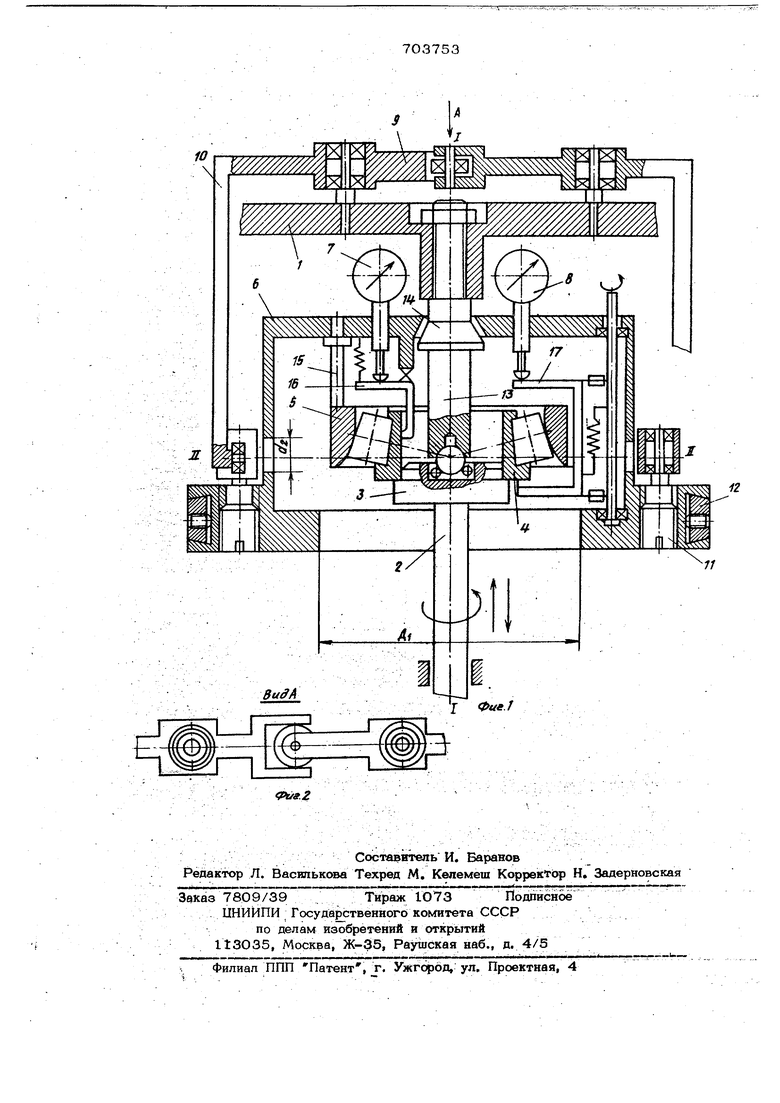
: ,: . I. Изобретение относится к области общего машиностроения и может быть йспользовайо преимущественно в пЬдшип1виковой промьпиленности. Известен прибор для контроля биений подшипников качения, содержащий соосно смонтированные в корпусе шпиндель с опорой доя установки внутреннего кольца контролируемого подшипника, воздействующий на наружное кольцо контролируемого подшипника груз с индикатс ами и муфту ll. Однако известный прибор це обеспечи ваёт точности контроля наличия опрокидывающего момента груза. Целью изобретения является повышение товдости контроля за счет совмещения центра масс груза с центром псворота наружного кольца испытьгааемого подшипника. Поставленная цель достигается за сче того, что в предлагаемом устройстве гру выполнен чашеобразным, а муфта - в виде охватывающих груз Г-образных кронштейнов, шарнирно связанных с корпусом. Груз снабжен балансировочными винтами, расположенными по . На фиг. 1 показано общий вид предлагаемое устройство, на фиг. 2 - вид по стрелке А на фиг. 1. В корпусе 1 соосно смонтированы шпиндель 2 с опекой 3 для установки внутреннего кольца 4 контролируемого подшипника, воздействукхций на наружное кольцо 5 контролируемого подшипника, груз 6 с индикаторами 7 и 8 для контроля радиального и осевого биения и муфта 9. Груз 6 выполнен чашеобразным, а муфта 9 - в виде охватьтвакших груз 6 Г-образных кронштейнов Ю, связанных шарнирно с корпусом 1. Груз 6 снабжен балансировочными винтами 11, 12, расположенными пбёгб toptty, Я содержит стержни для передачи возоействия от груза 6 на наружное кольцо 5 контролируемого подшипника. Воздействие кронштейнов 1О муфты 9 с грузом 6 осушестБяется в плоскости. проходящей через мгновенный центр пово рота {точка О) наружного кольца 5 конfponHpyeMoro подшипника, установленного на опору 3 сЖмоустанавливакшёгося шпин деля 2, перпендикулярного его оси. 6 устройства, выполненный чашеобразным размещен полностью вниз так, что его центр тяжести масс совпадает с мгновенрым центром поворота (точка О) наружного кольца 5 подшипника. Для возможности тонкой регулировки ПолЬжёния цен тра тязкести масс груза 6 в радиальном направлении служат балансировочные винты 11, 12, расположенные в йольцевЬЙ проточке на торце груза 6. Контролируемый подшипмт к устанавливают на опору 3 самоустанавливающегрСЯ шпинделя 2, верхний упор 13 которо го закреплен на корпусе 1. На упоре 13 выпопнен конусный поясок 14. Предлагаемое устройство работает следующим обраэом.,,„ В начальный момент шпинх1ель 2 йаАодится в нижнем положении. Груз 6 висит на конусном поясе 14, при. этом он точио центрируется. Контролируе ъ ый пощинпник устанавливается шнрбким тбрцом внутре11него кольца 4 на Ъпору 3. Затем проис дит подъе шпинделя 2 до соприкоснсжения его с упором 13. В процессе подъема шпинделя груз 6 снимается с конусного пояска 14 и посредством трех стержней 15 