Механизмы, осуществляющие движение рабочего инструмента по заданной эвольвентной кривой профиля зуба шестерни, уже известны. Обычно в этих механизмах применяют специальные сменные копиры Б виде профильных кулачков или обкаточных дисков.
В предлагаемом механизме с целью обеспечения кинематической настройки движения по любой задаАой эвольвентной кривой без применения сменных копиров или обкаточных дисков шпиндель с укрепленным на нем инструментом установлен на каретке под углом к направлению ее прямолинейного движения, получаемого за счет упора ее щупа в линейку, укрепленную . на скалке, которая для сообщения ей движения сцеплена с диском, несущим зуб, на эвольвентную поверхность которого должен оказать воздействие инструмент.
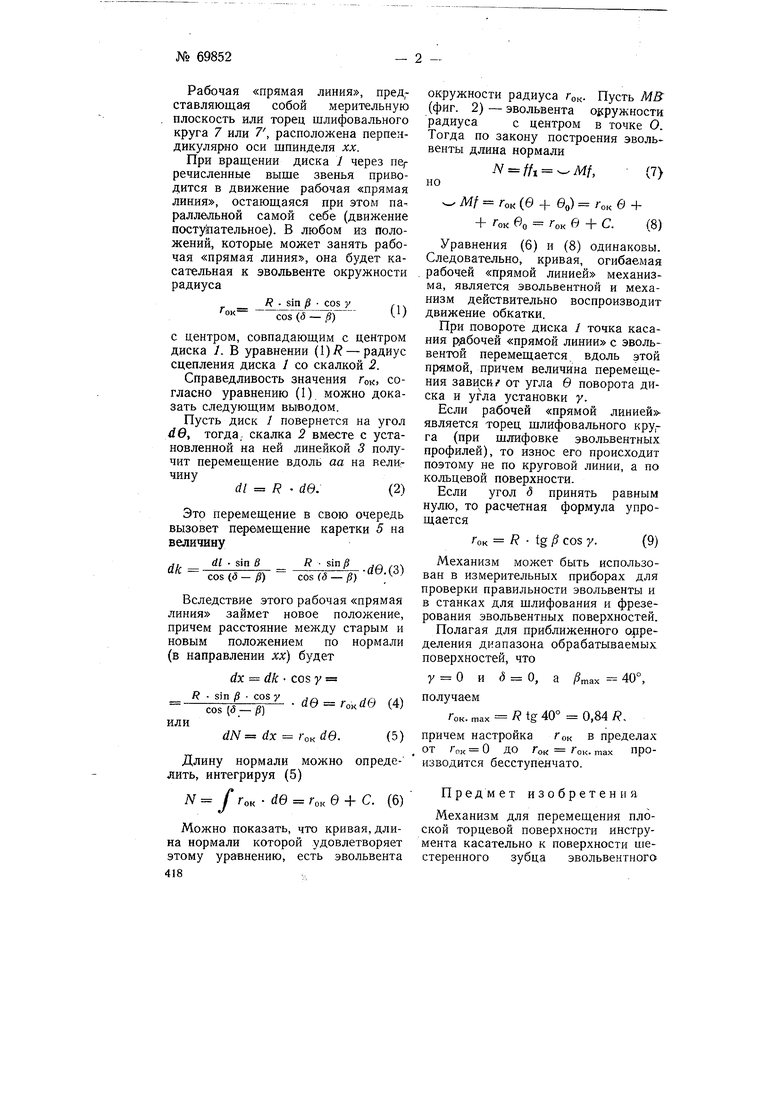
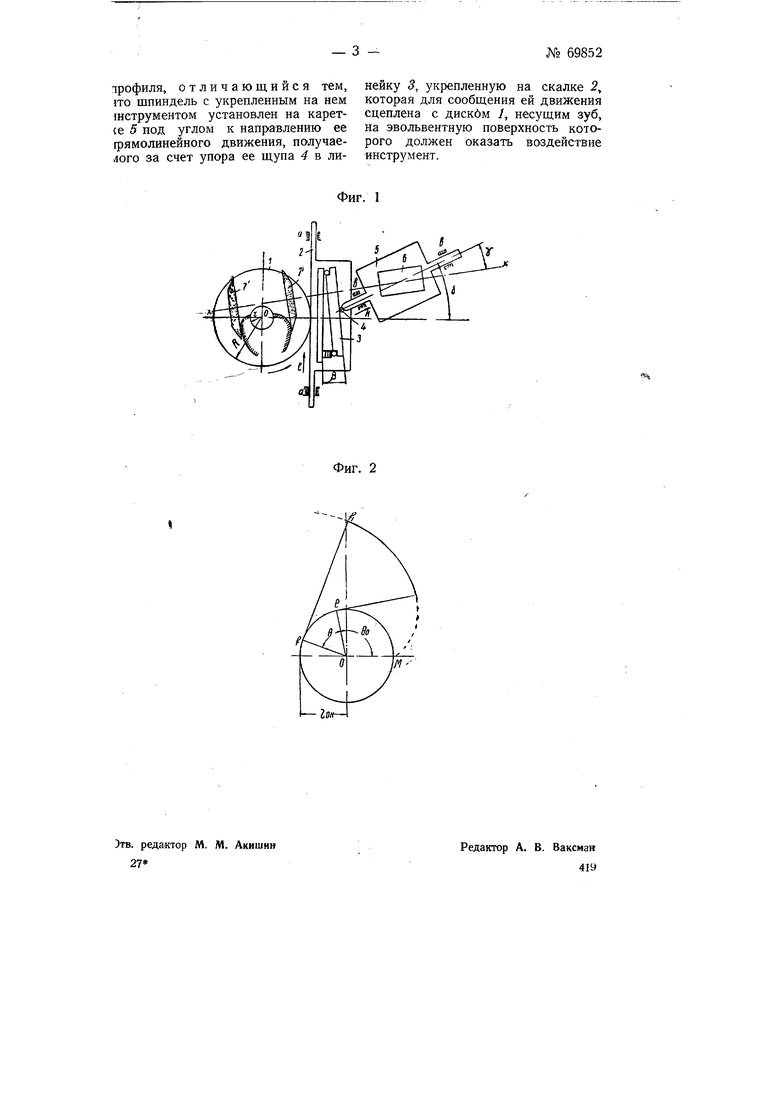
На фиг. 1 изображена кинематическая схема механизма, согласно изобретению, а на фиг. 2 - схема построения эвольвенты.
