1
Изобретение относится к роботЬтехнике и может быть использовано для управления адаптивным промышленным роботом при автоматизации производственных процессов.
По основному авт.св. 704775 известно устройство для управления адаптивным роботом, содержгицее последовательно соединенные блок ввода изображения, установленный на охвате исполнительного органа робота, операционный блок, коммутатор команд, блок памяти, блок формирования сигналов перемещения, при,воды к блок датчиков положения исполнительного органа, выход которого, подключен ко второму входу блока формирования сигналов перемещения, второй выход блока памяти соединен со входом нуль-органа, блок круговой развертки и последовательно соединенные , блок управления, блок формирования прямоугольного растра и коммутатор разверток, выход которого подключен ко входу блока ввода изображения, а второй вход - к первому выходу блока круговой развертки, второй выход которого соединен со вторым входом операционного блока, второй выход которого соединен с первым
входом блока управления, второй вход которого соединен со вторым выходом блока- формирования сигналов перемещенкя, третий вход - с выходом нульоргана, второй выход - с третьим входом блока.формирования сигналов перемещения, третий вьЕход - со вторым входом коммутатора команд, четвертый выход - с третьим входом операцион10ного блока, пятый выход - со входом блока круговой развертки, а шестой выход - с третьим входом коммутатора разверток 1 .
Недостатком известного устройства
15 являются узкие функциональные возможности , заключающиеся в отсу -ствии возможности захвата неориентированных деталей в случае, если в зоне обзора робота одновременно находит20ся несколько деталей. Это требует необходимости обеспечения наличия лишь одной детали в зоне обзора, что существенно усложняет вспомогательное оборудование, обслуживающее техноло25гический процесс.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается
30 тем, что устройство содержит сумматор
и последовательно соединенные элемент И, сдвигающий регистр, второй блок памяти и селектЬр-мультиплексер, второй вход которого соединен с пёрвьом выходом коммутатора разверток , а выход - с первым входом операционного блока и четвертым входом блока управления, пятгый вход которого соединен с выходом блока ввода изображения , седьмой выход - со вторым входом второго блока памяти, восьмой выход - с первыгл входом сумматора,девятый выход - со вторым входом сдвигающего регистра, а десятый выход с первыг.1 входом элемента И, второй вход которого подключен к выходу блока ввода изображения, второй вход которого соединен со вторым выходом коммутатора разверток и со вторым входом сумматора, выход которого подключен к третьему входу второго блока памяти, а второй выход блока формирования прямоугольного растр.а соединен с четвертым входЬм операционного блока.
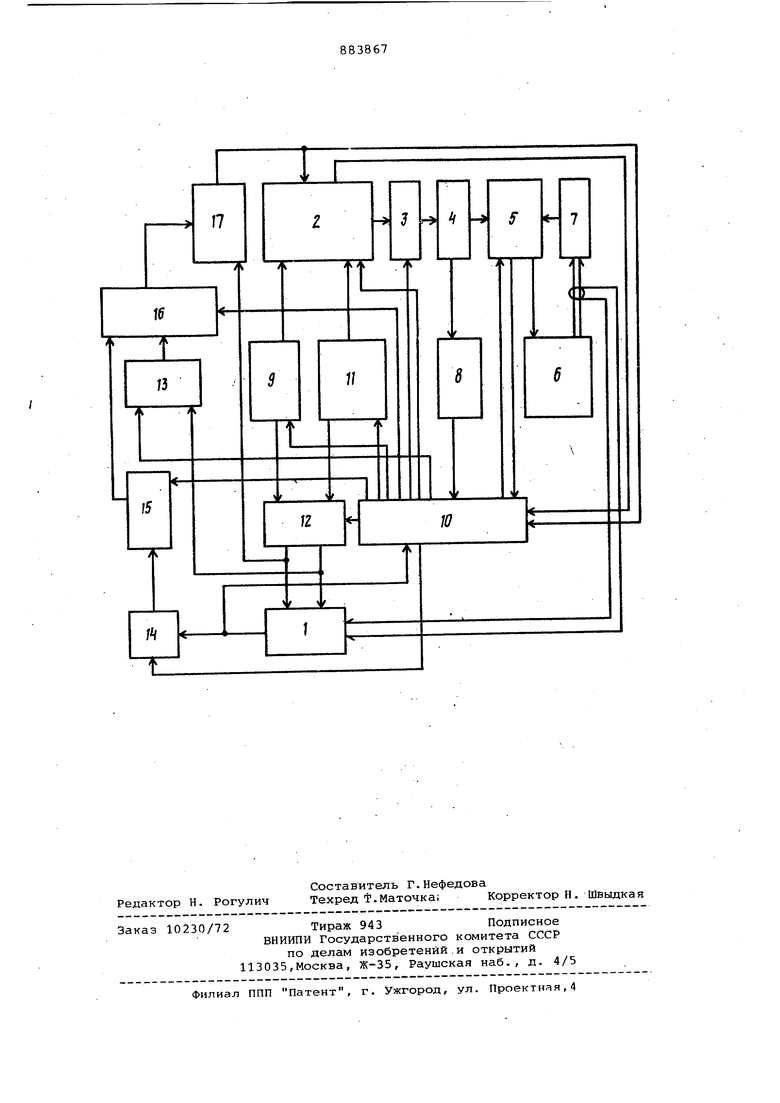
На чертеже представлена функциональная схема устройства.