yctanaB ливается на наружной кольцо 5 подШипника. Рычаг 16 и скоба 17 занимают рабочее положение. Контроль ёиений пройсходит при вращении шпинделя 2, отсчет - по шкапам иЬдакаторов 7, 8. Груз 6 предохрайяетСя от Йоворота муфтой, состоящей из Г-образных кронштейнов 1О, шарнирно укрёШ1енн1ьпс ha корпусе , , Конструкция муфты позволяет грузу 6 свободно совершать радиальные и осевые Перемещения и не создает опрокидывающего мрмейта. Балансировка груза производится относительно двух взанмоперпендикулярных осей 1-1 и И - И (фиг. 1). Эти оси пересекаются в точке О, координаты которой находятся расчетным путем для каждого типа контролируемого подшипника. БалансирОбку груза производят в сборе со всеми элементами, которые конструктивно крепятся на нем. В начале груз центрируют на оправке с помошью отверстий Д и с( и балансируют его, перемещая в кольцевой проточке винтами 12. Затем груз устанавливают на оправку с помощью Двух отверстий d и балансируют его перемещением винтов 11. В обоих Случйях Ьп;равки с грузом устанавливается на ножевые опоры, . 6 р мул а И 3 об р е. т е и и я Устройство для контроля биений подшипников качения, содержащее соосно смрнтированйые в корпусе, шпиндель с опорой для установки внутреннего кольца контролируемого подшипника, воздействующий на наружное кольцо контролируемого подшипника груз с индикаторами и муфту, о т л и ч а ю щ е е с я тем, что, с целью повышения точности контроля за . счет совмещения центра масс груза с центром поворота наружного кольца испытываемого подшипника, груз выполнен чашеОбразныМ| а муфта - в виде охватывающих груз Г-образных кронштейнов, шарнврнр связанных с корпусом. 2. Устройство по п. 1, 6 т л и ч а ющ 6 е с я feM, что груз снабжен баяансировочн&Пмгв винтами, расположенными по . ет тар-ау. . /Источники информации принятые во внимание при экспертизе I. Авторское свидетельство СССР № 1963S2, кл. G-01 В 3/22, 1967.

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения качества подшипников | 1988 |
|
SU1709189A1 |
| ПОЛУАВТОМАТ ДЛЯ МНОГОМЕРНОГО КОНТРОЛЯ ПОДШИПНИКОВ | 1990 |
|
RU2089846C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ТОЧНОСТИ ВРАЩЕНИЯ ДВУХРЯДНОГО РОЛИКОПОДШИПНИКА ПРИ ИМИТАЦИИ РАБОЧЕГО НАТЯГА | 2010 |
|
RU2451275C1 |
| УСТРОЙСТВО ДЛЯ БАЛАНСИРОВКИ ОБЪЕКТА | 1999 |
|
RU2147733C1 |
| Стенд для статической балансировки гребных винтов | 1973 |
|
SU540181A1 |
| ШПИНДЕЛЬ С ЗАЖИМНЫМ ЦЕНТРИРУЮЩИМ ПАТРОНОМ | 2009 |
|
RU2400331C1 |
| Устройство для контроля подшипников качения | 1990 |
|
SU1751654A1 |
| СТАНОК ДЛЯ ШЛИФОВАНИЯ КАНАВОК ДЛЯВВОДА ШАРИКОВ В КОЛЬЦАХ ШАРИКОВЫХПОДШИПНИКОВ12 | 1971 |
|
SU428925A1 |
| СПОСОБ СБОРКИ И ОБКАТКИ ПОДШИПНИКОВОГО ПОГОНА И СТЕНД ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2249192C2 |
| СПОСОБ ИЗМЕРЕНИЯ ГЕОМЕТРИЧЕСКОЙ ФОРМЫ НОМИНАЛЬНО КРУГЛОЙ ЦИЛИНДРИЧЕСКОЙ ДЕТАЛИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2158895C1 |