Изобретение может быть использовано в измерительной технике, в элек ронных микроскопах, в лазерной технике и т.д. Известен механизм для прямолинейного перемещения детали при нанесении покрытий в вакууме, где каретка соединяет средние части нескольких упругих опор, своими конца ш жестко закрепленных в корпусе. Через упругие опоры пропускается электрический ток, вследствие чего последние нагреваются , испытывают температурное . удлинение и преобразуют последнее в увеличенную стрелу прогиба средней части. При охлаждении движение проис ходит с обратным знаком 1. Недостатком известного устройства является значительная инерционность действия, так как процесс охлаждения в вакууме вследствие отсутствия кон векции идет очень медленно. Принудительное охлаждение, например, с помощью воды вызывает усложнение конст рукции, так как требует наличия вводов в вакуум хлад-агентов, что не позволяет использовать преимущества известных устройств ( а именно: исключение необходимости передачи дви:жения через стенку вакуумной камеры и, следовательно, различного рода герметизирующих элементов типа сильфоков, резиновых манжет и т.д.) полностью. Малое быстродействие ( не менее 5-7 с при наличии принудительного охлаждения опор) не позволяет подключить такие устройства к автоматической системе управления перемещением рабочих объектов, Из известных технических решений наиболее близким по технической cyiaности к предлагаемому является манипулятор, содержащий корпус, пьезопреобразовгтели с закрепленными в них-гибкими элементами, например, в виде плоских ленточных пружин и подложкодержатель 2. Недостатком известной конструкции является низкая точность перемещения по,цложкодержателя. Цель изобретения - повышение точности перемещения. Это достигается тем, что в манипуляторе, содержащем корпус, пьезопреобразователи с закрепленными в них гибкими элементами, например, в виде плоских ленточных пружин и подложкодержатель,. пьезопреобразователи ;неподвижно закреплены на корпусе, а
гибкие элементы жестко соединены с подложкодержателем,
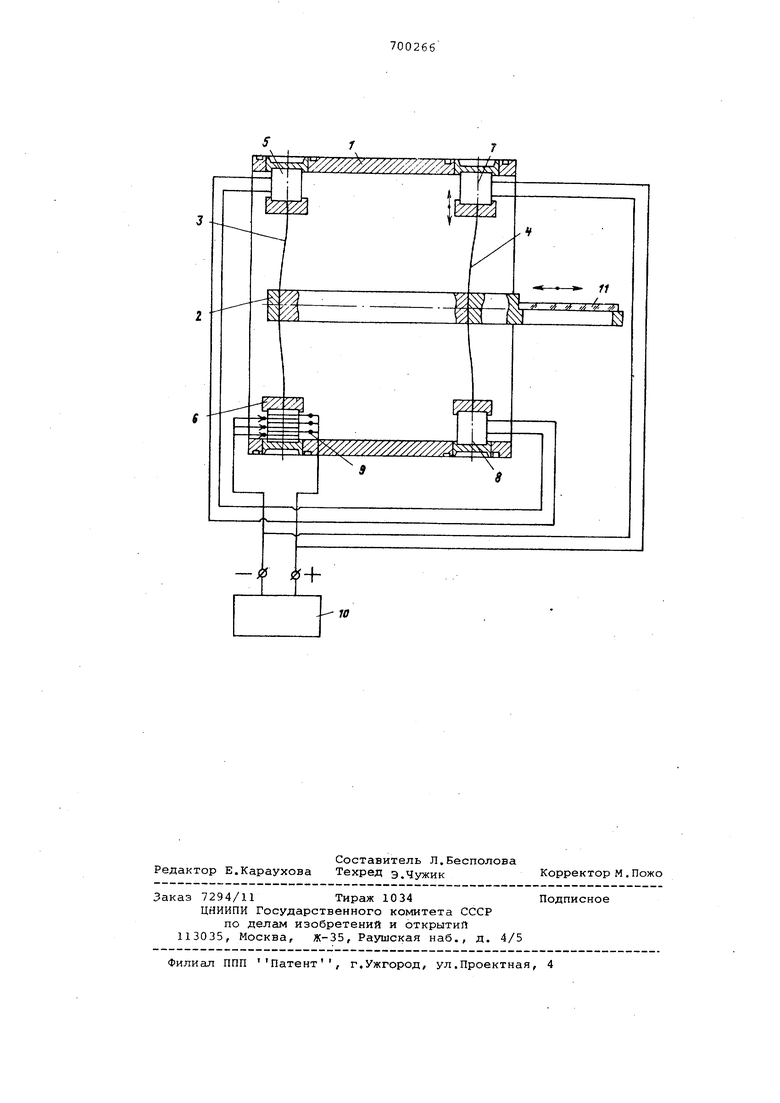
Па чертеже схе1матически показан пре,цлагаемьтй манипулятор«
Манипулятор состоит из корпуса 1. внутри которого располохкен по,цложко-даржатеЛь 2 на опорах, выполненных в }зиде плоских ленточных пружин 3 к 4, связанных меж,цу собой в средних частях посредством подложкодержателя 2 f а своими концами жестко соединенных с пьезопреобразователями 5 6 и 7, 8 соответственноf которые в свою очередь жестко, например, при помощи сварки закреплены гз корпусе Пьезфпреобразователи выполнены в,виде единичных пьезоэлемектов (таблеток), с слеенных или сваренных между собой через промежуточные лепестки 9, которые по группам соединены с соотЕвтствующими полюсами источника питания 10е На стержне расположена обрабатываемая деталь 11, Упругих опор может быть и более двух, при этом расположение их может быть осуществлено Е; одной плоскости относительно подложкодержателя через равные угловые промежутки,, Для обеспечения однозначности хода упругие опоры при c6opi :e нагружаются до предела потери устойчивости и принимают форму полуволны синусоиды с одинаковым направление .м прогиба средней части.
