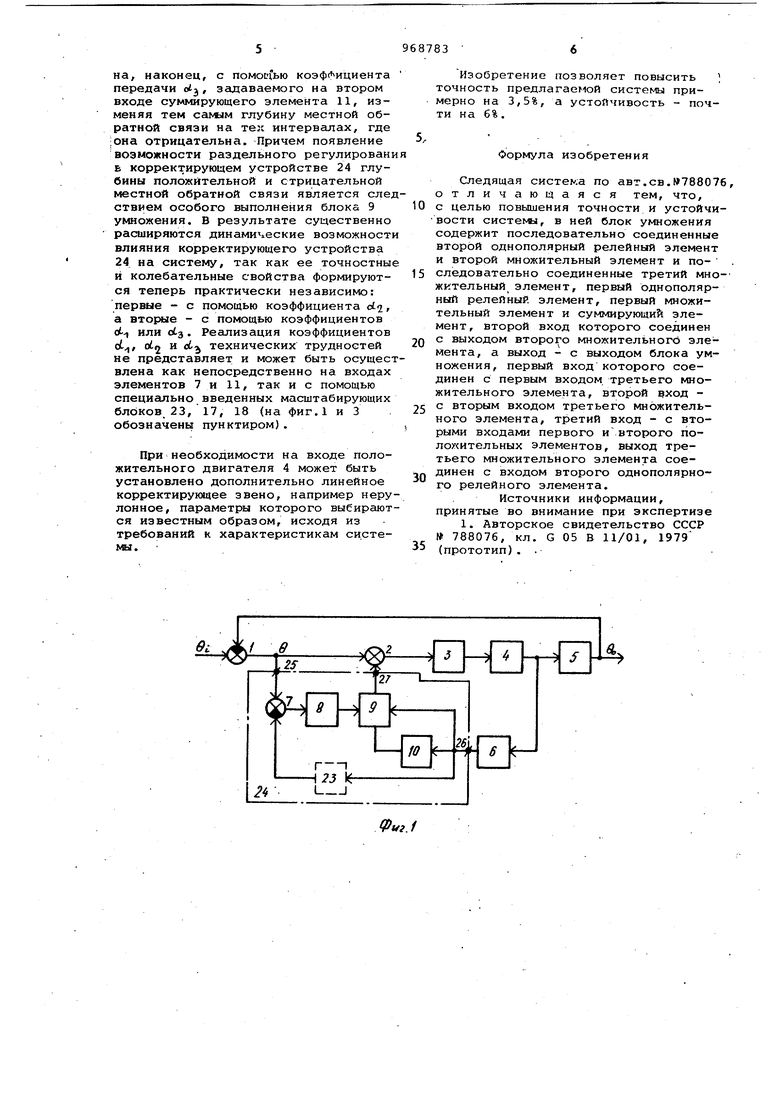
(54) СЛЕДЯЩАЯ .СИСТЕМА Изобретение относится к автоматике, а именно к следящим системам, и может быть использовано для повышения их помехозащищенности и улучшения качества переходных процессов. По основному авт.св. № 788076 известна следящая система, содержащая последовательно соединенные измеритель рассогласования сумматор, усилитель, исполнительный двигатель, вал которого через редуктор соединён с вторым входом измерителя рассогласования и непосредственно с валом тахогенератора, выход которого через блок умножения соединен с вторым входом сумматора и непосредственно с первым входом элемента сравнения, с вторым входом которого соединен вход измерителя рассогласования, с выходом через первый блок сиг натуры - второй вход блока умножения третий вход которого подключен к выходу второго блока сигнатуры, вход второго блока сигнату соединен с выходом тахогенератора l. Недостатками известной систег яв ляются ее низкие точность и устойчивость из-за того, что глубина скоростной обратной связи одинакова как при положительном, так и при отрицательном сигнале на выходе тахогенератора. Целью изобретения является повышение точности и устойчивости системы. Поставленная цель достигается тем, что в системе блок умножения содержит последовательно соединенные второй однополярный релейный элемент и второй множительный элемент и последовательно соединённые третий множительный элемент, первый