1
Изобретение Относится к, измерительной технике и предназначено для измерения параметров магнитного поля,
Известно устройство для. измерения napeuvieTpoB магнитного поля, содержа- щее три взаимно ортогональных стержневых феррозонда 1.
Недостатком известного устройства является низкая точность измерения, обусловленная тем, что стержневые феррозонды обладают высоким уровнем магнитных шумов и высоким дрейфом нуля,
Наиболее близок к изобретению ферроэондовый блок, состоящий из трех взаимно ортогонально расположенных кольцевых феррозондов 2, Феррозонды находятся на расстоянии друг от друга. Каждый феррозонд содержит измерительную и компенсационную катушки,
Недостаток известного устройства, состоит в низкой точности измерения, обусловленной влиянием поперечных составляющих магнитной индукции на каждый кольцевой феррозонд. Под действием поперечных составляющих в сердечни ах феррозондов возникают ложные
вторые армоники индукции частоты поля возбуждения, которые проникают, визмерительные катушки. Кроме того, так как практически невозможно изготовить феррозонд, чтобы ось его измерительной катушки была точно перпендикулярна к поперечной составляющей, то последняя наводит ложный сигнал, так же как и измеряемая составляющая вектора индукции магнитного поля.
С целью повышения точности измерения в трехкомпонентном феррозондовом блоке, содержащем три ортогонально расположенных кольцевых феррозонда, каждый из которых имеет обмотку возбуждения и расположенные соосно измерительную и компенсационную обмотки, каждый феррозонд снабжен дополнительной обмоткой, ось которой перпендикулярна к оси измерительной обмотки. При этом дополнительная обмотка первого феррозонда соединена последовательно с компенсационной об моткой второго феррозонда, дополнительная обмотка второго феррозонда последовательно с компенсационной обмоткой первого феррозонда, а дополнительная обмотка третьего феррозонда - последовательно с ксмпенсационной обмоткой феррозонда, ось которой параллельна оси дополнительной обмотки третьего феррозонда,
Такая конструкция трехкомпонентного феррозондового блока позволяет исключить влияние поперечных составляющих вектора магнитной индукции на каждый феррозонд, тем самым повь1сить точность измерения параметров магнитного поля.
На черте}ке изображено данное устройство.
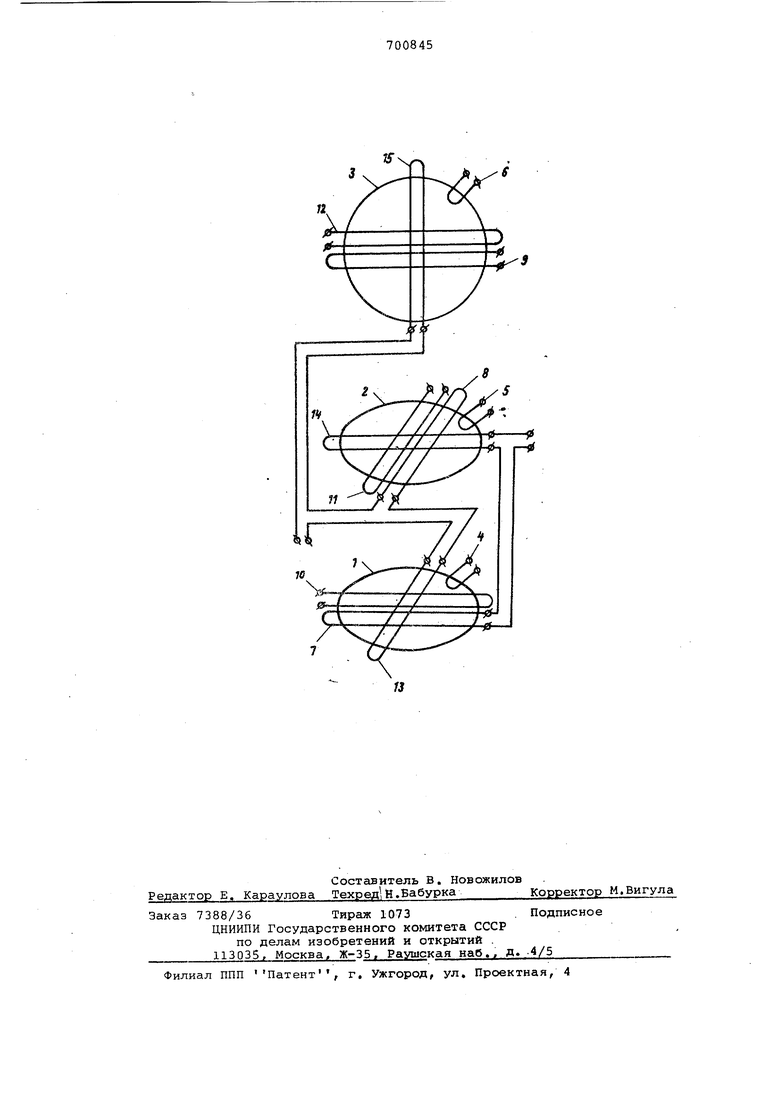
Устройство состоит из ортогонально расположенных кольцевых феррозондов 1,2,3, каждый из которых содержит обмотку 4, 5, 6 возбуждения ирасположенные соосно компенсационную 7,8, 9 и измерительную 10, II, 12 обмотки. Кроме того каждый феррозонд снабжен дополнительной обмоткой 13,. .14, 15, ось которой перпендикулярна к оси измерительной обмотки 10, 11, 12, При этом дополнительная обмотка 13 первого феррозонда 1 соединена последовательно с компенсационной обмоткой .8 второго феррозонда. 2, дополнительная обмотка 14 второго феррозонда - последовательно с компенсационной обмоткой 7 первого феррозонда, а дополнительная обмотка 15 третьего феррозднда 3 - последовательно с компенсационной обмоткой феррозонда 2, ось которой параллельна оси дополнительной обмотки 15 третьего феррозонда 3,
Предлагаемое устройство работает следующим образом,
