Изобретение относится к области приборостроения и может быть использовано в качестве исполнительного электромеханического привода.
Известно устройство для получения вращательного движения, содержащее волновую передачу с деформируемым элементом и электромеханический привод, образованный пьезоэлектрическими преобразователями в виде стержней, бдин конец которых оперт в неподвижное основание, а другой - в деформируемый элемент.
Недостатками данного устройства являются большой габарит в рациональном направлении и незначительный выходной момент, обусловленный фрикционным контактом в волновой передаче,. Эти недостатки устранены в устройстве для получения вращательного движения, содержащем волновую передачу с деформируемым элементом и электромеханический привод, образованный составными пьезоэлектрическими преобразователями, закрепленными последовательно по торцам, и расположенными симметрично оси передачи в распор между неподвижным основанием и деформируемым элементом.
. Пьезоэлектрические преобразователи в этом устройстве выполнены в виде концентрично расположенных втулок, торцы которых последовательно жестко соединены. Это позволило применить волновые зубчатые и резьбовые передачи и повысить несущую (нагрузочную) способность устройства. Однако недостатком этого устройства является сложность конструкции, обусловленная широкой номенклатурой типоразмеров пьезоэлементов (втулок или колец различных диаметров), что усложняет их производство и контроль.:
Целью изобретения является упрощение конструкции устройства и повышение технологичности его изготовления.
Поставленная цель Достигается тем, что в устройство для получения вращательного движения, содержит волновую передачу с деформируемым элементом и электромеханический привод, образованный составными пьезоэлектрическими преобразователями, закрепленными последовательно по торцам, и расположенными симметрично оси передачи в распор между неподвижным основанием и деформируемым элементом, пьезоэлектрические преобразователи выполнены в виде системы параллельно установленных одиночного и. симметричных относительно него, парных стержней, торцы которых соединены пластинами, причем в пластине, обращенной к неподвижному основанию, имеется отверстие, в котором размещен одиночный стержень.
