулируемого объекта.
40
,д
5
д
5
Формула изобретения
Бинарная система управления нелинейными объектами, содержащая последовательно соединенные первьш умножитель, объект управления, блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы кото PBIX и выход блока сравнения соединены через соответствующие первые усилители с входами первого сумматора, выход которого через последовательно соединенные первый модульный элемент, второй умножитель, второй сумматор, релейный элемент, третий умножитель и интегратор соединен с первым входом первого умножителя, выход первого сумматора соединен с вхо5 13056316
дом второго сумматора, а выход ин-она содержит третий усилитель, пертегратора - с вторым вьпсодом второговьш и второй нелинейные функциональумножителя, выходы дифферендиаторовные блоки, к входам которых подключе
через соответствующие вторые модуль-вы входы вторых модульных элементов,
ные элементы, третий сумматор и вто- выход первого нелинейного функциорой усилитель подключены к второмунального блока подключен к входу
входу первого умножителя, о т л и -третьего сумматора, выход второго не
чающаяся тем, что, с цельюлинейного функционального блока чеповьшения точности и качества систе-рез третий усилитель подключен к вто
мы управления нелинейным объектом,JQ Рому входу третьего умножителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2013 |
|
RU2513847C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ С САМОНАСТРОЙКОЙ ДИНАМИЧЕСКОГО КОРРЕКТОРА ДЛЯ АПРИОРНО НЕОПРЕДЕЛЕННЫХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО СОСТОЯНИЮ | 2014 |
|
RU2538295C1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
Изобретение относится к систе-ч мам автоматического управления. Цель изобретения - повышение точности и качества системы управления нелинейным объектом. В регулятор введены усилитель 13 и два нелинейных функциональных блока 9,10 и новые связи. За счет этого реализуется возможность управления нелинейными неста - ционарными объектами, повышаются точность и качество регулирования. 1 ил. 00 сд Si 00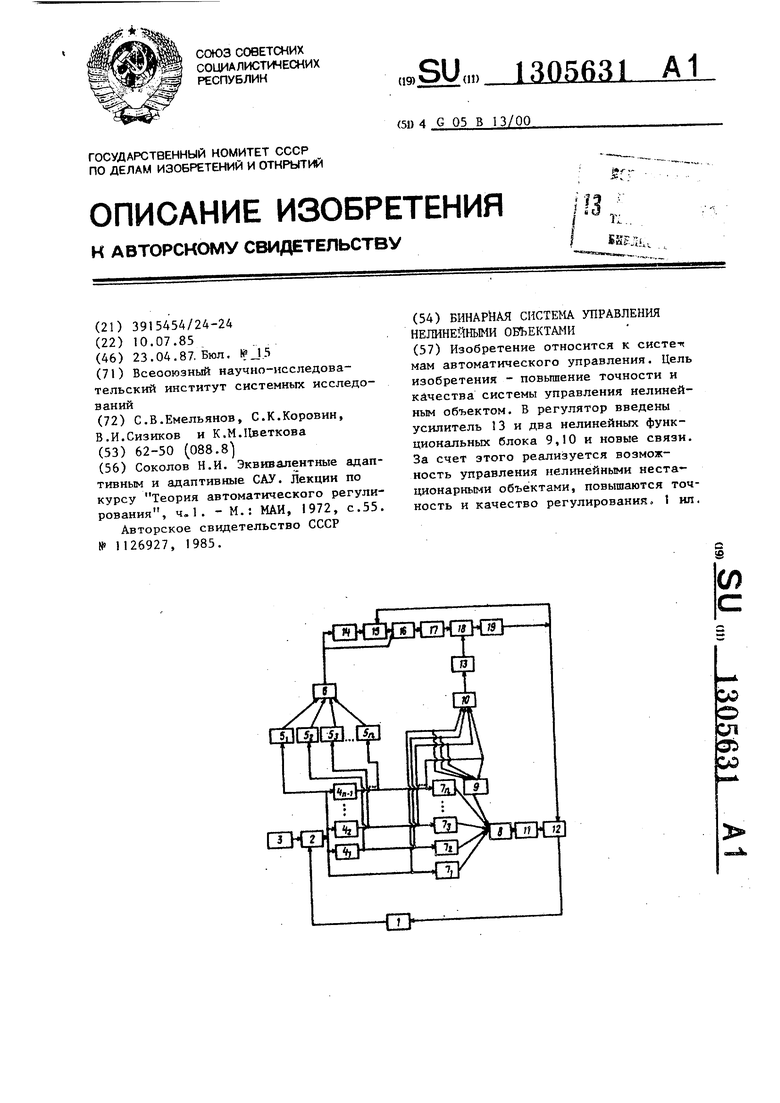
| Соколов Н.И | |||
| Эквивалентные адаптивным и адаптивные САУ | |||
| Лекции по курсу Теория автоматического регулирования, 4,1 | |||
| - М.: МАИ, 1972, с.55 | |||
| Топка с несколькими решетками для твердого топлива | 1918 |
|
SU8A1 |
