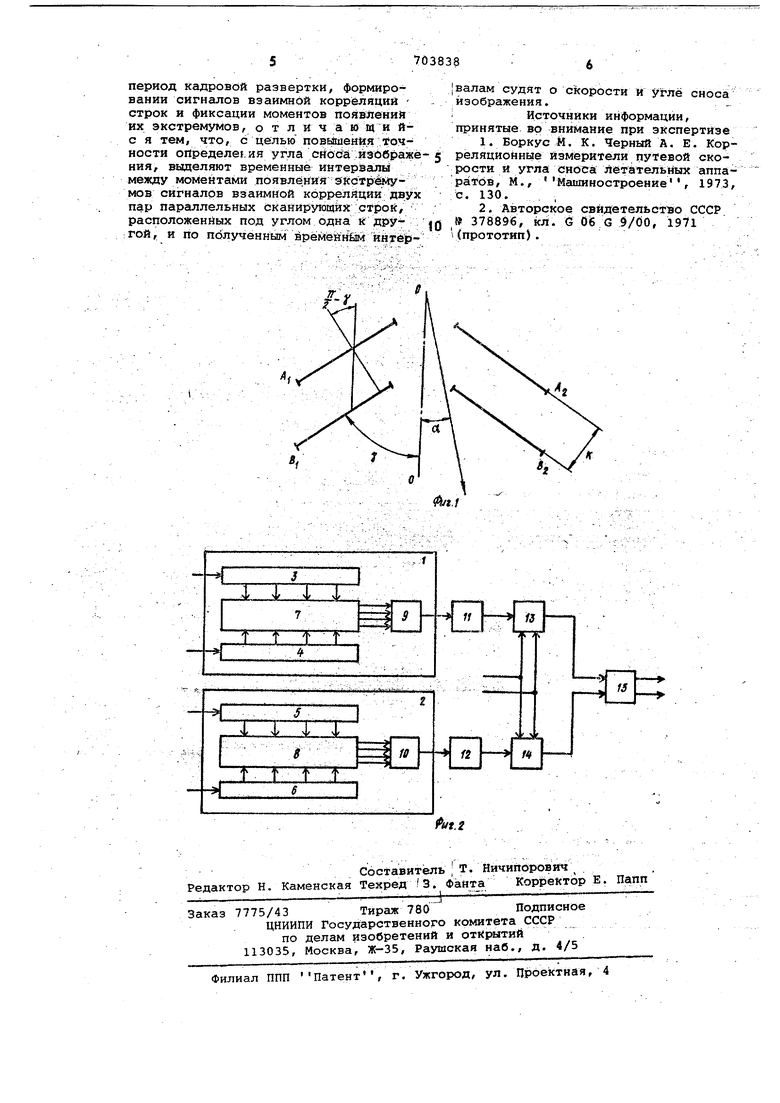
Изобретение относится к области автоматики и вычислительной техники и может быть использовано при создании автономных систем нави.ации летательных аппаратов, движущихся в верхних слоях атмосферы относительно подстилающей поверхности земли. Известны способы определения пара метров движения изображения подстила ющей поверхности 1, основанные на корреляционных измерениях. ЭТИ способы имеют низкую точность определения углов сноса при перемеще нии изображения. i НаиС5олее близким по техническ.ой сущности к данному изобретению является способ определения скорости движения и угла сноса изображения со случайным распределением яркостей, основанный на сканировании изображения строками, сдвинутыми во времени на период кадровой развертки, формирования сигналов взаимной корреляции строк и фиксации моментов появлен яя их экстремумов 2. .Однако такой способ имеет низкую точность определения параметров движения изображения. Цель изобретения - повышение точности определения угла сноса изображения.- . . Указанная цель дост-игается в предлагаемом способе тем, что выделяют временные интервалы меЖду моментами Появления экстремумов сигналов взаимной корреляции двух пар параллельных сканирующих строк, распо- ложенных под углом одна к другой, и по полученным временным интервалам судят о скорости и угле сноса изображения . На фиг. 1 изображена картина сканирования движущегося изображения; на на фиг. 2 - блок-схема устройства, реализующего предшагаемый способ. Набегающее изображение сканируется симметричными (относительно оси ОО), расположенными одна к другой под углом 2 jr (или соответственно под углом 7 °: симметрии ОО) двумя парамр строк. Строки каждой пары и парсшлельны и разнесены на кадровое расстояние К. Корреляторы 1 и 2 выполнены,соответственно на регистрах 3, 4 и 5, б, поразрядных схемах перемножения 7 и 8 (для перемножения соответствующих разрядов ре гистров) и сумматорах 9 и 10 выходных сигналов схем перемножения 7 и 8 Указатели 11 и 12 экстрейума видают сигналы при пйявлении экстремумов в аимньах корреляцйонньах функций. Мо;менты появлений экстремумов относителжно начала pTC4ista - кадровые ийтервалы задержек , определяют окорость и угол сноса при пергмёщенйи изображения. Блокл 13 и 14 вйделяют моменты появления экстремумов, кото рые преобразуются вычислительным блоком 15 в выходные сигналы. Данная картина сканирования и алгоритм обработки сигналов двух пар строк позволяет повысить точность из мерения углов сноса при перемещении изображения. Фиксирование измеритель ной базы наклонными строками при одном и том же угле сноса увеличивает в cosi- перемещение изображения ,в строчном направлении,что эквиваленТно увеличению эффективной; разрешающей способности, определяю- щей точность измерения. Для получени данных о скорости и угле сноса изображения, в предлагаемом способе необходимо измерять только кадровые интервалы задержек экстремумов взаимных корреляционных функцийдвух пар строк, что снижает требования к разрешающей Способности и ведет к по еышению точности. , Сигналы сканирования строк А и A синхронно записывают соответственно в регистры 3 и 5, где они хранятся на цикле измерения (кадровый период), Сигналы .сканирования строк В и Вд синхронно записывают соответсзтвенно в регистры 4 и б , причём вд)1ёйя пЬслеДующая строки выталкйвает предыдущую. В сумматорах9 и 10 суммируют результаты поразрядного перемаожейия значений одноименных соотвётс еёующихПар регистров - 3, 4 и 5 6. Таким образом находят иве величи ны/ пропорциональные взаимным корреляционным функциям реализаций разложений строк ,j и . Указатели моментов времени появления экстремумов выдают импульсы в Моменты времени появления экстремумов. Блоки 13 и 14 выделяют моменты появления экстре относительно начала отсчета, определяя тем самым кадровые интерва лы задержки Т и Т. При движении изображения по ;бсй сйШётрий 60, йЬявление эксТремумЬв взаимных кьр|эёййцйойных ФУНКЦИЙ возможно лишь одновременно и в моменты окончания считывания строк, то есть в момент отсутствия , сдвигов реашизаций в сдвиговых регис pax один Относительно другого. При этом кадровые интервалы задержек оди наковы и равны