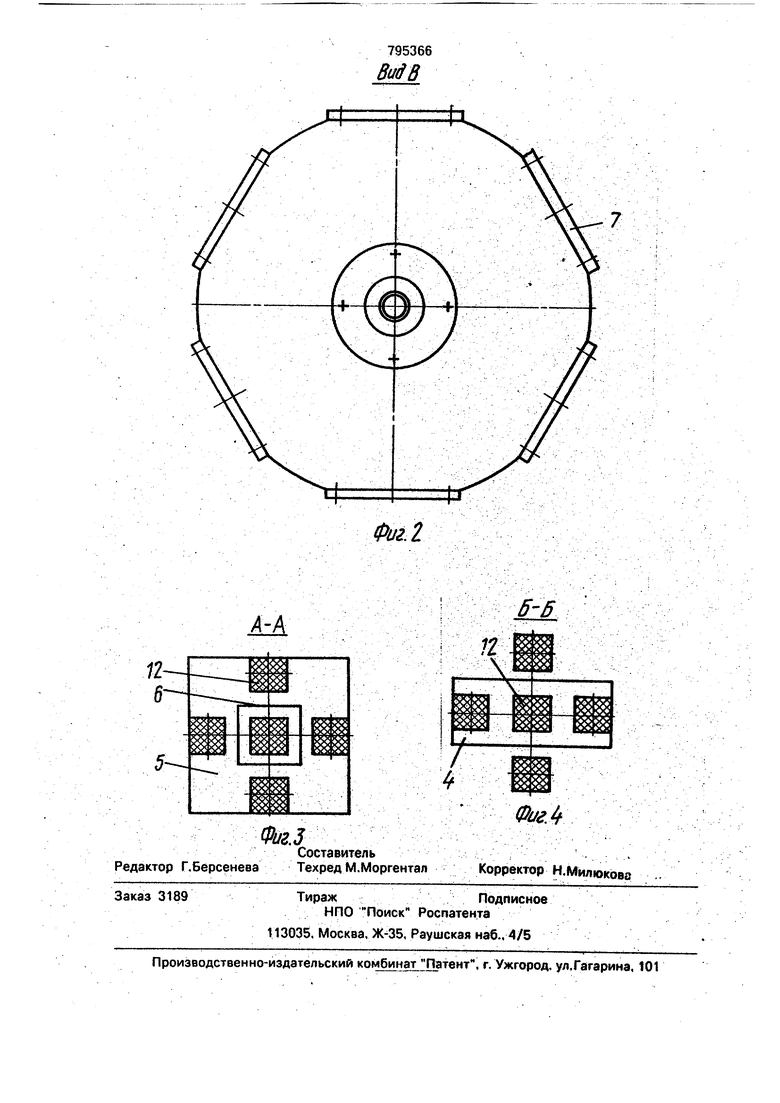
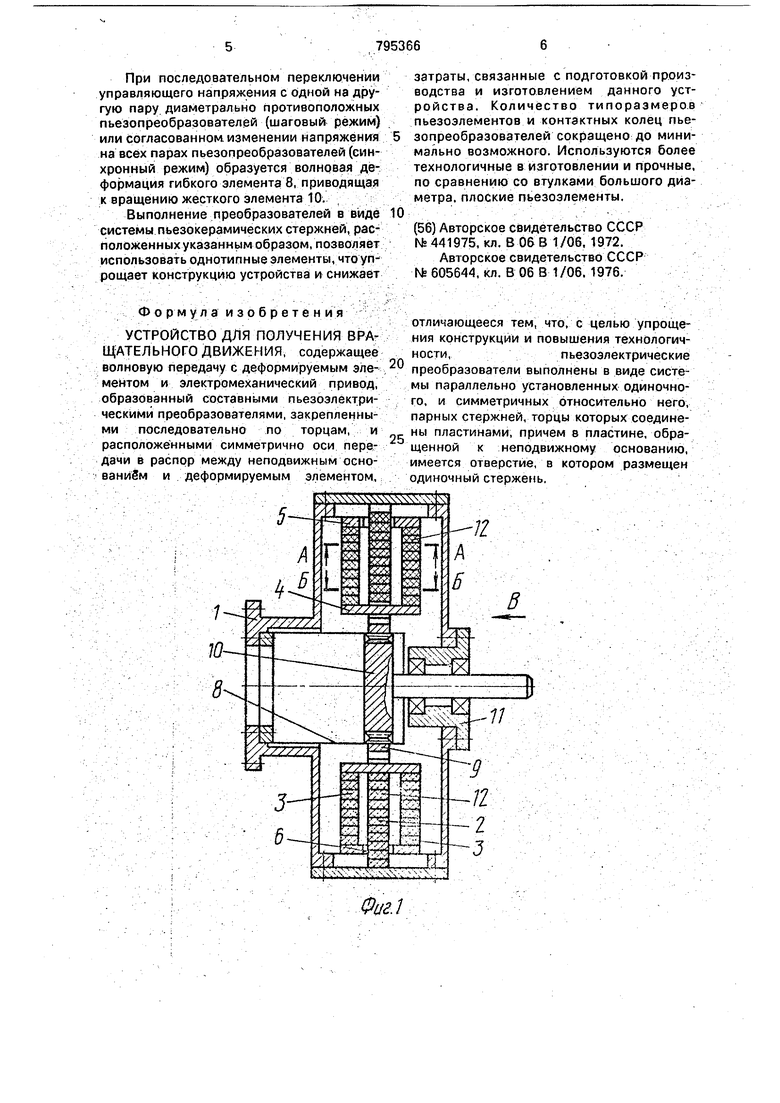
На фиг. 1 изображено устройство в разрезе; на фиг, 2 - вид В, на фиг. 3 - разреэ
А-А фиг, 1; на фиг. 4 - разрез Б-Б фиг. 1.
Устройство состоит из корпуса 1, на котором в радиальных направлениях равномерно по окружности установлены пьезоэлектрические преобразователи, вы0 полненныё в виде системы из параллельно установленных одиночного пьезокерамйческого стержня 2, и симметрично расположённых относительно него, парнщх , пьезокерамических стержней 3, торцы кото
5 рых последовательно жестко соединены при помощи пластин 4, 5.
Одиночные пьезОкерамйческие стержни установлены 8 отверстиях 6, выполненных в пластинах 5, соединяющих торцы
0 парныхпьезокерамическихстержней, обращенных к опорной пластине 7.
Пьезопреобразователи взаимодействуют с гибким элементом 8 через планки 9 и соединены жестко с неподвижным основанием (корпусом) посредством пластин 7. Жесткое звено 10 находится в зацеплении с гибким элементом 8 и установлено в подшипниковой опоре 11/
Пьезоэлектрические преобразователи
0 выполнены в виде системы пьезокерамических стержней, состоящих из склеенного набора плоских пьезоэлементов (шайб) 12, между которыми установлены токопроводящие прокладки (на чертеже не показаны),
5 Устройство работает следующим образом. С помощью коммутатора на электроды пьезокерамического преобразователя подаются напряжения, благодаря которым линейные размеры преобразователей
0 изменяются.
В зависимости от знака разности потенциалов, приложенных к пьезопреобразователям, последние испытывают деформацию сжатия или растяжения. Причем, одновременно подаваемые напряжения на пьеэопреобразователи, работающие на растяжение и Сжатие, должны быть обратной полярности.
Так, если одиночный пьезоэлектрический
0 стержё1нь будет испытывать деформацию растяжения, парные пьезокерамические стержни, расположенные в плоскости, проходящей черед ось передачи - сжатие, а парные пьезокерамические стержни, расположенные в
5 плоскости,перпендикулярной оси передачирастяжения. ,При этом свободный конец с планкой 9 получит перемещение в направлении центральной оси волновой передачи, равное сумме абсолЮтныхлинейных деформаций трех названных стержней.
