(54) УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ
1
Изобретение относится к приборостроению и может быть использовано для бесконтактного измерения параметров движения дни- . жущихся сред и поверхностей.
Известно устройство для определения ско рости движения изображения, основанное на определении временного сдвига (транспортно го запаздывания) между двумя сигналами путем вычисления взаимной корреляционной функции этих сигналов 1 .
Известно также устройство для определения параметров движения изображения, содержащее два фотоприемника, коррелятор, состоящий из двух регистров, одноименные выходы которых соединены с входами поразрядной схемы перемножения, выходы которой соединены с входами сумматора, и блока управления, управляющие выходы которого подключены к коррелятору и фотоприемникам 2.
Однако указанные устройства имеют низкую точность определения параметров движения изображения в том случае, если функция
ИЗОБРАЖЕНИЯ
взаимной корреляции двух сигналов имеет колебательный характер и локальные зкстремумы, кроме главного, так как устройство может выйти вместо главного экстремума на локальные (даже на минимум, а не максимум).
Кроме того, при пологой форме вэаимокорреляционной функции поиск точки экстремума затруднен, следовательно, время транспортного запаздывания будет определяться
10 со значительной ошибкой.
Целью изобретения является повышение точности измерения параметров движения изображения.
15
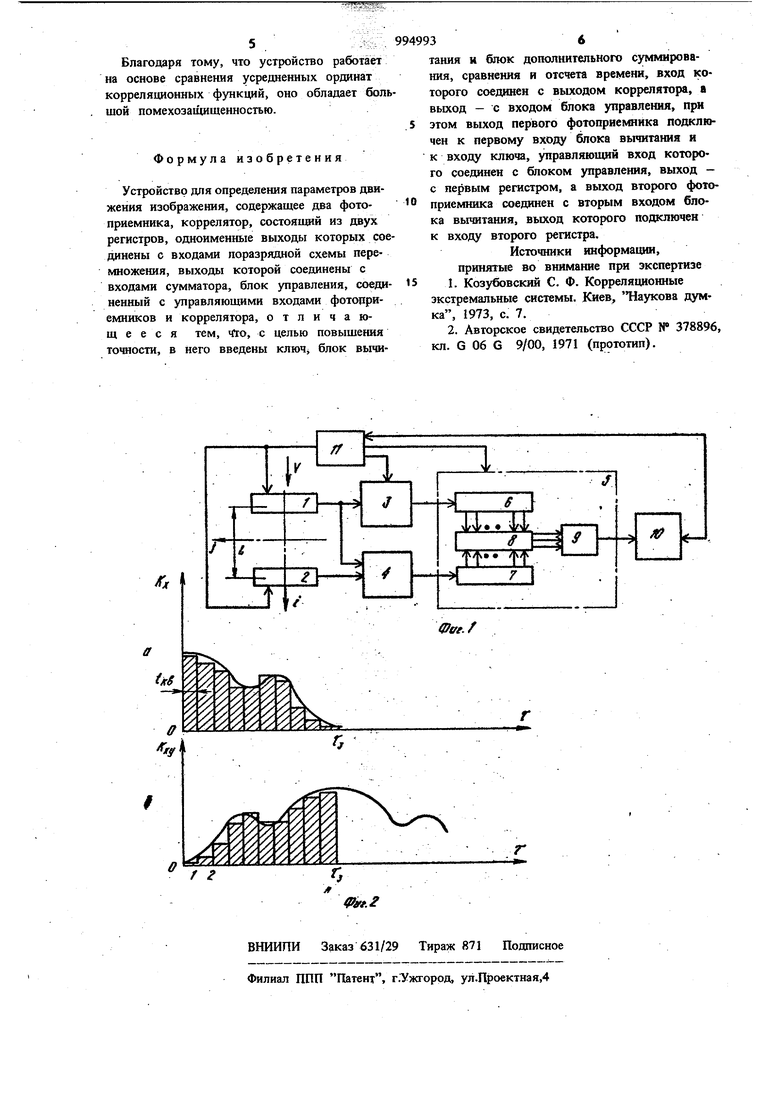
Цель достигается тем, что в устройство введены блок дополнительного суммирования, сравнения и отсчета времени, блок вь1читания и ключ, вход которого соединен с выходом первого фотоприемника и с пер20вым входом блока вычитания, второй вход которого подключен к выходу второго фотоприемника, а выход блока вычитания соеданен с входом второго регистра, при этом выход ключа соединен с входом первого регистра, а выход сумматора - с входом блока дополнительного суммирования, сравнения и отсчета времени, блок управления подключен к управляющему входу ключ и выходу блока донолнительното суммирования, сравнения и отсчета времени. На фиг. 1 изображена схема устройства; на фиг. 2 а, б - возможный вид автокорреляционной функции сигнала с первого фотоприемника и взаимокорреляционной функции сигналов первого и второго фотоприемников соответственно. Устройство содержит два фотоприемника 1 и 2, расположенные на расстоянии L друг от друга, при этом выход фотоприемника 1 соединен с входом ключа 3 и с первым вх дом блока 4 вычитания, второй вход которого (инвертирую.щий) соединен с выходом фотоприемника 2, а выходы ключа 3 и блока 4 вычитания соединены с входами коррелятора 5, кото{ ый состоит из регистров 6 и 7, поразрядной схемы 8 перемножения, выходы которой подключены к сумматору 9, выход которого соединен с входами- блбка .10 допольштельного суммирования, сравнения и отсчета времени, выход которого является выходом устройства. Бло 11 управления подключен к фотоприемникам 1 и 2, управляющему входу ключа 3, коррелятору 5, выходу блока 10 дополнительного суммирования, сравнения и отсчета времени. Устройство работает следующим образом. Изображение сканируется двумя фотоприемниками (например, двумя линейными приемниками с зарядовой связью), отстоящими друг от друга на кадровое расстояние L На нулевом такте работы устройства сигнал с выхода первого фотоприемника 1 через замкнутый ключ 3 записывается в регистр 6, где он хранится в течение всего цикла измерения (кадрового периода). Этот сигнал представляет собой последовательность имцульсов, амплитуда которых пропорционал на освещенности в ячейке строки. В блоке 10 дополнительного суммирования, сравнения и отсчета времени начинается отсчет времени. Одновременно указанный сигнал поступа ет на первый вход блока 4 вычитания. На второй вход блока 4 вычитания поступает с нал с второго фотоприемника 2. В блоке 4 формируется разность зтих сигналов, котора записывается в регистр 7 коррелятора 5. В поразрядной схеме 8 перемножения зна чения одноименных .разрядов регистров 6 и 7 непрерывно перемножаются, а результаты перемножения суммируют в сумматоре 9. 