Устройство содержит блок 1 ввода изображения, операционный блок 2, коммутатор 3 команд, блок 4 памяти, блок 5 формирования сигналов перемещения , приводы 6, блок 7 датчиков положения, нуль-орган 8, блок 9 круговой развертки, блок 10 управления, блок 11 формирования прямоугольного растра, коммутатор 12 разверток,сумматор 13,элемент И 14, сдвигающий регистр 15, второй блок 16 памяти, селектор-мультиплексор 17.
Устройство работает следующим образом.
Положение деталей на рабочей поверхности определяется координатами их центров тяжести Х.Ус и углами ориентации осей симметрии деталей относительно некоторой линии отсчета. Ь некоторый момент времени манипулятор может обеспечивать захват лишь одной детали. В соответствии с этим, для ее захвата устройство обеспечивает вычисление координат центра тяжести и угла ориентации. Для этого необходимо селектировать изображение этой детали из группового изображения деталей. Процесс селекции изображения одной детали, из группового изображения деталей, начинается с момента поступления импульса передачи управления из блока 5 формирования сигналов перемещения в блок 10 управления.
При расположении блока 1 ввода изображения в схвате робота это свидетельствует о выходе схвата в центр заданной зоны обзора. Селекция группового изображения осуществляется путем обработки оптической информации о положении деталей в зоне обзора, формируемой блоком 1.Чувствительным элементом блока 1 является; фотоприемная матрица, на матричное гЬоточувствительное поле которой с помощью объектива проецируется изобра);:ение деталей.
С началом работы устройства блок 10 запускает блок 11 формирования прямоугольного растра. Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток.
Под действием сигнала, поступающего из блока10 на вход коммутатора 12, выходные сигналы блока 11 через коммутатор 12 подаются ,на вход блока 1. Это обеспечивает последовательный построчный выбор элементов информационного поля фотоприемной матрицы для анализа оптической информации, воздействующей на них. Значения оптической информацииi воздействующе на элементы некоторой строки информационного поля матрицы, записываются в сдвигающий регистр 15. Если кадр изображения имеет m х п элементов разложения, где m - количество строк разложения, an- количество элементов разложения в строке, то сдвигающий регистр имеет емкость в п разрядов.
В конце каждой текущей строки информационного поля матрицы оптическая информация, накопленная в сдвигающем регистре 15, переписывается в предкщущую строку информационного поля второго блока 16 памяти , емкость KOToijoro составляет m х- п бит. Запись информации в предьщущую строку информационного поля второго блока 16 памяти обеспечивается с помощью сумматора 13, осуществляющего в процессе селекции вычитание единицы из .кода, поступающего с выхода коммутатора 12 разверток на вход блока 1.