однополярный элемент, первый множительный элемент и суммирующий элемент, второй вход которого соединен с выходом второго множительного элемента, а выход - с выходом блока умножения, nepBt вход которого соединен с первым входом третьего множительного элемента, второй вход - с вторым входом третьего множительного элемента, третий вход - с вторыми входами первого и второго множительных элементов, выход третьего множительного элемента соединен с входом, второго однополярного релейного элемента.. На фиг.1 представлена структурная схема системл; на фиг.2 - эпюры напряжения, поясняющие ее работу; на
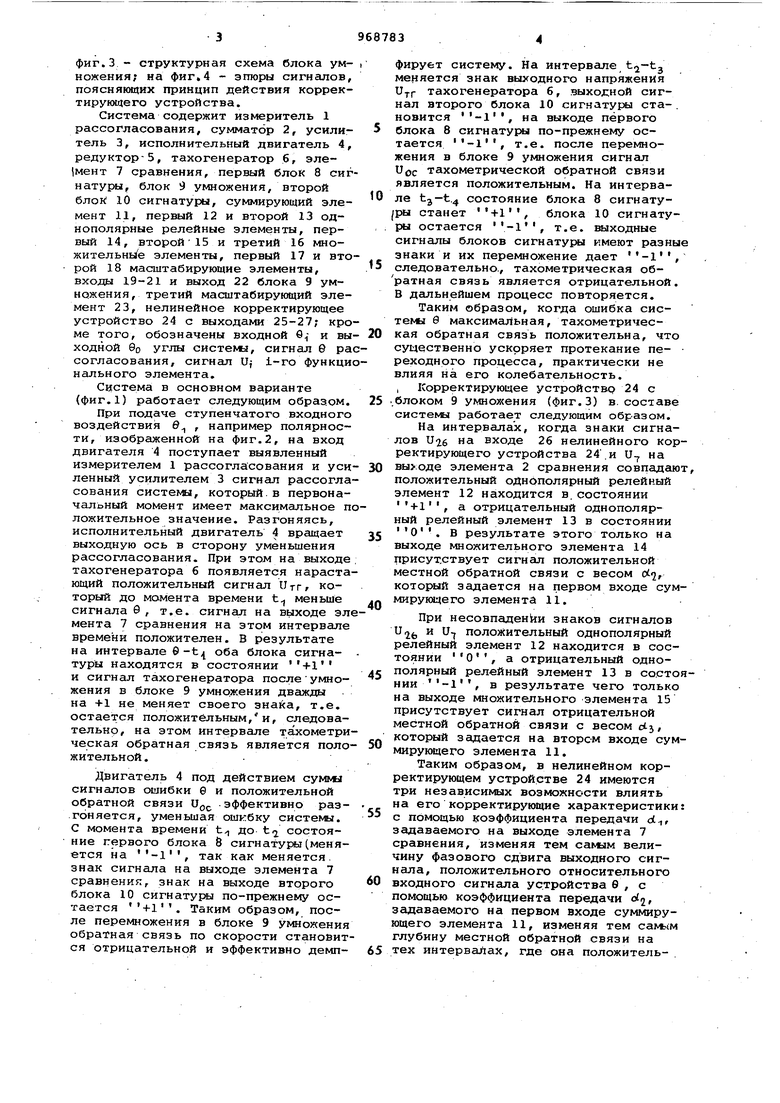
фиг.З - структурная схема блока ум- i ножения; на фиг,4 - эпюры сигналов, поясняющих принцип действия корректирующего устройства.
Система содержит измеритель 1 рассогласования, сумматор 2, усилитель 3, исполнительный двигатель 4, редуктор-5, тахогенератор 6, элемент 7 сравнения, первый блок 8 сигнатуры, блок 9 умножения, второй блок 10 сигнатуры, суммирующий элемент 11, первый 12 и второй 13 однополярные релейные элементы, первый 14, второй 15 и третий 16 мноительнь е элементы, первый 17 и второй 18 масштабирующие элементы, входы 19-21 и выход 22 блока 9 умножения, третий масштабирующий элемент 23, нелинейное корректирующее устройство 24 с выходами 25-27; кроме того, обозначены входной и выходной 9о углы системы, сигнал Q рассогласования, сигнал и 1-го функционального элемента.