9 4 Таким образом, на нулевом такте работы устройства вычисляется путем усреднения по множеству разность оценок ординат автои взаимокорреляционных функций сигналов фотоприемников при нулевом аргументе. Вычисленная разность заносится в блок 10, где она сравнивается с нулем. Так как она не равна нулю (фиг. 2а, 26), то на первом и последующих тактах работы устройства в регистр 7 поступает разность двух преобразованных в электрическую форму видеосигналов с фотоприемников 1 и 2. Каждое последующее значение разности выталкивает из регистра 7 предыдущее значение и, после поразрядного .перемножения значений регистров 6 (ключ 3 после нулевого такта работы устройства разомкнут и в регистре 6 хранится все время реализация нулевого такта) и 7 и усреднения но множеству, в блоке 9 указанные разности дополнительно суммируются в блоке 10, начиная с первого такта, и сравниваются с нулем. Таким образом сравниваются площади заштрихованных фигур (фиг. 2а, 26) при их ступенчатой аппроксимации. Очевидно, они будут равны лишь при t где п - число тактов, при котором результат сравнения в блоке Ш станет равным нулю; период квантования; транспортное запаздывание изображения на расстоянии L при движении его со скоростью V. Таким образом, при будет выполнено условие равенства соответствующих площадей, отсчет времени прекращается, на выходе блока 10 появляется сигнал, пропорциональный времени транспортного запаздывания изображения. На блок 11 подается сигнал окончания цикла измерения. Таким образом при отсутствии сноса изображения, т.е. если направление вектора движения изображения совпадает с осью i (фиг. I), зная (Гд , можно определить . скорость движения изображения по формуле - - . Затем работа устройства повторяется с нулевого такта работы. При наличии угла сноса изображения с помощью предлагаемого устройства можно определить проекцию вектора скорости на ось i. Чтобы определить проекцию вектора скорости на ось j можно использовать аналогичное устройство, расположив фотоприемники перпендикулярно оси J. Зная составляющие вектора скорости,. можно определить модуль вектора скорости и угол сноса изображения.
Благодаря тому, что устройство работает на основе сравнения усредненных орданат корреляционных функщ|й, оно обладает боль шой помехозащищенностью.
Формула изобретения
Устройство для определения параметров движения изображения, содержащее два фотоприемника, коррелятор, состоящий из двух регистров, одноименные выходы которых соединены с входами поразрядлой схемы перемножения, выходы которой соединены с входами сумматора, блок управления, соединенный с управляющими входами фотоцряемников и коррелятора, отличающееся тем, 4to, с целью повыщения точности, в него введены ключ блок вычи949936
танин и блок дополнительного суммирования, сравнения и отсчета времени, вход которого соединен с выходом коррелятора, а выход - с входом блока управления, при .5 этом выход первого фотоприемника подключен к первому входу блока вычитания и к входу ключа, управляющий вход которого соединен с блоком управления, выход - с первым регистром, а выход второго фото10приемника соединен с вторым входом блока вычитания, выход которого подключен к входу второго регистра.
Источники информации, принятые во внимание при экспертизе
1.Козубовский С. Ф. Корреляционные
15 экстремальные системы. Киев, Наукова думка, 1973, с. 7.
2.Авторское свидетельство СССР N 378896, кл. G 06 G 9/00, 1971 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения параметров движения изображения | 1981 |
|
SU994994A1 |
| Устройство для определения составляющих вектора скорости движения изображения | 1983 |
|
SU1233190A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ИЗОБРАЖЕНИЯ СО СЛУЧАЙНЫМ РАСПРЕДЕЛЕНИЕМ | 1973 |
|
SU378896A1 |
| Способ определения параметров движения изображения со случайным распределением яркостей | 1976 |
|
SU588547A1 |
| Устройство для определения параметров движения контрастного изображения | 1974 |
|
SU484533A1 |
| Устройство для распознавания прямого края объекта | 1988 |
|
SU1587552A1 |
| РАДИОПРИЕМНОЕ УСТРОЙСТВО МНОГОЧАСТОТНЫХ СИГНАЛОВ | 2005 |
|
RU2310992C2 |
| Способ управления вытягиванием волокон при формовании и устройство для его осуществления | 1989 |
|
SU1686047A1 |
| РЕЦИРКУЛЯЦИОННЫЙ КОРРЕЛЯТОР РАЗРЕШЕНИЯ ФАЗОКОДОМАНИПУЛИРОВАННЫХ СИГНАЛОВ | 2005 |
|
RU2283541C1 |
| Устройство для поворота вектора (его варианты) | 1982 |
|
SU1078431A1 |
