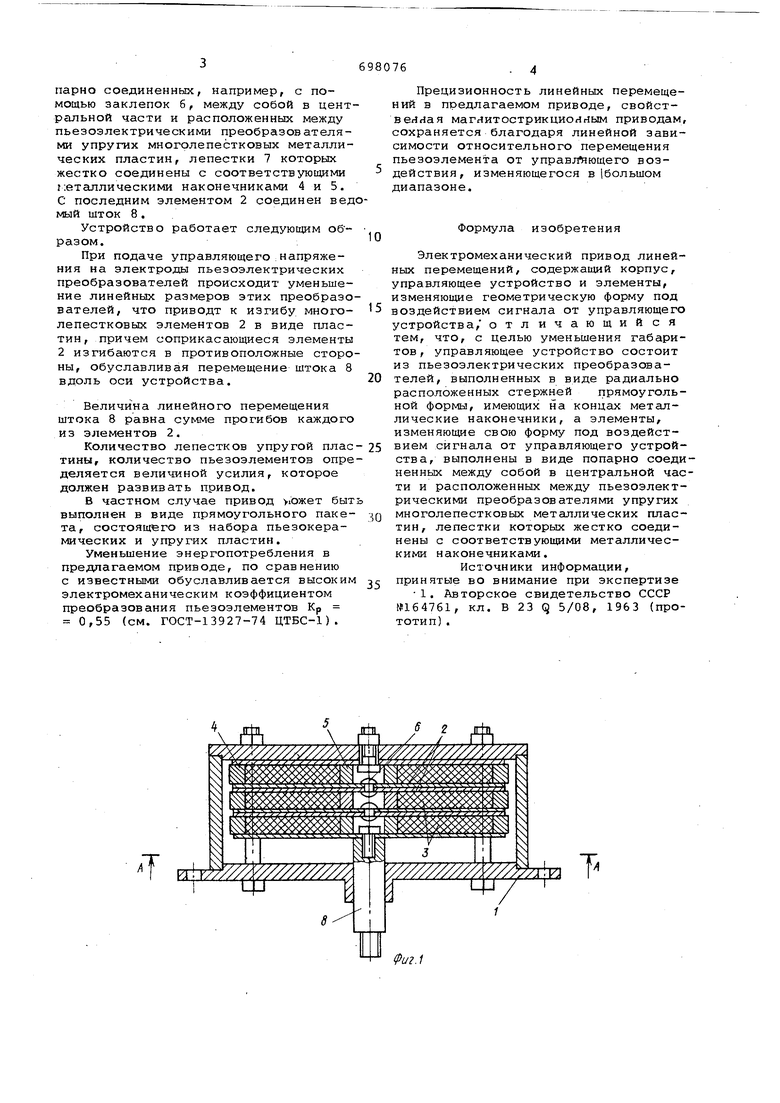
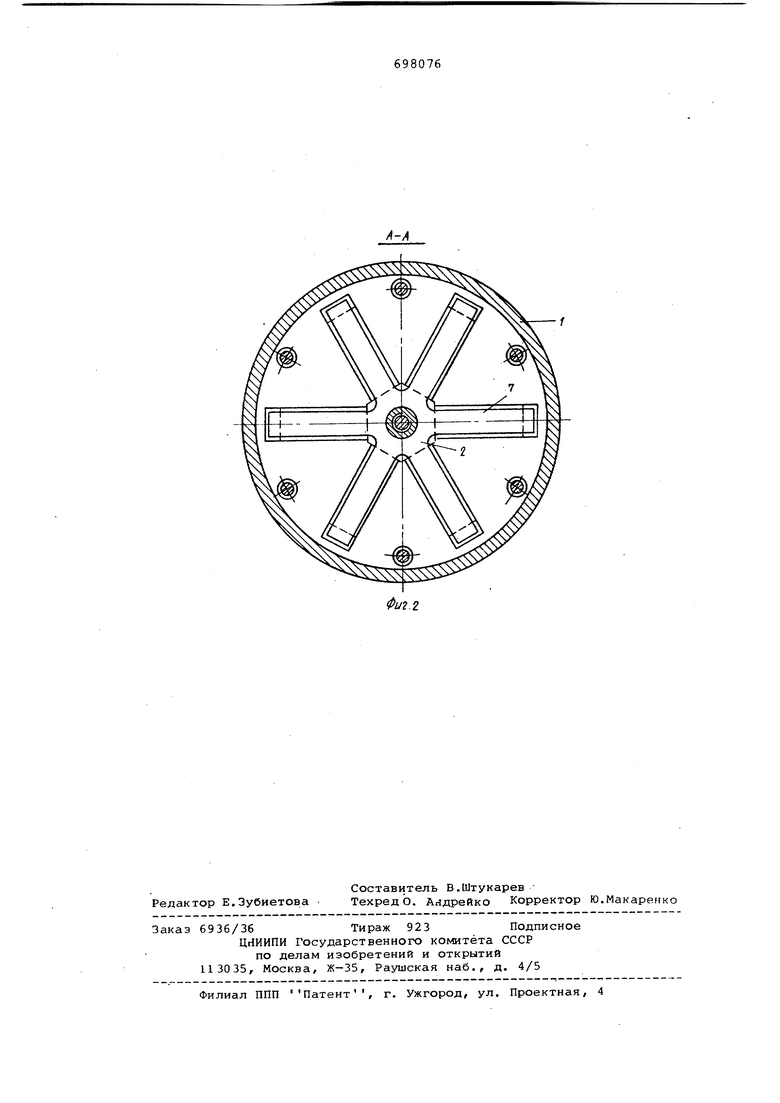
Изобретение относится к области электромеханических приводов и может быть использовано в приборостроении, арматуростроении, различных областях радиотехники, в экспериментальной физике. Известен электромеханический привод линейньЕС перемещений, содержащий корпус, управляющее устройство и эле менты, изменяющие геометрическую форму под воздействием сигнала от /управляющего устройства. Управляющее устройство включает катушкуj создаиощее магнитное поле, а изменение геометрической формы осуществляется под воздействием этого магнитого поля 1 Недостатком известного привода яв Д1яется большое энергопотребление, связанное с созданием сильных электромагнитных полей. Кроме того, известные материалы обладают малыми коэффициентами магнитострикции (не более 10), что приводит к возрастанию габаритов устройств, обеспечиваю щих заданные линейные перемещения. Целью изобретения является уменьшение габаритов. Постсшленная цель достигается тем что управляющее устройство состоит из пьезоэлектрических преобразовасе лей, выполненных в виде радиально расположенных стержней прямоугольной формы, имеющих на концах металлические наконечники, а элементы, изменяющие свою форму под воздействием сигнала от управляющего устройства, выполнены в виде попарно соединенных между собой в центральной части и расположенных между пьезоэлектрическими преобразователями упругих многолепестковых металлических пластин, лепестки которых жестко соединены с соответствующими металлическими наконечниками . На фиг. 1 изображен предлагаемый привод, разрез; на фиг. 2 - сечение А-А н а фи г. 1. Привод содержит корпус 1, управляющее устройство и элементы 2, изменяющие геометрическую форму под воздействием сигнала от управляющего устройства. Управляющее устройство состоит из пьезоэлектрических преобразователей, выполненных в виде радиально расположенных стержней 3 прямоугольной формы, имеющих на концах металлические наконечники 4 и 5. Элементы 2, изменяющие свою форму под воздействием сигнала от упраьляющего устройства, выполнены в виде попарно соединенных, например, с помощью заклепок 6, между собой в цент ральной части и расположенных между пьезоэлектрическими преобразователями упругих многолепестковнх металлических пластин, лепестки 7 которых жестко соединены с соответствующими 1:еталлическими наконечниками 4 и 5. С последним элементом 2 соединен вед мый шток 8. Устройство работает следующим образом. При подаче управляющего напряжения на электроды пьезоэлектрических преобразователей происходит уменьшение линейных размеров этих преобразо вателей, что приводт к изгибу многолепестковых элементов 2 в виде пластин, причем соприкасающиеся элементы 2 изгибаются в противоположные сторо ны, обуславливая