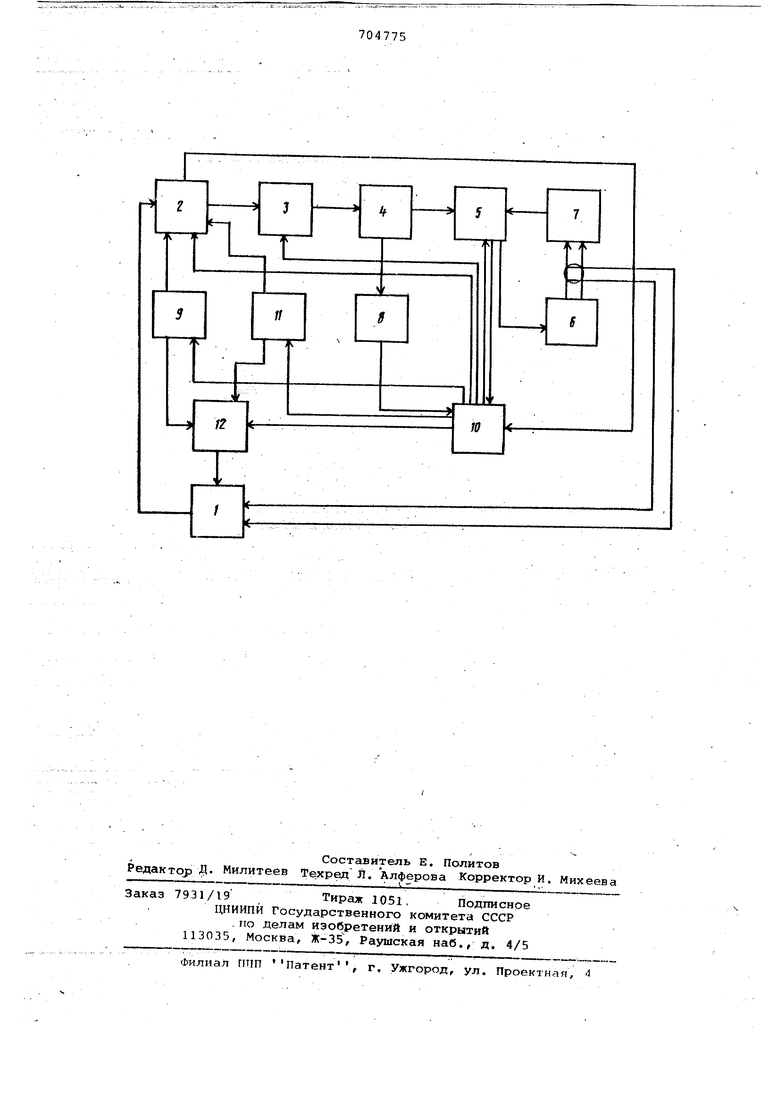
1: Изобретение относится к области робототехники и может быть использовано для управления адаптивным роботом при автоматизации производственных процессов, Известны устройства для управления адаптивными роботами. Устройство 11 содержащее информационную; поверхность в виде системы чувствительных элементов, на которую устанавливают объект манипулирований, щуп на схвате и экран, обладает тем недостатком, что имеет значительную сложность и громоздкость, что затрудняет применение его в производственных условиях.V Наиболее, близким техническим решением к данному изобретению является устройство Л, содержащее последовательно соединенные блок вв да изображения, установленный на схвате робота, операционный.блок, коммутатор команд, блок памяти, бло формирования сигналов перемещения, приводы и блок датчиков положения исполнительного органа робота, выход которых подключен ко второму входублока формирования сигналов перег/)ещения, а второй выход блока памяти соединен со входом нуль-органа. Недостатком этого устройства является невозможность определения угла ориентации детали на рабочей по-, верхности, что приводит к необходимости применения для взятия детали вакуумных или электромагнитных схватов, позволяющих захватывать деталь лишь на основании информации о центре тяжести детали. Однако, при помощи этих схватов нельзя захватить детали со сложной поверхностью (при помощи вакуумных схватов) и детали, изготовленные из немагнитны : материалов (при помощи электромагнитных схватов). Целью изобретения яв.ляется расйшрение функциональных возможностей устройства. Сущность изобретения заключается в тЬм, что устройство содержит блок круговой развертки и последовательно соединенные блок управления, блок формирования прямоугольного растра и коммутатор раз.черток, выход которого подключен ко входу блока ввода . изображения, а второй вход - к первому выходу блока круговой развертки, второй выход которого соединен со вторым входом операцион1нЬго блЪка, второй выход которого подключен к первому взводу блока управления, второй вход которого сощинен со вторым выходом блока формирования сигналов перемещен 1я, третий вход с вйходом нуль-органа, второй выход с третьим входом блока формирования ,сигналов перемещения, третий-выход .со вторым входом коммутатора команд четвертый выход - с третьим входом о рациойного блока, пятый выход - с входом блока круговой ра вертки, шестой выход - с третьим входом кОммутатора разверток; На чертеже представлена блок-схема устройства. Устройство содержит блок 1 ввода изображения, операционный блок 2, коммутатор 3 4 памяти, блок ,5 формирования сигналов перемещения, приводы б исполнительного органа робота, блок 7 датчи ков положения исполнительного орга на р(эбота, нуль-орган 8, блок 9 круговой развертки, блок 10 управления блок 11 формирования прямоугольного растра, коммутатор 12 разверток. Устройство работает следующим образом. Положение детали на рабочей поверхности определяется координа-тами ее центра тяжести X и углом ориентации оси симметрии детали отнрс 1тел6нр некоторой линии отсчета. Льгчисление координат положения дета ли на робочей поверхности начинается с момента поступления импульса передачи управления из блока 5 формирова ния сигналО1в Перемещения в блок 10 управления. Вычисление интересующих параметров осуществляется путем об, работки изображения контролируемой Детали, сформированного блоком 1 ввода изображения. Чувствитель 1ым элементом блока 1 ввода йзображенйя является:фотоприемная матрица, на матричное фоточувствительное поле которой проецируется с помощью объек тива изображение детали. С наЧа:лом работы устройства блок 10 управления запускает блок 11 формирования прямоугольного растра. Выходные сИгналы блока 11 поступают на вход коммутатора 12 разверток. Под действием сит .