1
Изобретение относится к технике программного управления движением рабочих органов станков, в частности намоточных.
Известно устройство для программного управления с коррекцией взаимного положения рабочих органов станка, содержащее программозадающий блок, первую схему «И и соединенные с соответствующими рабочими органами блоки регулирования скорости и путевые датчики.
Известпое устройство характеризуется сложностью измерения и преобразования оппибок перемещений и ввода поправок. При этом корректирующий сигнал воздействует только на систему регулирования скорости одного рабочего органа па всем участке между контрольными точками. Это приводит к увеличению времени компенсации рассогласования.
Цель изобретения - увеличение быстродействия устройства.
Поставленная цель достигается тем, что в предлагаемое устройство введены два триггера и две дополнительные схемы «И, соединенные с блоками регулирования скорости, другие входы которых объединены со входами соответствующих дополнительных схем «И и подключены к выходам программозадающего блока, соединенного с путевыми датчиками, подключенными к триггерам, выходы которых
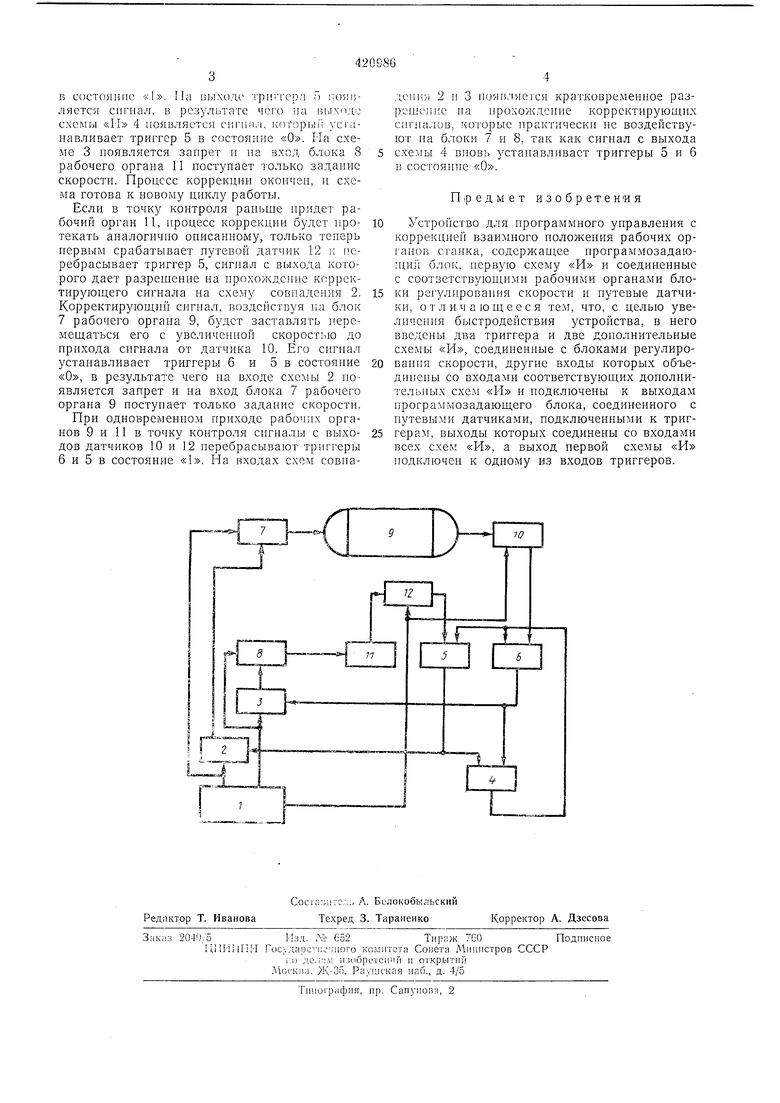
соединены с входами всех схем «И, а выход первой схемы «И подключеп к одному из входов триггера. На чертеже изображена структурная схема
устройства для программного управления с коррекцией взаимного положения рабочих органов станка.