703838 т : Ф - V9ihT где V - скорость движенияизображения, Если направления движения изображения Не совпадают с осью симметрии 0, ооуЩествлйётся автоматическое центрирование реализаций npiT записи реализаций соответственно, в сдвиговые регистры 4 и 6. При этом найденные кадровые интервалы задержек неравны и описываются выражениями К V.J-in () V- inCJr- - где oL- угол сноса изображения. По значениям кадровых интервалов задержек вычисляют величины скорости и угла сноса по формулам, вытекающим из выражения (1) m) СЛа. Т- -t-Tg. гдea1 tg-r,aa--2sTnт Для малых углов сноса, которые практически всегда имеют место в реальных условиях, с достаточной степенью точности можно считать cosоС-1-.tofct-d I - у в ЭТОМ случае вычисления ведутся : по упрощ енным формулам, следуемым из выражения (2) Таким образ6м7 кадровые интервалы задержки определяют моменты появления экстрёйУмов взаимных корреляционных функций в кадровых периодахв.блоках 13 и 14, управляемых тактовой ti кадройой последовательностью импульсов. Скорость движения и угол сноса изображения вЁгчйолйют по найденный (значениям в блоке взачйсления 15. ; Использовйнйе йрёдлагйемсэго способа определения параметров движения изображения со случайным распределением Яркостей обеспечивает по сравнегнию с сУщёствующими способами повыше-, ние точности измерения углов сНоса движущегося изображения, что особенно важно для современных автономных наВйРаЦионных систем летательных аппаратов. Формула изобретения Способ определения скорости движения и угла сноса изображения, основанный на сканировании изображения строками, сдвинутыми во времени на
период кадровой развертки, формировании сигналов взаимной корреляций строк и фиксации моментов появлений их экстремумов, о т л и ч а и щи йс я тем, что, с целью повьйиенйя точности определегия угла cribda иэббражёния, выделяют временные интервал между моментами появления SKCTp iiyмов сигналов взаимной корреляции двух пар параллельных сканирующих ст)ои, расположенных под углом одна к дру- , ;Гой, и по полученным врёмёййамннгё)|валам судят о скорости и угле сноса изображения.: Источники информации, принятые во внимание при экспертизе
1.БоркусМ. К. Черный А. Е. Корреляционные йзмёpиteли путевой скорости и угла сноса летательных аппаратов, М., Машиностроение, 1973, с. 130.
2,Авторское свидетельство СССР № 378896, кл. G 0(5 G 9/бО, 1971
(прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров движения изображения со случайным распределением яркостей | 1976 |
|
SU588547A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ СО СЛУЧАЙНЫМ РАСПРЕДЕЛЕНИЕМ | 1973 |
|
SU378896A1 |
| Устройство для определения параметров движения изображения | 1981 |
|
SU994993A1 |
| Устройство для определения параметров движения изображения | 1981 |
|
SU994994A1 |
| Устройство автоматической коррекции координатных искажений телевизионного изображения | 1981 |
|
SU1012456A1 |
| Устройство для определения параметров движения контрастного изображения | 1974 |
|
SU484533A1 |
| Устройство для считывания и определения параметров движения констрастного изображения | 1976 |
|
SU717796A1 |
| КОРРЕЛЯЦИОННЫЙ ИЗМЕРИТЕЛЬ ВЫСОТЫ И СОСТАВЛЯЮЩИХ ВЕКТОРА ПУТЕВОЙ СКОРОСТИ | 2012 |
|
RU2498344C2 |
| РАДИОВЫСОТОМЕРНАЯ СИСТЕМА С АДАПТАЦИЕЙ К ГЛАДКОЙ ВОДНОЙ ПОВЕРХНОСТИ | 2015 |
|
RU2605442C1 |
| СПОСОБ ВЫДЕЛЕНИЯ ПРИЗНАКОВ ДЛЯ РАСПОЗНАВАНИЯ ОБЪЕКТА | 1990 |
|
RU2090929C1 |
tl