перемещение штока 8 вдоль оси устройства. Величина линейного перемещения штока 8 равна сумме прогибов каждого из элементов 2. Количество лепестков упругой плас тины, количество пьезоэлементов опре деляется величиной усилия, которое должен развивать привод. В частном случае привод уюжет быт выполнен в виде прямоугольного пакета, состоящего из набора пьезокерамических и упругих пластин. Уменьшение энергопотребления в предлагаемом приводе, по сравнению с известными обуславливается высоким электромеханическим коэффициентом преобразования пьезоэлементов Кр 0,55 (см. ГОСТ-13927-74 ЦТБС-1). Прецизионность линейных перемещений в предлагаемом приводе, свойственная магнитострикционным приводам, сохраняется благодаря линейной зависимости относительного перемещения пьезоэлемента от управл 1ющего воздействия, изменяющегося в |большом диапазоне. Формула изобретения Электромеханический привод линейных перемещений, содержащий корпус, управляющее устройство и элементы, изменяющие геометрическую форму под воздействием сигнала от управляющего устройства, отличающийся тем, что, с целью уменьшения габаритов, управляющее устройство состоит из пьезоэлектрических преобразователей, выполненных в виде радиально расположенных стержней прямоугольной формы, имеющих на концах металлические наконечники, а элементы, изменяющие свою форму под воздействием сигнала от управляющего устройства, выполнены в виде попарно соединенных между собой в центральной части и расположенных между пьезоэлектрическими преобразователями упругих многолепестковых металлических пластин, лепестки которых жестко соединены с соответствующими металлическими наконечниками. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР №164761, кл. В 23 Q 5/08, 1963 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для получения вращательного движения | 1976 |
|
SU605644A1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2002 |
|
RU2212672C1 |
| ПЬЕЗОАКТЮАТОР (ВАРИАНТЫ) | 2018 |
|
RU2690732C1 |
| ПРЕЦИЗИОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 1992 |
|
RU2083052C1 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ПРИВОД ИЛИ ДВИГАТЕЛЬ, СПОСОБ ПРИВЕДЕНИЯ ЕГО В ДЕЙСТВИЕ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 1997 |
|
RU2179363C2 |
| ВЕКТОРНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ВИБРОПРЕОБРАЗОВАТЕЛЬ | 2007 |
|
RU2347228C1 |
| Устройство для получения вращательного движения | 1979 |
|
SU795366A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| ПРОЦЕСС СОЗДАНИЯ НАНОВИБРАЦИОННОГО ПОКРЫТИЯ ДЛЯ МЕДИЦИНСКИХ УСТРОЙСТВ С ИСПОЛЬЗОВАНИЕМ НЕСКОЛЬКИХ ВИДОВ КОЛЕБАНИЙ ТОНКОГО ПЬЕЗОЭЛЕМЕНТА | 2005 |
|
RU2419395C2 |
| УСИЛИВАЮЩИЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР ПОВЫШЕННОЙ ТОЧНОСТИ ПОЗИЦИОНИРОВАНИЯ | 2016 |
|
RU2624773C1 |
Т
Т
Фи2.1