Налой, поступающих из блока 10 управ яёййй йа1ихйДда коммутавтора 12развер тОк, выходнйё сигналы блока 11 формирования прямоугольного растра чере коммутатор 12 развертбк ттЬПаютс;ч на вхбй (5лока 1 вводаизображения. На ef tfiSHifti логических йачён иЙ ёдаШ лбё, йоступающих с выхода блока i ввода изображения и с выхода блока 11 формирования прямоугольного раст ра, операционный блок 2 вычисляет значениекоординат центра тяжести . После окончания вычисления крд Шйаты X с выхЬда операционного блока 2 на вход блока 10 управ; зния поступает сигнал, свидетельствующий , 06этоМ, и блок 10 управления через коммутатор 3 команд обеспечивает запись информации о координате X с выхода операционного блока 2 в соответствующую ячейку блока 4 памя;.л. После этого блок Ю управления переключает коммутатор 3 команд и коммуматор 12 разверток в режим определения. Внчис.пёние и запись информации в блок 4 памяти осуществляется аналогично X. После вычисления координат центра тяжести блок 10 управления выдает в блок 5 гЬормирования сигналов перемещения команду на отработку полученной информации.В процессе отF эботки этой информации приводами б исполнительного органа робота схват робота с установленным на нем блоком 1 ввода изображения перемещается в позицию, находящуюсянад центром тяжести детали. В момент окончания отработки информации о центре тяжести, что фиксируется по совпадению информации, заданной на отработку, и информации, полученной с датчиков 7положения исполнительного органа робота, из блока 5 формирования сигналов перемещения в блок 10 управления поступает импульс конца отработки. -. . По этому сигналу блок 10 управления снова выдает команду на вычисление координат центра тяжести де- . тали, Что необходимо для контроля |Совершенного{ движения и повышения помехоустойчивости устройства адаптивного управления. При (; пределении в последующем цикле, вычислений нулевйх значений координат центра тяжести детали срабатывает . нуль-Орган 8. Под действием сигнала с выхода нуль-органа 8 блок 10 управления включит режим определения угла ориенГаЦИй детали. В режиме определения угла ориентации блок 10 управления запускает блок 9 круговой развертки,. Выходные сигналы бцока 9 круговой развертки поступают на входы коммутатора 12 разверток. Управляющие сигналы, поступающие из блока 10 управления в режиме определения угла ориентации детали на вход коммутатора 12 разверток, обеспечивают прохождение сигналов с выхода блока 9 круговой развертки на выход коммутатора 12 разверток. Это обеспечивает формирование дискр ётной круговой развертки вокруг центра тяжести детали. Одновременно на ДРУГОМ выходе блока 9 круг.овой развертки вырабатываются значения угловых расстояний, разделяющих две соседние точки дискретной круговой развертки. На рснрвании логических сйТрЙ Лов с выхода блокс1 1
