(5) БЕСКОНТАКТНЫЙ СЛЕДЯЩИЙ ПРИВОД ПОСТОЯННОГО ТОКА
| название | год | авторы | номер документа |
|---|---|---|---|
| Бесконтактный следящий привод постоянного тока,оптимальной по быстродействию | 1973 |
|
SU459761A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Следящая система | 1975 |
|
SU608119A1 |
| Следящая система | 1979 |
|
SU847275A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
1
Изобретение относится к автоматике, и может быть использовано при создании следящих приводов постоянного тока, оптимальных по быстродействию.
Известны бесконтактные следящие приводы постоянного, тока, содержащие сумматоры, нелинейные блоки, управляемый ключ, двигатель, редуктор, тахогенератор и выпрямитель СО.
Однако этот привод сложный из-за необходимости измерения первой и второй производных сигнала ошибки системы, а также реализации трех нелинейных блоков.
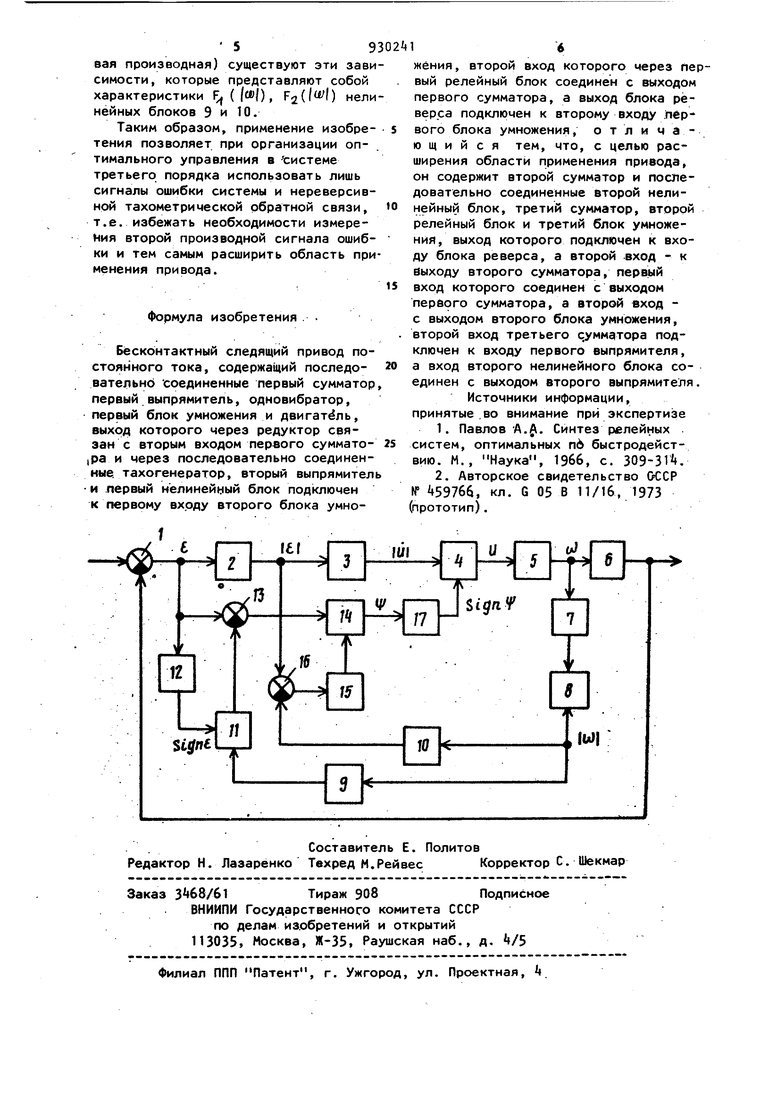
Наиболее близким по технической .сущности к изобретению является привод , содержащий. последовательно соединенные первый сумматор, первый выпрямитель, одновибратор, первый блок умножения и двигатель, выход которого через редуктор связан с вторым входом первого сумматора и через последовательно соединенные тахогенератор, второй выпрямитель и первый
нелинейный блок подключен к первому входу второго блока умножения, второй вход которого через первый релейный блок соединен с выходом первого сумматора, а выход блока реверса подключен к второму входу первого . блока умножения 2 J.
