(54) УСТЮЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖШИЯ ИЗОБРАЖЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров движения изображения | 1981 |
|
SU994993A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ СО СЛУЧАЙНЫМ РАСПРЕДЕЛЕНИЕМ | 1973 |
|
SU378896A1 |
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| СИСТЕМА ОБЪЕМНОЙ ВИДЕОЗАПИСИ И ВОСПРОИЗВЕДЕНИЯ | 2006 |
|
RU2315439C1 |
| ЦИФРОВАЯ ВИДЕОКАМЕРА | 2004 |
|
RU2270529C1 |
| СИСТЕМА СТЕРЕОТЕЛЕВИДЕНИЯ | 2006 |
|
RU2326508C1 |
| Способ определения параметров движения изображения со случайным распределением яркостей | 1976 |
|
SU588547A1 |
| ПРИКЛАДНАЯ ТЕЛЕВИЗИОННАЯ СИСТЕМА | 2005 |
|
RU2284672C1 |
| СИСТЕМА ТЕЛЕВИДЕНИЯ | 2007 |
|
RU2339183C1 |
| ВИДЕОКАМЕРА | 2005 |
|
RU2304361C1 |
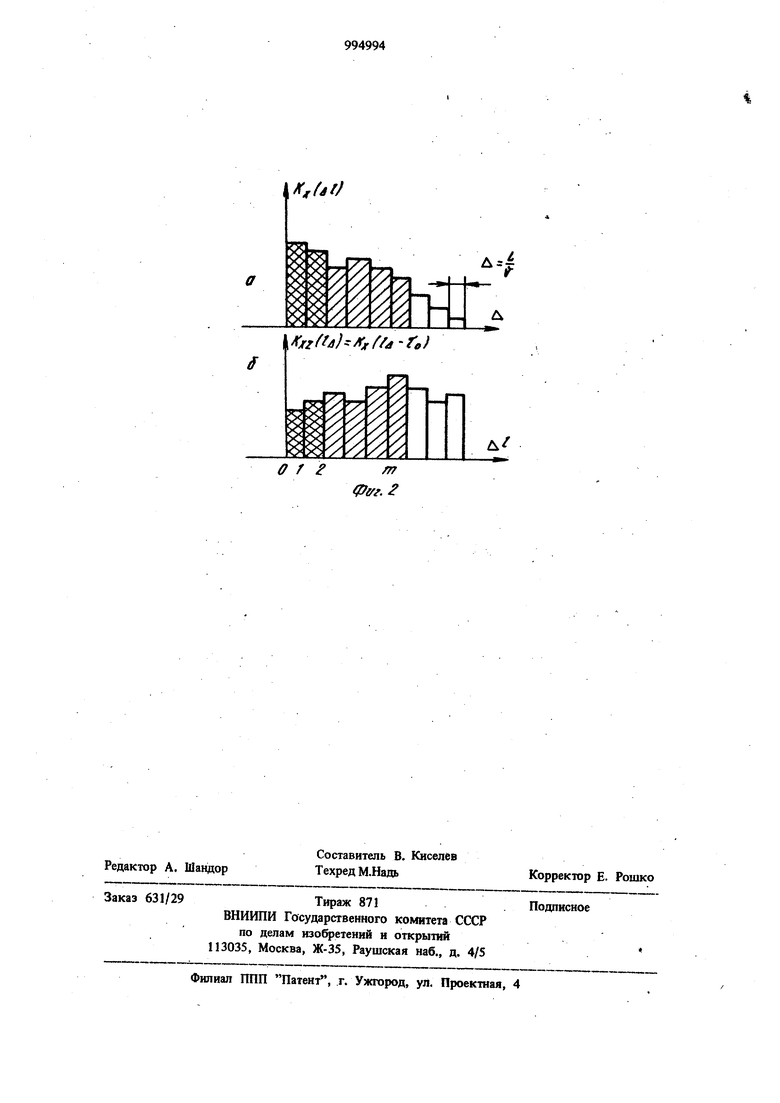
Изобретение относится к приборостроению и может быть использовано для бесконтактног намерения параметров движения движущихся фед и поверхностей. Известно устройство для определения пара метров движения изображения, основанное на измерении временного сдвига (транспортного запаздаюания) между двумя сигналами путем вычисления корреляционной фуикщга, ЭПЕХ сигналов 1. Известно также устройство для определения параметров движения изображения, содержащее фотоэлектрический преобразователь, коррелятор, состоящий из двух регистров ,одао именные выходы которых соединены с входами поразрядной схемы премнож ия, выходы которой соединены с входами сумматора, и блок управления, соединенный с управляющими входами фотоэлектрического преобразователя и коррелятора (21. Однако указанные устройства имеют низкую точность определения параметров движения изображения в случае, когда функция взаимной корреляции сигналов с фотодатчиков имеет колебательный характер, так как устройство может выйти на локальный максимум (или даже локальный минимум). При пологой форме взаимокоррелядионной функщш поиск зкстремума затруднен и также осуществляется с большой погрешностью. Кроме того, дпя исключения вероятностн выхода на локальный максимум устройство должно пройти его с запасом по времени проверить, что другого максимума нет вблизи, что снижает быстродействие устройства. Цепь изобретения - повышение быстродействия и точности измерения времени транспоргаого запаздывания и других параметров движения изображения. Указанная дель достигается тем, что в устройство введены блок дополнительного суммирования, сравнения и отсчета времени, блок вычитания, ключ и блок запаздывания на постоянную величину времени, а фотоэлектрический преобразователь вьтолнен в виде матрицы фотоприемников, при этом вход 3.99 ключа подключен к выходу матрицы и входу второго регистра, выход ключа подключен к первому входу блока вычитания непосредственно, а к второму - через блок запаздывания, выход блока вычитания подклю чей к входу первого регистра, выход коррелятора соединен с входом блока дополнительного суммирования, сравнения и отсчета времени, блок управления подключен к управляющему входу ключа и выходу блока дополнительного