Ввода изображения, энач.ений угловых расстояний с выхода блока 9 круговой развертки и управляющих сигналов с выходаблока 10 управления операционный блок 2 вычисляет значение угла ориентации детгши, Побле окончания вычислений угла ориентации его значение с выхода операционного блока 2 с помощью коммутатора 3 команд по сигналу из блока 10 управления записывается в определенную ячейку блока 4 памятиt Затем блок 10 управления выдает в бло 5 формирования сигналов перемещения команду на отработку полученной информации. После разворота схвата робота на величину угла ориентации детали на вход блока 10 управления поступает импульс конца отработки из блока 5 формирования сигнгшов перемещения, по которому повторяется цикл вычислений угла ориентации. При получении нулевого значения угл ориентации срабатывает нуль-орган 8 и устройство 10 управления выдает в блок 5 Нормирования сигналов перемещения команду на взятие детали. Установка блока 1 ввода изображения на схвате робота позволяет повысить точность измерения параметров положения и ориентации малых деталей. Это достигается изменением размеров зоны обзора соответственно с рйЭмёрами детали за счет изменения высоты расположения, блока 1 ввода изобржения над рабочей поверхностью Г1ри формировании изображения детали..
Применение изобретения позволит отказаться от необходимости разработки и изготовления дорогостоящих Подающих и ориентирующих приспособлений, исключит необходимость дорабоки технопогического оборудования пр внедрении промышленных роботов в производство, а также обеспечит е5езрпасную эксплуатацию промышленного робота, исключив его соударение с деталями и оборудованием.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее последовательно соединенные блок ввода изображения, установленный на схвате исполнительного органа робота, операционный блок, коммутатор команд, блок памяти, блок формирования сигналов перемещения, приво;й и блок датчиков
положения йсполнитёльного органа робота, выход которого подключен ко второму входу блока формирования сигналов перемещения, второй выход блока Пс1мяти соединен со входом нульоргана, о т л и ч а ю щ ее с я тем, что, с целью расширения функциональных возможностей устройства оно содержит блок круговой развертки.и последовательно соединенные блок управления, блок формирования прямоугольного растра и|коммутатор разверток, выход которогоподключен ко входу блока ввода изображения, а второй вход - к первому выходу блока- круговой развертки, второй выход которого соединен со вторым входом операционного блока, второй выход которого подключен к первому входу блока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход - с выходом нульоргана, второй выход - с третьим входом блока формирования сигналов перемещения, третий выход - со входом коммутатора команд, чет тертый выход - с третьим входом операционного блока, пятый выход -.со входом блока круговой развертки, а шестой выход - стретьимвходом коммутатора разверток.
Источники информации, принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 474435, кл. В 25 J 9/00, 12.04.73.
2. Авторское свидетельство СССР № 470491, кл. В 25 J 3/00, 26.03.74 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888072A1 |
| УСТРОЙСТВО ДЛЯ НОРМАЛИЗАЦИИ ИЗОБРАЖЕНИЙ | 1972 |
|
SU435542A1 |
| Устройство измерения геометрических размеров | 1987 |
|
SU1460614A1 |
| Видеоконтрольное устройство растрового электронного микроскопа с системой развертки изображения | 1984 |
|
SU1218425A1 |
| Кинотелевизионная камера | 1987 |
|
SU1559429A1 |