Алгоритм управления, использованный в этом приводе, справедлив для маломощных двигателей, передаточная функций которых представлена интегрирующим и инерционным звеньями, а для организации оптимального управления требуется лишь одно переключение управляемого напряжения. С увеличением мощности, двигателя уменьшается соотношение между электромагнитной и электромеханической постоянными времени двигателя, передаточная функция двигателя в этом случае представлена интегрирующим и двумя инерцион ными звеньями, а .для организации оптимального управления необходимо осуществить два переключения управ 39 ляющего напряжения, что невозможно в известном приводе. Цель изобретения - расширение области применения привода. Цель достигается тем, что привод содержит второй сумматор и последовательно соединенные второй нелинейный блок, третий сумматор, второй релейный бдок и третий блок умножения, выход которого подключен к входу блокареверса, а второй вход - к выходу второго сумматора, первый вход которого соединен с выходом первого сумматора, а второй вход с выходом второго блока умножения, второй вход третьего сумматора подключен к входу первого выпрямителя, а вход второго нелинейного блока соединен с выходом второго выпрямителя . На чертеже представлена функциональная схема следящего привода постоянного тока.. Привод содержит первый сумматор 1 первый выпрямитель 2, одновибратор 3 первый блокумножения 4, двигатель 5 редуктор 6, синхройный тахогенератор 7, второй выпрямитель 8, первый и второй нелинейные блоки 9 .и 10 .соответственно, второй блок умножения 11, первыЦ релейный блок 12, второй сумматор 13, третий блок умножения Н, второй релейный блок 15, третий сумматор 16, .блок реверса 17. Причем на чертеже обозначены сигнал € ошибки, модуль /сигнала ошибки, частота Ф вращения двигателя, модуль(часготы вращения двигателя выходной сигнал Ff( СУ ) первого нелинейного блoka 9, выходной сигнал р2( /(/) второго нелинейного блока Ю переключающая функция Ч , знак переключающей функции, управляющее напряжение U, моду;1ь|0/управляющего напряжения. Бесконтактный следящий привод по стоянного тока работает следующим об разом. В начальный момент времени сигнал , определяемый зкаком. входного воздействия или сигналом ошибки €, с выхода первого сумматора 1 переда ется на вход блока реверса 17 через второй сумматор 13 и третий блок I умножения без изменения знака, так как сигналы нелинейной тахометричёской обратной связи с синхронного тахогенератора 7, входного выпрямителя 8, первого и второго нелиней4ных блоков 9 и 10 отсутствуют, и, следовательно, отсутствует сигнал на выходе второго блока умножения 11, а состояние второго релейного блока 15 определяете модулем сигнала ошибки, т.е. + 1. Поэтому в первом блоке умножения k модулю управляющего напряжения присваивается знак Е- сигнала ошибки. Первое изменение знака переключающей. фунИции и управляющего напряжения U определяется моментом смены знака на выходе второго сумматора 13, осуществляющимся при выполнении равенства « F (/И/), где. , iV - величины сигнала ошибки и частоты вращения в момент первого переключения управляющего напряжения. При этом меняется знак на выходе третьего блока умножения 14 и, соответственно, на выходе блока реверсу 17. Второе переключение управляющего напряжения U происходит при выполнении соотношения F2.( |Ц./),где 6а д.- сигнала ошибки и частоты вращения в момент второго переключения управляющего напряжения, и смене знака на выходе третьего сумматора 16, в результате чего состояние второго релейного блока 15 меняется на противоположное, и происходит смена знака на выходе третьего блока умножения l4 и блока реверса 17. Таким образом, привод реализует следующий алгоритм управления f-U-F iCjoyDsrgnfcn-SJgnEltj-FaddJSf). позваляющий-организовать переключения полярности управляющего напряжения с использованием информации о сигнале ошибки и ее первой производной, величина которой при ступенчатом входном воздействии пропорциональ-. на частоте вращения двигателя. Возможность такой реализации базируется на особенностях гиперплоскости .переключения в случае . стационарного фазового пространства и нулевых начальных условиях при отработке ступенчатых входных воздействий. В :этом случае проекциипересечения поверхностей, образованных оптимальными фазовыми траекториями, на координатные плоскости фазового пространства представляют собой линии. Для каждого момента переключения между двумя фазовыми координатами вектора ошибки (в изобретении эта ошибка системы и ее первая производная) существуют эти зави симости, которые представляют собой характеристики I;, ( И), f() нели нейных блоков 9 и 10. Таким образом, применение изобретения позволяет при организации оптимального управления в Системе третьего порядка использовать лишь сигналы ошибки системы и нереверсивной тахометрической обратной связи, т.е. избежать необходимости измерения второй производной сигнала ошибки и тем самым расширить область при менения привода. Формула изобретения . . Бесконтактный следящий привод постоянного тока, содержащий последовательно соединенные первый сумматор первый выпрямитель, одновибратор, первый блок умножения и двигатель, выход которого через редуктор связан с вторым входом первого суммато,ра и через последовательно соединенные, тахогенератор, вторый выпрямител и .первый нелинейный блок подключен к первому входу второго блока умножёния, второй вход которого через первый релейный блок соединен с выходом первого сумматора, а выход блока реверса подключен к второму входу .первого блока умножения, отличающийся тем, что, с целью расширения области применения привода, он содержит второй сумматор и последовательно соединенные второй нелинейный блок, третий сумматор, второй релейный блок и третий блок умножения, выход которого подключен к входу блока реверса, а второй вход - к выходу второго сумматора, первый вход которого соединен с выходом первого сумматора, а второй вход с выходом второго блока умножения, второй вход третьего сумматора подключен к входу первого выпрямителя, а вход второго нелинейного блока соединен с выходом второго выпрямителя. Источники информации, принятые .во внимание при эксперти:зе 1.Павлов Л.. Синтез релейных . систем, оптимальных п6 быстродействию. М., Наука, 1966, с. 309-31. 2.Авторское свидетельство СССР № 59766, кл. G 05 В 11/16, 1973 прототип).