27 Свод в. 12.
Механизм представляет собой диск /, вращающийся вокруг оси (3, с которым постоянно соединена скалка 2, могущая перемещаться прямолинейно в направляющих аа; соединение диска / и скалки 2 происходит с помощью зубчатого зацепления или гибких лент так, что они катятся друг по другу без скольжения.
На скалке 2 помещена синусная линейка 5, которая может быть установлена помощью лимба или посредством концевых мер под заданным углом к направлению движения скалки 2. К линейке -5 постоянно прижат пружиной или грузом щуп 4 каретки 5, которая может перемеп аться прямолинейно в направляющих вв.
Направляющие ее могут быть установлены под заданным углом 90° - f относительно направляющих аа. На каретке 5 установлен рабочий шпиндель 6, ось которого XX может быть установлена под заданным углом относительно направляющих ев каретки.
417 Рабочая «прямая линия, пред,ставляющая собой мерительную плоскость или торец шлифовального круга 7 или 7, расположена перпендикулярно оси шпинделя хх. При вращении диска 1 через пег речисленные выше звенья приводится в движение рабочая «прямая линия, остающаяся при этом параллельной самой себе (движение поступательное). В любом из положений, которые может занять рабочая «прямая линия, она будет касательная к эвольвенте окружности радиуса - sin /8 cos у cos (5 - ,в) С центром, совпадающим с центром диска /. В уравнении (l)R - радиус сцепления диска / со скалкой 2. Справедливость значения Гок, согласно уравнению (1) можно доказать следующим выводом. Пусть диск / повернется на угол dQ, тогда, скалка 2 вместе с установленной на ней линейкой t получит перемещение вдоль аа на величинуdl R ив.(2) Это перемещение в свою очередь вызовет перемещение каретки 5 на величину dl sin бR sin COS («5 - jS) cos (ё - j8) Вследствие этого рабочая «прямая линия займет новое положение, причем расстояние между старым и новым положением по нормали (в направлении хх) будет dx dk CCS у R sin ft cosy,,.:).. .-ГА(A) cos(5-/J) - rfX Гок rf0.(5) Длину нормали можно определить, интегрируя (5) de roK0 + c. (б) Можно показать, что кривая, длина нормали которой удовлетворяет этому уравнению, есть эвольвента de.(3) окружности радиуса Гок- Пусть Л/Я (фиг. 2)-эвольвента О4сружностн радиуса с центром в точке О. Тогда по закону построения эвольвенты длина нормали ./У //, М/,(7) Mf Гок (в + во) Гок 0 + + /-ок во Гок е + с. (8) Уравнения (6) и (8) одинаковы. Следовательно, кривая, огибаемая рабочей «прямой линией механизма, является эвольвентной и механизм действительно воспроизводит движение обкатки. При повороте диска / точка касания рабочей «прямой линии с эвольвентой перемещается, вдоль этой прямой, причем величина перемещения зависи/ от угла В поворота диска и угла установки у. Если рабочей «прямой линией является торец шлифовального круга (при шлифовке эвольвентных профилей), то износ его происходит поэтому не по круговой линии, а по кольцевой поверхности. Если угол б принять равным нулю, то расчетная формула упрощаетсяГок / tg уЗ cos у. Механизм может быть использован в измерительных приборах для проверки правильности эвольвенты и в станках для шлифования и фрезерования эвольвентных поверхностей. Полагая для приближенного о ределения диапазона обрабатываемых поверхностей, что у О и (5 0, а шах 40°, получаем roK.niax / tg40° 0,84/, причем настройка Гок в пределах от /ок 0 до Гок ок. max ПрОизводится бесступенчато. Предмет изобретения Механизм для перемещения плоской торцевой поверхности инструмента касательно к поверхности шестеренного зубца эвольвентного
лрофиля, отличающийся тем, 1ТО шпиндель с укрепленным на нем 1нструментом установлен на каретсе 5 под углом к направлению ее фямолинейного движения, получаелого за счет упора ее щупа 4 в линейку 3, укрепленную на скалке 2, которая для сообщения ей движения сцеплена с дискбм /, несущим зуб, на эвольвентную поверхность которого должен оказать воздействие инструмент.
--5%
Фиг, 2