Устройство содержит программозадающий блок 1, схемы совпадения «И 2, 3 и 4, триггеры 5, 6, блоки регулирования скорости 7, 8, первый рабочи1 орган 9, путевые датчики первого рабочего органа 10, второй рабочий орган 11, путевые датчики второго рабочего органа 12.
Устройство работает следующим образом.
Пусть в процессе работы рабочий орган 9 первым приходит в точку контроля, определяемую путевыми датчиками 10 и 12. Датчик 10 выдает импульс, который перебрасывает триггер 6 в состояние «1. Па выходе триггера 6 появляется сигнал, который подается на вход схемы «И 4 и дает разрешение на схему «Pi 3 на прохождение корректирующего сигнала скорости движения рабочего органа 11
в его блок регулирования скорости 8. Рабочий орган 11 перемещается с увеличенной скоростью, пока достигнет положения, определяемого путевым датчиком 12. Последний выдает импзльс, который перебрасывает триггер 5
Б состояние «1. Па иыходс- триггера : поя ляется сшыал, в результате чего па выходе схемы «М 4 появляется ciiriinji, которыГ уеганавливает триггер 5 в состояние «О. На схеме 3 появляется запрет и па вход блока 8 рабочего органа 11 поступает только задание скорости. Процесс коррекции окоичен, и схема готова к новому циклу работы.
Если в точку контроля раньше придет рабочий орган 11, процесс коррекции будет протекать аналогично описанному, только теперь первым срабатывает путевой датчик 12 и перебрасывает триггер 5, сигнал с выхода которого дает разрешение на прохождение корректирующего сигнала па схему совпадения 2. Корректирующий сигиал, воздействуя па блок 7 рабочего органа 9, будет заставлять перемещаться его с увеличеппой скоростью до прихода сигнала от датчика 10. Его сигнал устанавливает триггеры 6 и 5 в состояние «О, в результате чего на входе схемы 2 появляется запрет и па вход блока 7 рабочего оргаиа 9 поступает только задание сг орости.
При одиовремеипом приходе рабочих органов 9 и 11 в точку контроля сигналы с выходов датчиков 10 и 12 перебрасывают триггеры 6 и 5 в состояние «1. На входах схем совпадештя 2 н 3 пояп.тяегся кратковременное разpcHKMine па прохождение корректирующих сиг11алов, которые практически не воздействуют на блоки 7 п 8, так как сигнал с выхода схемы 4 вновь устанавливает триггеры 5 и 6 в состояние «О.
П|редмет изобретения
Устройство для программного управления с коррекцией взаимного положения рабочих станка, содержащее программозадаю1щ-т блок, первую схему «И и соединенные с соответствующими рабочими органами блоки регулирования скорости и путевые датчики, отличающееся тем, что, с целью увеличения быстродействия устройства, в него введены два триггера и две дополнительные схемы «И, соедипенные с блоками регулирования скорости, другие входы которых объединены со входами соответствующих дополнительпых схем «И и подключены к выходам программозадающего блока, соединеииого с путевыми датчиками, подключенными к триггерам, выходы которых соединены со входами всех схем «И, а выход первой схемы «И подключен к одному из входов триггеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления с коррекцией взаимного положения рабочих органов станка | 1978 |
|
SU697977A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЗАПУСКОМ ИСПОЛНИТЕЛЬНОГО ОРГАНА ПУТЕВОЙ МАШИНЫ | 1998 |
|
RU2144966C1 |
| Устройство программного управления подвижным объектом | 1977 |
|
SU653189A1 |
| ЦИФРОВАЯ ПНЕВМОГИДРАВЛИЧЕСКА: ПРОГРАММНО-СЛЕДЯЩАЯ СИСТЕМА | 1971 |
|
SU428359A1 |
| Бесконтактный командоаппарат | 1979 |
|
SU826278A1 |
| Устройство для программного управления | 1985 |
|
SU1273883A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ДАВЛЕНИЯ | 1969 |
|
SU241137A1 |
| Устройство для автоматического копирования линии сварного соединения | 1985 |
|
SU1243916A1 |
| Устройство для управления загрузкой самоходной уборочной машины | 1987 |
|
SU1628911A1 |
| Устройство программного управления | 1981 |
|
SU1012205A1 |