Последовательный ввод нулевой оптической информации в сдвигающий регистр 15 в процессе анализа кадра изображения осуществляется до лоявления первого видеосигнала, равного логической единице, что соответствует появлению некоторой детали по.текущей строке информационного поля фотоприемной матрицу. После этого осуществляется формирование изображения этой детали на данной строке. Блок 10 управления выделяет момент окончания изображения деагали по строке и вырабатывает сигналj запирающий элемент И 14, до окончания текущей строки сканирования.ЭТО обеспечивает запись в сдвигающий регистр 15 значений оптической информации, равным логическому нулю, .независимо от наличия других деталей на этой строке. При анализе следующей строки информационного поля матрицы блок 10 открывает элемент И 14. Аналогично рассмотренному,обеспе чивается прием логических.значений оптической информации на этой строк в сдвигающий регистр 15. При этом в блоке 10 осутдествляется сравнение логичес их значений оптической информа.ции, воздействовавших на соответствунндие элементы предьщущей строки информационного поля матрицы поступающих с информационного поля второго блока 16 с логическими значениями оптической информации,воздействугадих на соответствующие элем ты текущей строки информационного поля матрицы. Последовательная соот ветствующая выборка квантованного видеосигнала из второго блока 16 па мяти осуществляется с помощью селектора-мультиплексора 17, управляемого параллельно с блоком 1 кодами поступающими с выхода коммутатора 1 разверток и определяющими выбор эле мента на строке информационного пол матрицы. Изображение детали на предыдущей строке информационного поля матрицы извлекаемое из второго блока 16 памяти устанавливает границы изображе ния детали, селекция изображения которой уже начата. Таким образом,в результате сравнения видеосигналов из второго блока 16 памяти и блока ввода изображения определяется принадлежностью некоторого изображения на текущей строке, к изображению селектируемой детали. Если изображения каких-то деталей на текуюей строке информационного поля матрицы не попадают в границы, установленные по предьщущей строке, то это изображение не является изображением селектируемой детали и по его окончанию блок 10 управления осуществляет сброс сдвигающего регистра 15. Если же изображение детали-, формируемое блоком 1 на текущей стро ке, находится в пределах установленных границ, то после его окончания на данной строке блок 10 управления закрывает элемент И 14, что соответствует заполнению до конца строки нулевой видеоинформацией сдвигающего регистра 15. Таким образом, изображение селектируемой детали на этой строке информационного поля матрицы остается в сдвигаивдем регистре 15, и аналогйч но описанному, в конце строки переписывается во второй блок 16 памяти Если одно из изображений деталей на текущей строке информационного поля матрицы не попадает в установленные границы, то это означает, что селекция изображения данной детали закончена и блок 10 управления запирает элемент И 14 до конца кадра сканирования, что соответствует дальнейшему заполнению второго блока 16 памяти логическими значениями оптической информации, соответствукяцими отсутствию изображения деталей. По окончании кадра сканирования во втором блоке 16 хранится селектированное изображение одной детали, путем обработки которого устройство вычисляет координаты центра тяжести и угол ориентации оси симметрии этой детали. Для этого по окончании процесса селекции изображения одной детали блок 10 управления переводит устройство в режим вычисления координат центра тяжести детали. При этом сигналом с выхода блока 10 блокируется запись информации во второй блок 16 и вычитание единицы, выполняемое сумматором 13 в режиме селекции. Это обеспечивает сохранность селектированного изображения детали во втором блоке 16 памяти и синхронный выбор его элементов в процессе вычисления координат центра тяжести детали. Процесс вычисления координат центра тяжести селектированной детали начинаетст по сигналу, которым блок 10 запускает блок 11 формирования прямоугольного растра. Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток. Под действием сигналов, поступающих из блока .10 на входы коммутатора 12 выходные сигналы блока 11 через коммутатор 12 подаются через сумматор 13, осуществляющий в этом режиме вычитание нуля из поступающего кода, на адресные шины второго блока 16 памяти и на адресные шины селектор.-:-мультиплексора 17. На основании логических значений сигналов поступающих через селектормультиплексор 17 с выхода второго блока 16 памяти и с выхода блока 11, операционный, блок 2 вычисляет значение координат центра тяжести селектированной детали. По окончании вычисления координаты Xg с выхода операционного блока 2на вход блока 10 управления поступает сигнал, свидетельствующий об этом, и блок 10 через коммутатор 3команд обеспечивает запись информации о координате селектированной детали с выхода операционного блока 2 в соответствующую ячейку блока 4 памяти. После этого блок 1-0 переключает коммутатор 3 команд и коммутатор 12 разверток в режим определения УС Вычисление и запись, информации об УС в блок 4 памяти осуществляется аналогично Хс . После вычисления координат центра тяжести блок правления 10 вьщает в блок формиования сигналов перемещения 5 коанду на отработку полученной инфорации. В процессе отработки этой инфорации схват робота с установленным
на нем блоком 1 перемещается в позицию, находящуюся над центром тяжести детали. В момент окончания отработки информации о центре тяжести селектированной детали, что фиксируется по совпадению информации, выданной на отработку информации, полученной с датчиков 7 положения исполнительного органа робота, из блока 5 формирования сигналов перемещения в блок 10 поступает импульс конца отработки
1 с
По этому сигналу блок 10 снова выдает команду на селекцию изображения одной.детали. Процесс селекции изображения происходит аналогично описанному. По окончании селекции блок 10 переводит устройство в режим вычисления координат центра тяжести селектированной детали, что необходимо для контроля соверйенного движения и повышения помехоустойчивости устройства адаптивного управления. При определении в последующем цикле вычислений нулевых значений координат центра тяжести срабатывает нуль-орган 8. Под воздействием сигнала с выхода нуль-органа 8 блок 10 включает устройство в режим определения угла ориентации детали.
