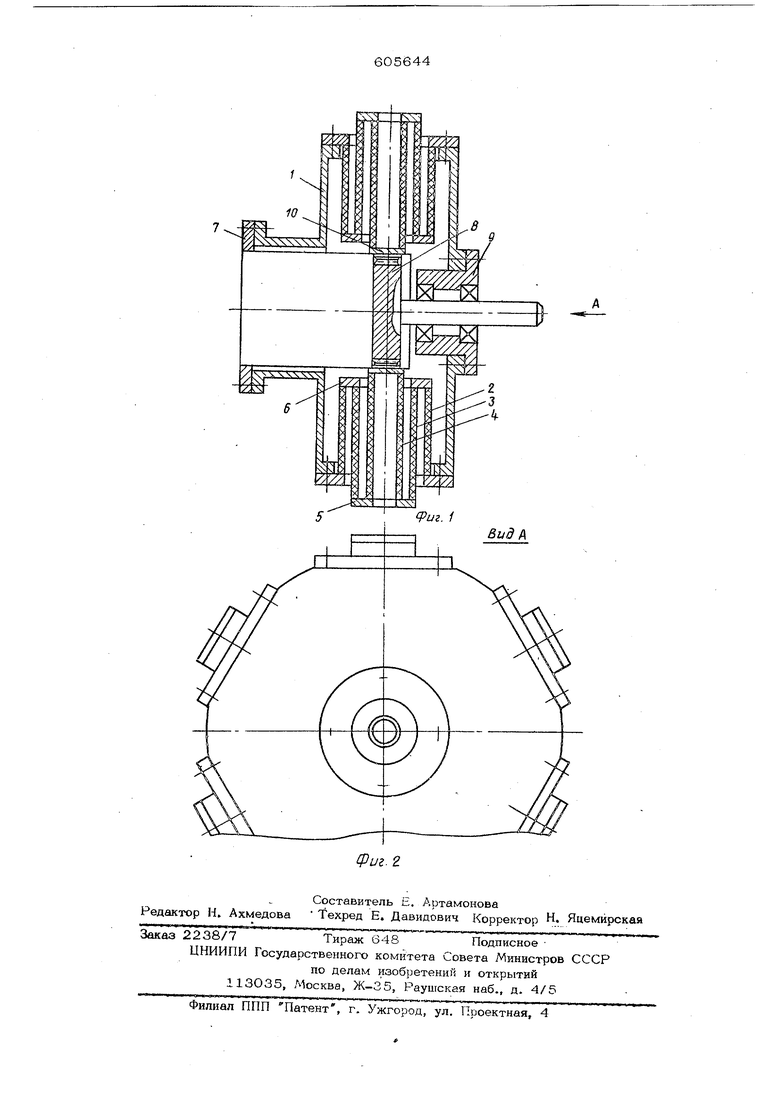
Устройство состоит из корпуса 1, на котором установлены в радиальных направлениях равномерно по окружности пьезоэлектри ческие преобразователи, выполненные в виде втулок 2, 3, 4, торцы которых последовател но жестко соединены при помощи шайб 5, б например, пайкой, гибкого зубчатогх) элемента 7, установленного неподвижно в расточке корпуса 1 (неподвижного основания), и жесткого зубчатого элемента 8, установ- ленного в подшипниковой опоре 9. Пьезопреобразователи взаимодействуют с гибким эл ментом 7 через шайбы 10. Устройство работает следующим образом, С помощью коммутатора на электроды пьезоэлектрического преобразователя подаются напряжения, благодаря которым линейные ра меры преобразователей изменяются (обратный пьезоэффект). В зависимости от знака разности потенциалов, приложенньХ к пьеаопреобразователям, последние испытывают деформацию сжатия или растяжения. Причем одновременно подаваемые напряжения на пьезопреобразователи, работающие на растяжение и сжатие, должны.быть обратной поля ности. Предположим, что вп-улка 4 (внутренняя) будет испытывать деформацию растяжения, втулка 3 (средняя) - сжатия и втулка 2 (наружная) - растяжения, тогда свободный конец с шайбой 10 получит перемещение в направлении центральной оси волновой передачи, равное сумме абсолютных линейных деформаций трех втулок 2, 3, 4. При последовательном переключении управляющего напряжения с одной на другую пару диаметрально противоположных пьезопреобразователей образуется волновая деформация гибкого элемента, приводящая к вращению жесткого элемента. Предложенная конструкция пьезопреобрааовйтелей, выполненных в виде концонтрично расположенных втулок, соединенных последовательно,торцам при, применении зубчатого зацепления в волновой передаче поаволяет суммировать их линейные перемещения (деформации), значительно сократить радиальные габариты, повысить выходной момент и обеспечить компактность устройства, а также создать модификацию устройства для получения поступа тельного движения. Управляющее напряжение пьезоэлектрических преобра зователей можно значительно снизить, если их выполнить наборными из кольцевых пластин с последующим склеиванием, а также за счет уменыления толщины пьезоэлектрических пластин. В этом случае для управления устройством необходимы источники питания с выходным напряжением порядка 10О-200 в. Последние могут быть легко реализованы на основе пьезоэлектрических трансформаторов, работающих на вы-сокоимпендансной нагрузке. Предлагаемое устройство выгодно отличается от .известного по компактности и выходному элементу, что существенно расширяет сферу его применения как силового привода с зубчатой передачей. Работоспособность волновых передач и пьезоэлементов при повышенных и криогенных (низких) температурах открывает возможность использования устройства в открытом космосе в качестве привода для поворота антенн на спутниках. Форм ул а изобретения Устройство для получения вращательного движения, содержащее волновую передачу с деформируемым элементом и электромеханический привод, образованный пьезоэлектрическими преобразователями, расположенными симметрично относительно оси передачи, опертыми одним концом в неподвижное основание, а другим - в деформируемый элемент, отличающееся тем, что, с целью уменьшения габаритов устройства в радиальном направлении, пьезоэлектрические преобразователи выполнены в виде концентрично расположенных, втулок, торцы которых последовательно жестко соединены. Источники информации, принятые во внимание при экспертизе: 1.Авторское свидетельство СССР № 485260, кл. F 16 Н 1/00, 1975. 2.Габов А. П. и др. Исследование щаговой волновой электромагнитной-передачи. Семинар Проектирование и технология изготовления деталей и механизмов в точном приборостроении, М., 1970. 3. Авторское свидетельство СССР № 441975, кл. В 06 В 1/06, 1972.