Манипулятор работает следующим образом.
При одновременной подаче напряясеВИЯ прямой полярностр на пьезопреобразователи, состоящие из одинакового количества пьезотаблеток, последние Б силу обратного пьезоэффект ((Юпытывают в электрическом поле расГяжениер увеличиваются в продольном (осевом) направлении и дeфop tиpyю:: упругие опоры, сжимая их продольно, от чего последние в силу свойства умножения увеличивают малые продольные деформации и увеличенные в -i раз поперечные перемещения, т„е« движение подложкодержателя осуществляется по чертежу влево. При уменьшении подаваемого напряжения до нуля пьезопреобразователи принимают исходнут э длину, а затем при перемене знака подаваемого напряжения они испытывают сжатие и под.ложкодержатель перемещается вправо (см„ чертенс) ,
Например f при числе таблеток 215 в каходом пьезопреобразователе (магериал ЦТС-1Э), величине подаваемого напряжения ±400 В каждый пьезостолбец обеспечивает продольную деформацию опоры в 12 мк (i6 мк) Следовательно р суммарная гфодольная деформация каждой из опор равна 24 мк,
При оптимальной величине продольной деформации передаточное отношение каждой опоры равно i 20, таким образом, ход стержня равен
д л
-i-24 ллК20;46Ол к«о,5м.м..
C IVvWv
Ка-ждой величине напряжения соответствует определенное перемещение подложкодержателя 2,
Учитывая то, что можно обеспечить малые величины напряжения, подаваемого на пьезопреобразователи, возможно в пределах указанного выше хода получать перемещения подложкодержателя, начиная с десятых и даже сотых долей мкf и, таким образом, получить весьма точные и плавные перемещения обрабатываемой детали.
Обладая чрезвычайно малой инерционностью, пьезопреобразователи с высокой частотой способны отрабатывать управляющий сигнал с источника питания 10f так как максимальная частота обработки механизма определяется резонансной частотой упругих опор при поперечных колебаниях массы подложкодержателя. При соответствующей жесткости упругих опор величина этой частоты может достигать сотен герц и более .
Таким образом, манипулятор с такими параметрами по быстродействию может быть исгюльзсзван в системах с автоматическим управлением перемещением объектов в вакууме.
Высокая точность перемещения подложкодержателя обеспечивается отсутствием в цепи кинематических пар с внешним трением, отсутствием люфтов и износа « Отсутствие необходимости -применения для работы различного рода смазок делает предлагаемый манипулятор предпочтительным д;ая использования в вакууме.
Формула изобретения
Манипулятор, содержащий корпус, пьезопреобразователи с закрепленными в них гибкими элементс1ми, например, виде плоских ленточных пружин и подложке/держатель, отличающиЯс я тем, что, с целью повышения точности перемещений, пьезопреобразователи неподвижно закреплены на корпусе, а гибкие элементы жестко соединены с подложкодержателем.
Источники информации, принятые во внимание при экспертизе
1„ Авторское свидетельство СССР № 337448, кл. С 23 С 13/08, 1972.
2, Патент ГДР № 108172, кл. С 23 С 13/00, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата и юстировки детали | 1977 |
|
SU744775A1 |
| Устройство для получения вращательного движения Абрамова Валентина Алексеевича (Абрамова В.А.) | 2016 |
|
RU2654690C9 |
| Двигатель | 1979 |
|
SU848736A1 |
| ВЫСОКОВОЛЬТНЫЙ ВАКУУМНЫЙ ПЕРЕКЛЮЧАТЕЛЬ | 2006 |
|
RU2314588C1 |
| УСТРОЙСТВО ДЛЯ ПОЛУЧЕНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ АБРАМОВА В. А. | 2016 |
|
RU2686648C9 |
| Установка для микросварки | 1976 |
|
SU610641A1 |
| Печь для термообработки деталей | 1977 |
|
SU654842A1 |
| Волновой электродвигатель Абрамова В.А. | 2016 |
|
RU2667214C1 |
| МНОГОКООРДИНАТНЫЙ ПЬЕЗОДВИГАТЕЛЬ | 1999 |
|
RU2166832C1 |
| ДАТЧИК ДАВЛЕНИЯ С ЧАСТОТНЫМ ВЫХОДОМ | 1999 |
|
RU2193172C2 |