Трегхкомпонентный феррозондовый блок, состоящий из ортогонэ.льно расположенных кольцевых феррозондов 1/ 2, 3, помещается в магнитное поле, составляющие вектора магнитной индукции которого необходимо измерить. Далее в обмотки 4, 5, 6 возбуждения, подается переменЕШй ток возбуждения. Под действием составляющих вектора магнитной индукции в феррозонда.х 1, 2, 3 возникают вторые гармоники индукции частоты поля возбуждения, которые индуцируют в измерительных обмотках 10, 11, 12 ЭДС вторых гармоник, амплитуды которых пропорциональны величинам соответствующих составляющих. Далее сигналы с каждого- фер- розонда усиливаются, детектируются и ггодаются соответственно в цепи обмоток 7,8,9 для компенсации соответствующих измеряемых составляющих вектора магнитной индукции (так как в феррозондах, главным образом, используется нулевой метод измерения, как наиболее точный), Кроме того, с компенсационной обмотки 7 феррозонда 1 подается сигнал в дополнительную обмотку 14 феррозонда 2 для компенсации поперечной составляющей вектора магнитной индукции, действующей на феррозонд 2. Сигнал с компенсационно обмотки 8 феррозонда 2 поступает в дополнительную обмотку 13 феррозонда 1 для компенсации поперечной составляющей, действующей на феррозонд 1, Сигнал с компенсационной обмотки 8 феррозонда 2 подается в дополнительную обмотку 15 феррозонда 3 для компенсации поперечной составляющей вектора магнитной индукции, действующей на феррозЪнд 3,, Затем полезные сигналы о составляющих вектора магнитной индукции в цепях компенсационных обмоток 7, 8, 9 измеряются с помощью трех измерительных приборов. Формула изобретения
Трехкомпонентный феррозондовый блок, содержащий три ортогонально расположенных кольцевых феррозонда, кажЕ(ый из которых содержит обмотку возбуждения и расположенные соосно измерительную и компенсационную обмотки, отличающийся тем, что, с целью повышения точности измерения каждый феррозонд снабжен дополнительной обмоткой, ось которой перпендикулярна к оси измерительной обмотки, яри этом дополнительная обмотка первого феррозонда соединена последовательно с компенсационной обмоткой второго феррозондар дополнительная обмотка второго феррозонда соединена последовательно с компенсационной обмоткой первого феррозонда, дополнительная обмотка третьего феррозонда соединена последовательно с компенсационной обмоткой .феррозонда,- ось которой параллельна оси дополнительной обмотки третьего феррозонда.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 312216, кл, G01R 33/02, 1971,
2.Р.1Эиае,С.а.Согаоп Ьипа1- Surface Nvag-netometers OEtE Trans.on WNCtgri v-MAQ-, № 3, 1973:: PP. 226-231.
П
w
/
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ ТРЁХКОМПОНЕНТНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2020 |
|
RU2730097C1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2007 |
|
RU2352954C2 |
| ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР И СПОСОБ ИЗМЕРЕНИЯ КОМПОНЕНТ ИНДУКЦИИ МАГНИТНОГО ПОЛЯ ПРИ ПОМОЩИ ВЕКТОРНОЙ КОМПЕНСАЦИИ | 2013 |
|
RU2539726C1 |
| Трехкомпонентный феррозонд | 1977 |
|
SU789929A1 |
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| Трехкомпонентный феррозонд | 1978 |
|
SU731404A1 |
| Малогабаритный трехкомпонентный феррозонд | 1981 |
|
SU953604A1 |
| СПОСОБ МИНИМИЗАЦИИ ПОГРЕШНОСТЕЙ В ДИФФЕРЕНЦИАЛЬНОМ МАГНИТОМЕТРЕ | 2003 |
|
RU2257593C2 |
| МОНОБЛОЧНЫЙ ФЕРРОЗОНДОВЫЙ МАГНИТОМЕТР | 2008 |
|
RU2382376C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПОЛНОГО ВЕКТОРА МАГНИТНОГО ПОЛЯ, А ТАКЖЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2218577C2 |