суммирования, сравнения и отсчета времени. На фиг. 1 представлена схема устройства; на фиг. 2 - возможный вид автокорреляционной функции K.j(f а ) сигнала первого фотоприемника (а) и взаимокорреляционной функции К. 2 (2 ) сигналов первого и второго фотоприемников (б). Устройство содержит матрицу 1 фотоприем ников, например строчно-кадровую матрицу прибора с зарядовой связью (ПЗС), выход которой соедю(ен с входом ключа 2 и вторым регистром 3 коррелятора 4, в который входят также первый регистр 5, поразрядная схема 6 перемножения, выходы которой подключены к сумматору 7. Выход ключа 2 подключен к инвертирующему входу блока 8 вычитания непосредственно, а к неинвертирую щему входу блока 8 вычитания через блок 9 постоянного временного запаздывания. Выход сумматору 7 соединен с входом блока 10 до полнительного суммирования, сравнения и отсчета времени, выход которого является вы/ходом устройства. Блок 11 управления подключен к матрице 1 фотоприемников (импул сы строчной и кадровой разверток), управляющему входу ключа 2, коррелятору 4, выходу блока 10 дополнительного суммирования, сравнения и отсчета времени Устройство работает следующим образом. На нулевом такте работы в момент времени tp экспонируется матрица 1 фотоприем1ШКОВ, начинается отсчет времени в блоке 10. Изображение в верхней (нулевой) строке матрицы X(tp) представляет собой последовательность импульсов, амплитуда которы пропорциональна освещенности в ячейке строки. Изображение У(1), записанное в первой строке матрицы 1, отстоящей от нулевой строки на расстоянии L, можно рассматриват как изображение в нулевой строк X (tg), смещенное на время запаздывания Л L / V , где V - скорость движения изображения, т. е, Х(гд) через время л проишо бы расстояние L со скоростью V и заняло бы место изображения У-,(1д) X(). В качестве Л выступает запаздывание (транспортное) движущегося со скоростью V изображения во втором фотоприемник тносительно первого фотоприемиика, разнесеные на кадровое (базовое) -расстояние. Изобажение У2(1д), записанное во второй строке, аналогично может быть представлено так 2 о) о расстояние между троками, что обычно и имеет место, одинакоое и равно L. Вообще для любой из строк атриц может быть предложена модель Ye (to) X (to- НА), де 1 О, I, 2, ..., N. Штриховкой в блоке показаны для приера регистры памяти в строчно-кадровой атрице ПЗС куда У g (t) заносятся на нуевом такте работы и откуда они затем по дному опрацшваются соответствующими ко- , андами блока И управления. На нулевом такте ключ 2 открыт и в егистр 5 записывается разность X(tQ)-zitj x(t)-(t,)x(to;-x(vt), где Z (to) X (tp- Т ),LO - эталонное запаздывание,, вносимое блоком 9. Затем ключ 2 закрывается, а разность хранится в регистре 5 в течение всего цикла измерения, умножаясь поразрядно в схеме 6 на нулевом и последующих тактах работы на сигнал, поступающий в регистр 3. После перемножения в схеме 6 результаты суммируются в сумматоре 7, т. е. формируется ,на каждом такте работы разность оценок ординат двух корреляционных функций MtMi,)-2(t)J3,it j (Р)- (, где М - оператор усреднения по множеству, реализуемый сумматором 7, В О, 1, 2,..., N. Указанные разности заносятся в блок 10, суммируются , начиная с первого такта, и сравниваются с нулем, т. е. формируется величина)-к; Ел-с)Гк(е.)