(54) СИСТЕМА УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для визуализации рабочей зоны робота | 1979 |
|
SU855608A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО НАВЕДЕНИЯ ТЕЛЕКАМЕРЫ | 2014 |
|
RU2556441C1 |
| МОБИЛЬНЫЙ РОБОТОТЕХНИЧЕСКИЙ КОМПЛЕКС | 2003 |
|
RU2241594C1 |
| Многофункциональный активный протез руки | 1980 |
|
SU973121A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |
| ПРОТЕЗ ПРЕДПЛЕЧЬЯ НА РАСЩЕПЛЕННУЮ КУЛЬТЮ | 1993 |
|
RU2067852C1 |
| УСТРОЙСТВО ДЛЯ ПРОГРАММНОГО УПРАВЛЕНИЯ МАНИПУЛЯТОРОМ С ШЕСТЬЮ СТЕПЕНЯМИ ПОДВИЖНОСТИ И ЛИНЕЙНО ПЕРЕМЕЩАЕМЫМ В ГОРИЗОНТАЛЬНОЙ ПЛОСКОСТИ ОСНОВАНИЕМ | 2022 |
|
RU2794082C1 |
| Устройство для управления манипулятором | 1984 |
|
SU1229728A1 |
| Исполнительный орган манипулятора | 1991 |
|
SU1779587A1 |
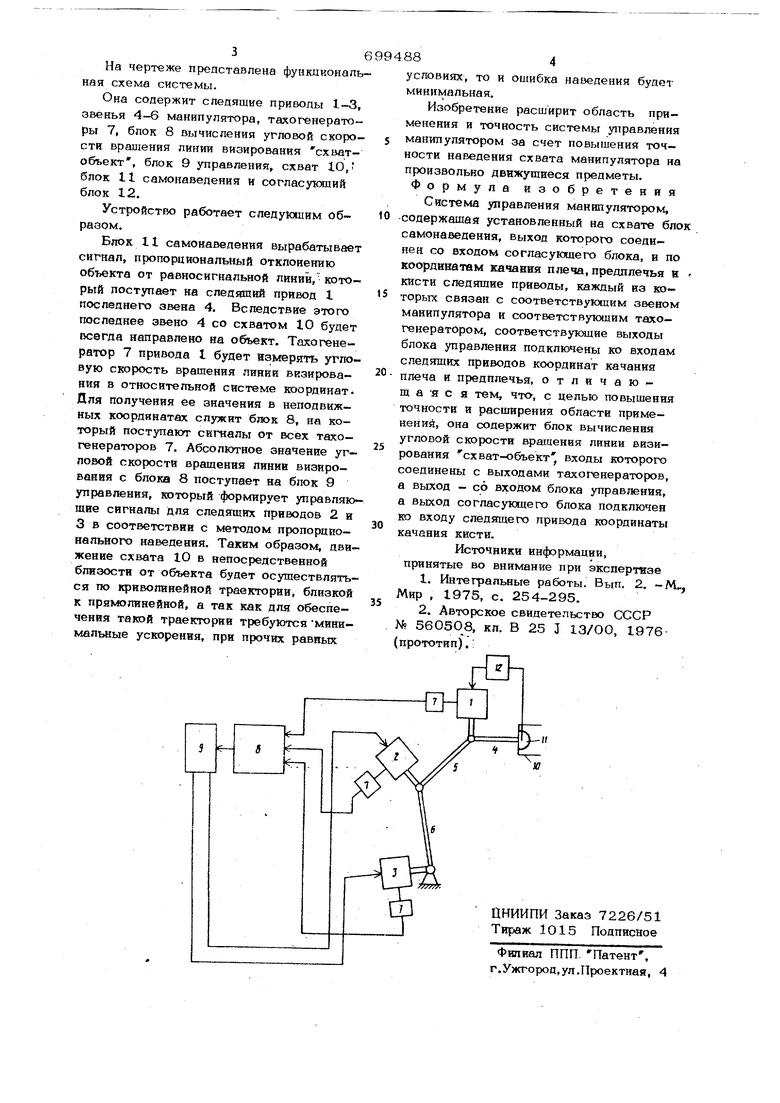
Изобретение относится к робототехнике и может быть использовано при соз дании систем управления манипуляторами, работающих с подвижными объектами Известна система управления манипуляторами, содержащая для повышения точности наведения схвата на произвольно движущиеся предметы телевизионную уставовку и вычислительный бпок, имеющаяся в своем контуре ЦВМ, н которая может наводитьс я, только на медленно движу щиеся предметы, положение которых существенно не изменяется за время обработки зрительной информации ll. Наиболее близким техническим рещением к изобретению является система, содержашая установленный на схвате блок самонаведевия, выход которого соединен с входом согласуюа1его блока, и по координатам качания плеча, предплечья и кис ти следящие пряводы, каждый из которых связан с соответствующим звеном манипулятора и соответствующим тахо- генератором, соответствующие выходы едока управления подключены JOT входам следящих приводов координат качания плеча и предплечья. При работе такой системы управления возникают большие ошибки при наведении схвата на произвольно движущиеся объекты. Это происходит из-за того, что при формировании вектора скорости схвата, т.е. скорости с которой схват подходит к объекту, не учитывается информация о движении обьёктаСЙЗ, Целью изобретения является повышение точности и расширения области применения CHCi Mbl. Для этого известная система содержит блок вычисления угловой скорости вращения линии визирования схват- объект , входы которого соединены с выходами тахогенераторов, а выход со входом блока управления, а выход согласукшего блока подключен ко входу следящего привода координаты качания кисти.