При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных пьезопреобразователей (шаговый режим) или согласованном изменении напряжения на всех парах пьезопреобразователей (синхронный режим) образуется волновая деформация гибкого элемента 8, приводящая к вращению жесткого элемента 10.
Выполнение преобразователей в виде системы пьезокерамических стержней, расНоложенныхуказанным образом, позволяет использовать однотипные элементы, что упрощает конструкцию устройства и снижает
Форму л а изобретен и я
УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАг Щ-АТЕЛЬНОГО ДВИЖЕНИЯ, содержащее волновую передачу с деформируемым элементом и электромеханический привод, образованный составными пьезоэлектрическими преобразователями, закрепленными последовательно по торцам, и расположенными симметрично оси передачи в распрр между неподвижным основанийм и деформируемым элементом.
затраты, связанные с подготовкой производства и изготовлением данного устройства. Количество типоразмеров пьезоэламентов и контактных колец пьезопреобразователей сокращено до минимально возможного. Используются более технологичные в изготовлении и прочные, по сравнению со втулками большого диаметра, плоские пьезозлементы.
(56) Авторское свидетельство СССР № 441975, кл. В 06 В 1/06, 1972.
Авторское свидетельство СССР hfe 605644, кл. В 06 В 1/06, 1976.
отличающееся тем, что; с целью упрощения конструкции и повышения технологичности,пьезоэлектрические преобразователи выполнены в виде систе мы параллельно установленных одиночного, и симметричных относительно него, парных стержней, торцы которых соединеJ. ны пластинами, причем в пластине, обращенной к неподвижному основанию, имеется отверстие, в котором размещен одиночный стержень.
12
Фцг.1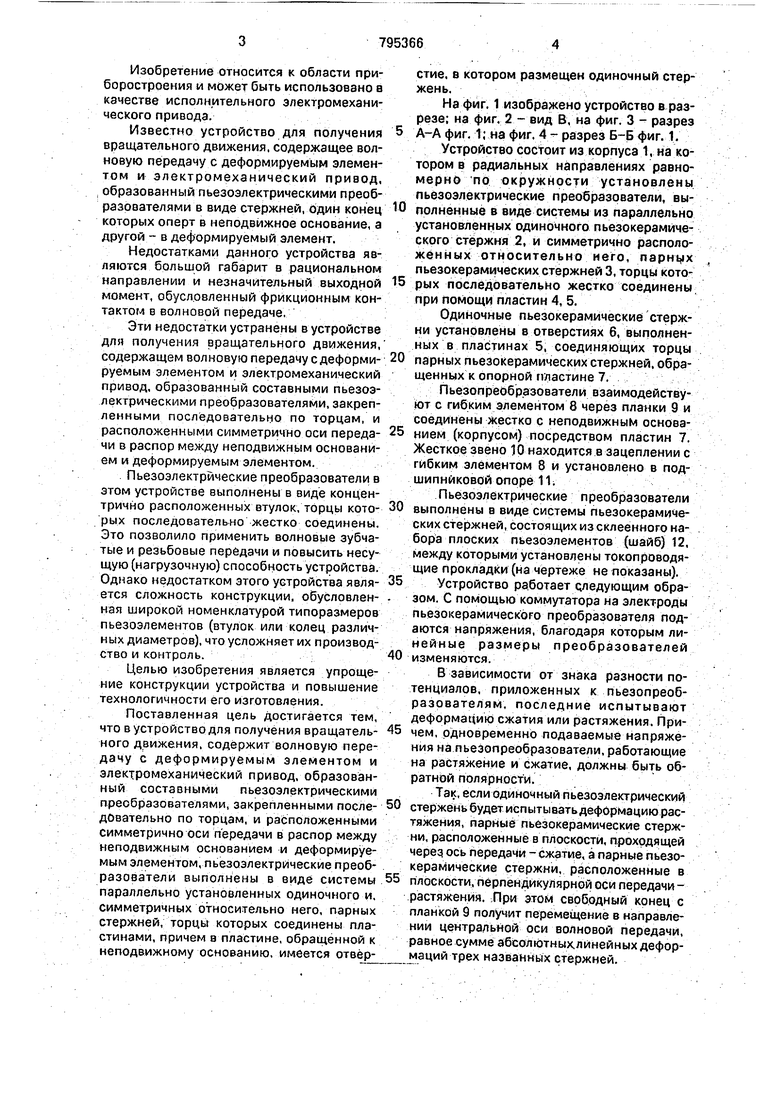
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В.А. | 2015 |
|
RU2600953C1 |
| Устройство для получения вращательного движения | 1986 |
|
SU1402207A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Устройство для получения вращательного движения | 1976 |
|
SU605644A1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| "Устройство для получения вращательногодВижЕНия | 1979 |
|
SU842307A2 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| Устройство для получения вращательного движения | 1986 |
|
SU1453101A2 |
| Устройство для получения вращательного движения | 1983 |
|
SU1093842A2 |
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДАТЧИК УСКОРЕНИЯ | 2002 |
|
RU2212672C1 |