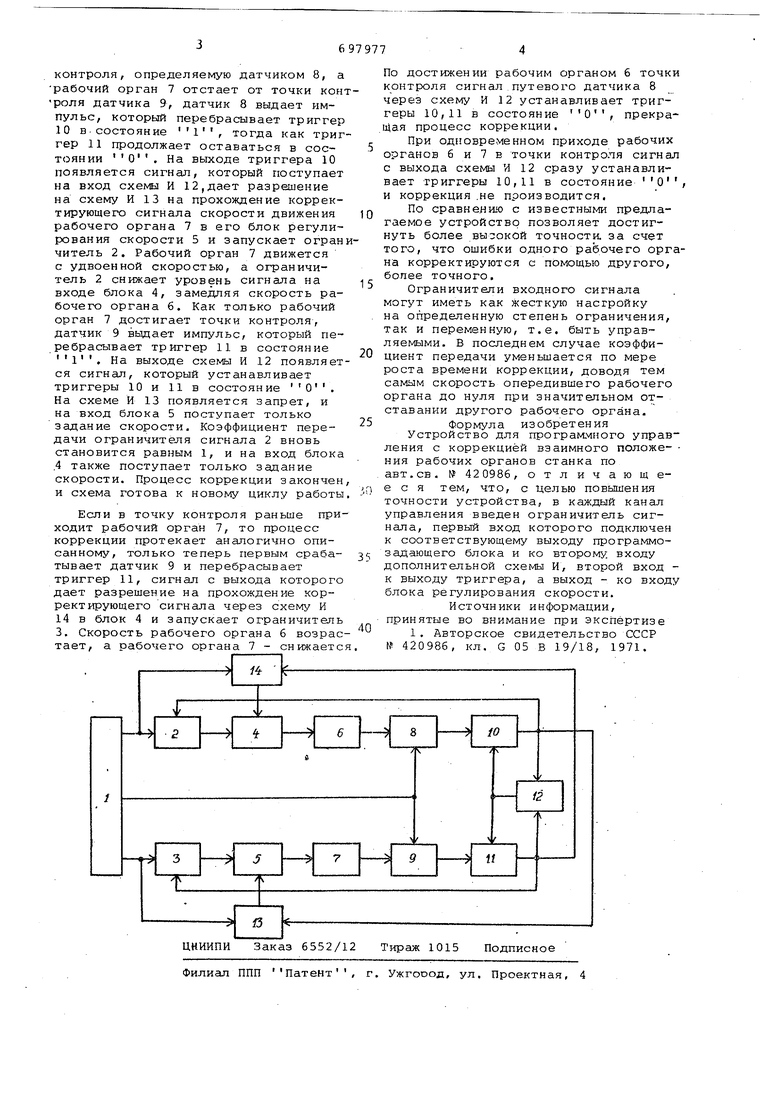
контроля, определяемую датчиком 8, а рабочий орган 7 отстает от точки кон роля датчика 9, датчик 8 выдает импульс, который перебрасывает триггер 10 в.состояние , тогда как триг гер 11 продолжает оставаться в состоянии О. На выходе триггера 10 появляется сигнал, который поступает на вход схемы И 12,дает разрешение на схему И 13 на прохождение корректирующего сигнала скорости движения рабочего органа 7 в его блок регулирования скорости 5 и запускает огран читель 2. Рабочий орган 7 движется с удвоенной скоростью, а ограничитель 2 снижает уровень сигнала на входе блока 4, замедляя скорость рабочего органа 6. Как только рабочий орган 7 достигает точки контроля, датчик 9 выдает импульс, который перебрасывает триггер 11 в состояние . На выходе схемы И 12 появляет ся сигнал, который устанавливает триггеры 10 и 11 в состояние О. На схеме И 13 появляется запрет, и на вход блока 5 поступает только задание скорости. Коэффициент передачи ограничителя сигнала 2 вновь становится равным 1, и на вход блока .4 также поступает только задание скорости. Процесс коррекции закончен и схема готова к HOBoiviy циклу работы Если в точку контроля раньше при ходит рабочий орган 7, то процесс коррекции протекает аналогично описанному, только теперь первым срабатывает датчик 9 и перебрасывает триггер 11, сигнал с выхода которого дает разрешение на прохождение корректирующего сигнала через схему И 14 в блок 4 и запускает ограничитель 3. Скорость рабочего органа б возрас тает, а рабочего органа 7 - снижаетс По достижении рабочим органом 6 точки контроля сигнал,путевого датчика В через схему И 12 устанавливает триггеры 10,11 в состояние О, прекращая процесс коррекции. При одновременном приходе рабочих органов 6 и 7 в точки контроля сигнал с выхода схемы И 12 сразу устанавливает триггеры 10,11 в состояние О, и коррекция .не производится. По сравнению с известными предлагаемое устройство позволяет достигнуть более высокой точности, за счет того, что ошибки одного рабочего органа корректируются с помощью другого, более точного. Ограничители входного сигнала могут иметь как жесткую настройку на определенную степень ограничения, так и переменную, т.е. быть управляемыми. В последнем случае коэффициент передачи уменьшается по мере роста времени коррекции, доводя тем самым скорость опередившего рабочего органа до нуля при значительном отставании другого рабочего органа. Формула изобретения Устройство для программного управления с коррекцией взаимного положе- ния рабочих органов станка по авт. св. f 420986, отл ичающее с я тем, что, с целью повышения точности устройства, в каждый канал управления введен ограничитель сигнала, первый вход которого подключен к соответствующему выходу программозадающего блока и ко второму входу дополнительной схемы И, второй вход к выходу триггера, а выход - ко входу блока регулирования скорости. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 420986, кл. G 05 В 19/18, 1971.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ С КОРРЕКЦИЕЙ ВЗАИМНОГО ПОЛОЖЕНИЯ РАБОЧИХ ОРГАНОВ СТАНКА | 1971 |
|
SU420986A1 |
| Устройство для управления рабочим органом землеройно-транспортной машины | 1982 |
|
SU1082914A1 |
| Электропривод черпаковой цепи драги | 1980 |
|
SU861481A1 |
| Робототехнический комплекс | 1990 |
|
SU1726235A1 |
| Тренажер оператора радиоэлектронной аппаратуры | 1989 |
|
SU1658193A1 |
| Многопрограммный регулятор температуры | 1983 |
|
SU1087951A1 |
| Устройство управления подачей топлива в двигатель внутреннего сгорания | 1979 |
|
SU859665A1 |
| Устройство для регулирования температуры полосы в процессе прокатки | 1985 |
|
SU1304950A2 |
| Частотноуправляемый электропривод переменного тока | 1982 |
|
SU1086535A1 |
| Помехоустойчивый кодек для передачи дискретных сообщений | 1990 |
|
SU1727201A2 |