Система в основном варианте (фиг.1) работает следующим образом.
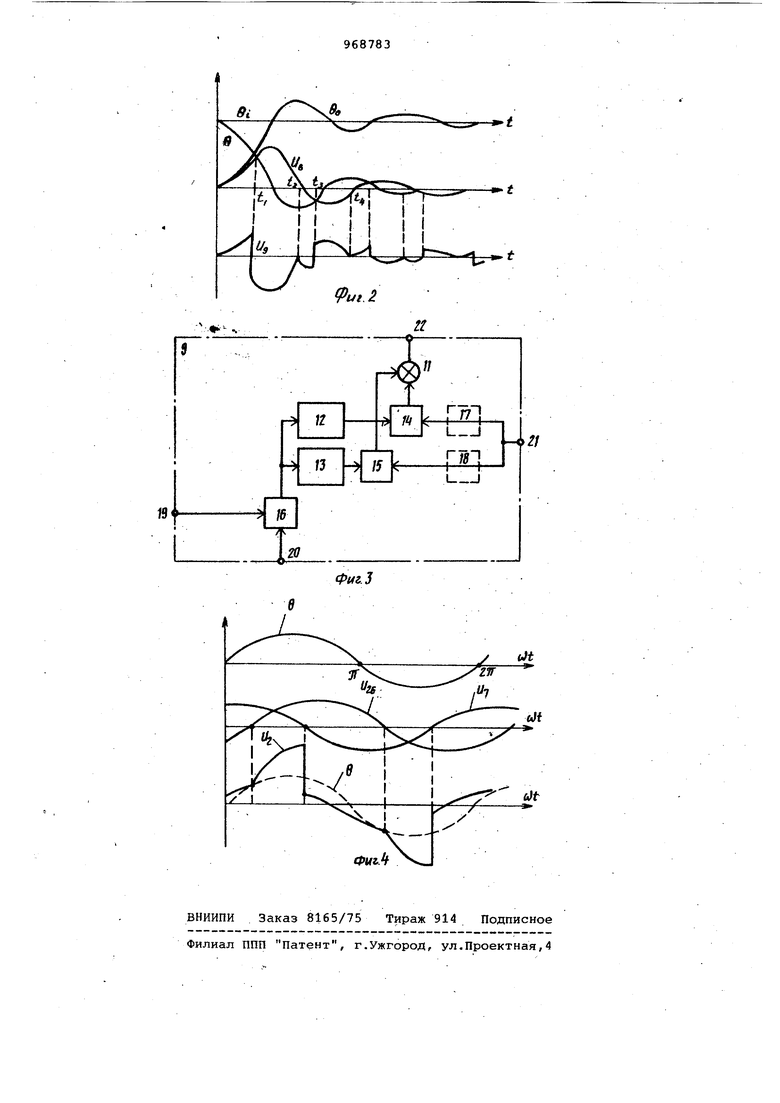
При подаче ступенчатого входного воздействия в , например полярности, изображенной на фиг.2, на вход двигателя 4 поступает выявленный измерителем 1 рассогласования и усиленный усилителем 3 сигнал рассогласования системы, который.в первоначальный момент имеет максимальное положительное значение. Разгоняясь, исполнительный двигатель 4 вращает выходную ось в сторону уменьшения рассогласования. При этом на выходе ; тахогенератора б появляется нарастающий положительный сигнал Птг, который до момента времени t меньше сигнала б, т.е. сигнал на выходе элемента 7 сравнения на этом интервале времени положителен. В результате на интервале 0-t| оба блока сигнатуры находятся в состоянии и сигнал тахогенератора послеумножения в блоке 9 умножения дважды на +1 не меняет своего знака, т.е. остается положительным,и, следовательно, на этом интервале тахометрическая обратная связь является положительной.