В режиме определения угла ориентации блок 10 запускает блок 9 круговой развертки. Выходные сигналы с блока 9 поступают на входы коммутатора 12 разверток. Управляющие сигналы, поступающие из блока 10 в режиме определения угла ориентации на вход коммутатора 12 разветок , обеспечивают прохождение сигналов с первой группы выходов блока 9 на выход коммутатора 12. Одновременно на второй группе выходов блока 9 вырабатываются значения угловых расстояний, разделяющих две соседние точки круговой развертки.
На основании логических значений сигналов с выхода второго блока 16 памяти, поступающих через селектормультиплексор 17 , значений углов расстояний, с выхода блока 9 и управляющих сигналов с выхода блока 10, операционный блок 2 вычисляет значение угла ориентации селектированной детали.
После окончания вычислений угла ориентации его значение с выхода операционного блока 2 с помощью коммутатора 3 команд по.сигналу из блока 10 записывается в определенную ячейку блока 4 памяти. Затем блок 10 выдает в блок 5 команду на отработку полученной информации.
После разворота охвата робота на величину угла ориентации селектированной детали, схват его находится над центром тяжести этой детали с ориентацией, соответствующей ориентации детали. Поэтому по сигналу окончания отработки вычисленного значения угла ориентации селектированной детали выдается команда на захват детали.
Таким образом, использование предлагаемого изобретения позволяет осуществлять последовательный захват нескольких деталей, одновременно находящихся в зоне обзора адаптивного промышленного робота, что существенно расширяет функциональные возможности устройства, повышает степень адаптируемости робота к обстановке в рабочей зоне и упрощает вспомогательное оборудование, обслуживающее технологический процесс.
Формула изобретения
Устройство для управления адаптиным роботом по авт.св. № 704775, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит сумматор и последовательно соединенные элемент И, сдвигающий регистр, второй блок памяти и селектор-мультиплексор, второй вход которого соединен с первым выходом коммутатора разверток, а выход с первым входом операционного блока и четвертым входом блока управления, пятый вход которого соединен с выходомблока ввода изображения, седьмой выход - со вторым входом втрого блока памяти, восьмой выход с первым входом сумматора, девятый выход - со вторым в-ходом сдвигающего регистра, а десятый выход - с первым входом элемента И, второй вход которого подключен к выходу блка .ввода изображения, второй вход которого соединен со вторым выходом ког.1Мутатора разверток и вторым входом сумматора, вьдход которого подключен к третьему входу второго блока памяти, а второй выход блока формиров.ания прямоугольного растра соединен с четвертым входом операционного блока.
Источники информации, f принятые во внимание при экспертизе
1. Авторское свидетельство СССР по заявке 2528924/18-24, кл. G 05 В 19/00, В 25 J 9/00,1977 (прототип)-.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| УСТРОЙСТВО ОБРАБОТКИ ДВУХМЕРНЫХ И ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 2005 |
|
RU2289161C1 |
| Устройство для селекции изображений объектов | 1989 |
|
SU1777651A3 |
| УСТРОЙСТВО ДЛЯ СЕЛЕКЦИИ ИЗОБРАЖЕНИЙ ОБЪЕКТОВ | 1990 |
|
RU2032218C1 |
| ТЕЛЕВИЗИОННОЕ УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ОБЪЕКТОВ И ОПРЕДЕЛЕНИЯ ИХ КООРДИНАТ | 1984 |
|
SU1250151A1 |