-Гк(е.-г,), равная разности площадей двух заштрихованных на фиг. 2 а и б фигур, m переменный верхний индекс суммирования (для примера на рис. 2 m 2). Очевидно, что при любом виде корреляционной функции указанные площади будут равны в единственном случае L о L о V т А tjj , или m - Таким образом, номер rri строки матрицы фотоприемников (номер такта работы устройства), при котором накопленная разность cue5 994нок ординат корреляционных функций будет равна нулю 11к(ед)К5(ел-.)о будет прямо пропорционален скорости движения изображения и в этот момент на выходе блока 10 появляется отсчет. После получения отсчета мсигнал поступает в блок 11 и работа устройства повторяется сначала заданием соответствующих команд блоком И. Предлагаемое устройство обеспечивает высо кую точность определения параметров движения изображения, некритично к виду корреляционной функции сигналов изображения. Отсчет производится сразу же в момент достижения абсциссы максимума сформированной взаимокорреляциопной функции (при этом максимум в явном виде не определяется). Быстродействие устройства, длительность цикла измерения определяется целиком и пол ностью лишь быстродействием выполнения арифметических операций опроса матрицы, перемножения, суммирования. В предлагаемом устройстве отпадает необходимость в реализации специального Гока Центрирования хотя бы одного из , отсутствует указатель экстремума функГи реализация которого обычно сложна, формула изобретения Устройство для определения параметров движения изображения, содержащее фотоиектрический преобразователь, коррелятор, остоящий из двух регистров, однримсиные выходы которых соединены с входами поразрядной схемы перемножения, выходы которой подключены к входам сумматора, и блок управления, соединенный с управляющими входами фотоэлектрическогопреобразоватеяя и коррелятора, отличающееся тем, .что, с целью повышения быстродействия и точности, в него введены ключ, блок постоянного временного запаздывания, блок вычитания и блок дополнительного суммирования, сравнен и отсчета времени, вход которого подключен к выходу коррелятора, а выход - к входу блока управления, при этом фотоэлектрический преобразователь вьтолнен в виде матрицы фотоприеминков, выход которой соединен через ключ с первьт входом блока вычитания, подключенного к входу первого регистра, и непосредственно с входом второго регистра, управляющий вход ключа соединен с блоком управления, а рто, рой вход блока вычитания соединен через блок постоянного временного запаздывания с выходом ключа. Источники информации, принятые во внимание при экспертизе 1.Козубовский С. Ф. Корреляционные экстремальные системы. Киев, Наукова думка, 1973 с. 7. 2.Авторское свидетельство СССР № 378896, кл. G 06 G 9/00, 1971 (прототип).
0lfr.f
/r/7//W-/ r/7-f-/W
о г г т
фуг.