Двигатель 4 под действием суммл сигналов ошибки G и положительной обратной связи UQ -эффективно разгоняется, уменьшая ошибку систекы. С момента времени t до t. состояние первого блока 8 сигнатуры (меняется на , так как меняется, знак сигнала на выходе элемента 7 сравнения, знак на выходе второго блока 10 сигнатуры по-прежнему остается . Таким образом, после перемножения в блоке 9 умножения обратная связь по скорости становится отрицательной и эффективно демпфирует систему. На интервале меняется знак выходного напряжения U-rr тахогенератора 6, зыходгной сигнал второго блока 10 сигнатуры ста-.
на выходе первого
новится
блока 8 сигнату1 л по-прежнему остается , т.е. после перемножения в блоке 9 умножения сигнал иос тахометрической обратной связи является положительным. На интервале tj-t. состояние блока 8 сигнатуры станет , блока 10 сигнатуры остается , т.е. выходные сигналы блоков сигнатуры имеют разные
знаки и их перемножение дает
. п пл. 11с с|У1Г « л 1ппг1с: .1 -л, ,
5 следовательно., тахометрическая обратная связь является отрицательной. В Дсшьнейшем процесс повторяется.
Таким образом, когда ошибка системл 0 максимальная, тахометричес0 кая обратная связь положительна, что существенно ускоряет протекание пе- реходнрго процесса, практически не влияя на его колебательность. I Корректирующее устройству 24 с 5 ..блоком 9 умножения (фиг.З) в. составе системы работает следующим образом.
На интервалах, когда знаки сигналов на входе 26 нелинейного корректирующего устройства 24.и U- на 0 выходе элемента 2 сравнения совпадают, положительный однополярный релейный элемент 12 находится в.состоянии , а отрицательный однополярный релейный элемент 13 в состоянии О. В результате этого только на
выходе множительного элемента 14 присутствует сигнал положительной местной обратной связи с весом Ы, который задается на первом входе суммирукядего элементй 11.
При несовпадении знаков сигналов и 24, и U-J положительный однополярный релейный элемент 12 находится в сосО
, а отрицательный однотоянии
13 в со.стоя5 полярный релейный элемент НИИ , в результате чего только
на выходе множительного элемента 15 присутствует сигнал отрицательной местной обратной связи с весом otj/ который задается на втором входе суммирующего элемента 11.
Таким образом, в нелинейном корректирующем устройстве 24 имеются три независимых возможности влиять на его корректирующие характеристики: с помощью коэффициента передачи d-,, задаваемого на выходе элемента 7 сравнения, изменяя тем cahtiM величину фазового сдвига выходного сигнала, положительного относительного 0 входного сигнала ус.тройства б , с помощью коэффициента пер1едачи d, задаваемого на первом входе суммирующего элемента 11, изменяя тем caKfciM глубину местной обратной связи на 65 тех интервалах, где она положительна, наконец, с помощью коэф(ициента передачи oij, задаваемого на втором входе суммирующего элемента 11, изменяя тем самлм глубину местной обратной связи на тех интервалах, где |она отрицательна. Причем появление возможности раздельного регулировани Е корректирующем устройстве 24 глубины положительной и отрицательной местной обратной связи является следствием особого выполнения блока 9 умножения. В результате существенно расширяются динамические возможности влияния корректирующего устройства 24 на систему, так как ее точностные и колебательные свойства фор1«1ируются теперь практически независимо: первые - с помощью коэффициента otj, а вторые - с помощью коэффициентов , или . Реализация коэффициентов d, /2 и ot технических трудностей не представляет и может быть осуществлена как непосредственно на входах элементов 7 и 11, так и с помощью специально введенных масштабирующих блоков 23, 17, 18 (на фиг.1 и 3 обозначены пунктиром).
При необходимости на входе положительного двигателя 4 может быть установлено дополнительно линейное корректирующее звено, например нерулонное, параметры которого выбираются известным образом, исходя из требований к характеристикам системы.
Изобретение позволяет повысить точность предлагаемой системы примерно на 3,5%, а устойчивость - почти на 6%.
5.
Формула изобретения
Следящая систека по авт.св.№788076, отличающаяся тем, что, с целью повышения точности и устойчивости система, в ней блок умножения содержит последовательно соединенные второй однополярный релейный элемент и второй множительный элемент и по- . следовательно соединенные третий множктельный элемент, первый однополярный релейный элемент, первый множительный элемент и суммирующий элемент, второй вход которого соединен с выходом второго множительного элемента, а выход - с выходом блока умножения, первый вход которого соединен с первым входом третьего множительного элемента, второй вход с вторым входом третьего множительного элемента, третий вход - с вторыми входами первого и второго положительных элементов, выход третьего множительного элемента соединен с входом второго однополярного релейного элемента.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 788076, кл. G 05 В 11/01, 1979 (прототип). .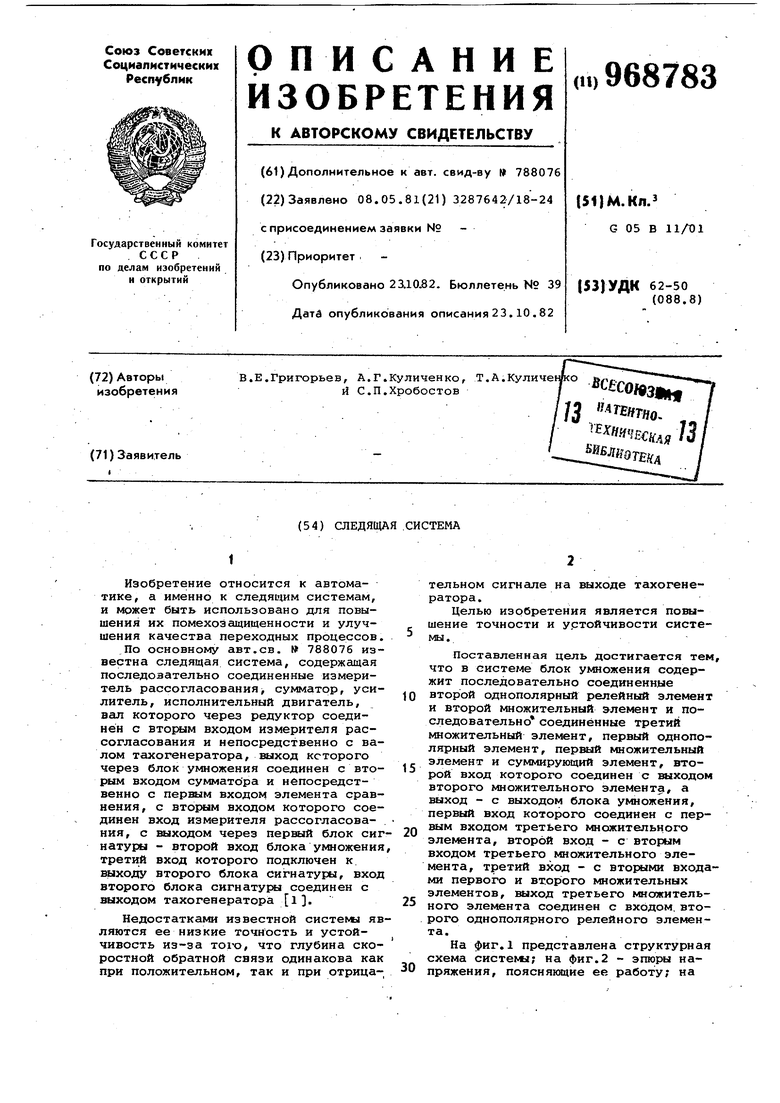
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Релейная следящая система | 1986 |
|
SU1399696A1 |
| Релейная следящая система с нелинейной коррекцией | 1985 |
|
SU1312523A1 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Псевдолинейное корректирующее устройство | 1976 |
|
SU640248A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| Псевдолинейное корректирующее устройство | 1977 |
|
SU703772A1 |