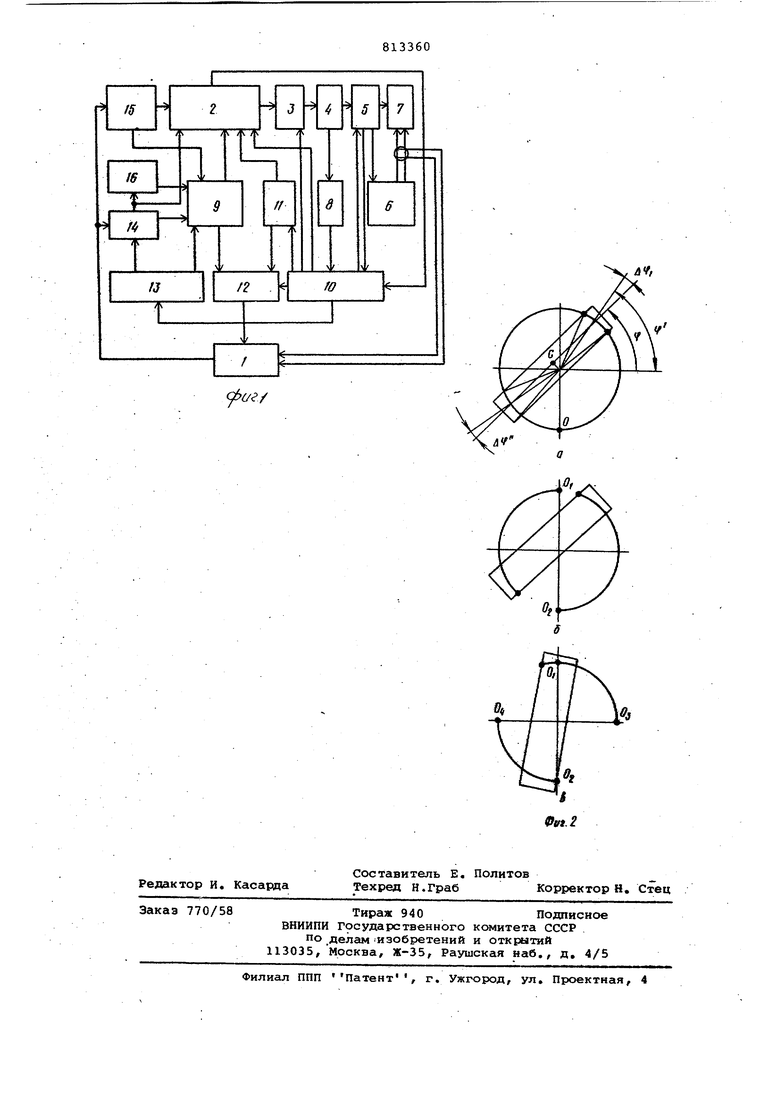
Изобретение относится к работотехнике и может быть использовано для управления адаптивным роботом при автоматизации производственных процессов. Известно устройство для управлен адаптивным роботом, содержащее блок ввода изображения, операционный бло коммутатор команд, блок памяти, бло формирования сигналов перемещения, нуль-орган, приводы и датчики испол нительного органа робота 1, Однако это устройство имеет низк точность вычисления угла ориентации Наиболее близким по технической сущности и достигаемому результату к предлагаемому является устройство содержащее блок ввода изображения, установленный на схвате исполнитель ного органа робота-, последовательно соединенные операционный блок, коммутатор команд, блок памяти, блок ф01л 1ирования сигналов перемещения, приводы и датчики положения исполнительного органа робота, выход которого подключен К.О второму выходу 6jiOKa формирования сигналов перемещения , второй выход блока памяти соединен со входом нулъ-органа, бло круговой развертки и последовательно соединенные блок управления, блок/ формирования прямоугольного растра, второй выход которого соединен с первым входом операционного блока и коммутатор разверток, выход которого подключен к входу блока ввода изображения, а второй вход - к первому выходу блока круговой развертки, второй выход которого соединен со вторым входом операционного блока, второй выход которого подключен к первому входу блока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход - с выходом нуль-органа, второй выход с третьим входом блока формирования сигналов перемещения, третий выход со вторым входом коммутатора команд, четвертый выход - с третьим входом операционного блока, а пятый выход с третьим входом коммутатора разверTdK 2. Недостатком такого устройства, является низкая точность измерения угла ориентации детали, что не позволяет использовать его для выполнения точных операций. Цель изобретения - повышение точности устройства. Поставленная цель достигается те что устройство содержит блок выделения границ объекта и последовательно соединенные распределитель импульсов, блок анализа положения объекта и блок выбора начальных точек круговой развертки, выход которого подключен к первому входу блока круговой развертки, второй вход которого соединен с первым выходом блока выделения границ объакта, в.торой выход которого подключен к четвертому входу операционного блока, а вход - к выходу блока ввода изображения и входу блока, ана .лиза положения объекта, первый выход которого соединен с пятым входом операционного блока, а второй выход - с третьим входом блока круговой развертки, четвертый вход которого подключен ко второму выходу распределителя импульсов, входом соединенного с шестым выходом блока управления. На фиг, 1 представлена функциональная схема устройства; на фиг„2 примеры расположения объектов. Устройство содержит блок 1 виода изображения, операцконный блок 2, коммутатор 3 команд, блок 4 памяти блок 5 формирования сигналов перемещения, приводы б. датчик 7 положения исполнительного оргалча робота нуль-орган 8, блок 9 круговой развертки , блок 10 управления, блок 1 формирования прямоугольного растра коммутсггор 12 разверток, определитель 13 импульсов, блок 14 анализа положения объекта, блок 15 вь деления границ объекта, блок 16 выбора начальных точек круговой развертки Положение детали на рабочей поверхности определяется координатам ее центра тяжести Х, У,- и углом ориентации оси симг/1етрии детали от носительно некоторой линии отсчета Вычисление координат положения дет ли на рабочей поверхности начинает с момента поступления импульса пер дачи управления из блока 5 формиро вания сигналов перемещения в блок управления. При расположении блока Ввода изображения в -схвате робота свидетельствует о выходе схвата в центр заданной зоны обзора. Вычисление интересующих параметров осуществляется .путем обработки оптиче кой информации о положении детали зоне обзора, формируемой блоком 1 ввода изображения, Чувствительньлм элементом блока 1 ввода изображени является фотоприемная матрица, на тричное фоточувствительное поле ко торой с помощью объектива проектируется изображение детали. Устройство работает следующим образом, Блок 10 управления запускаетблок 11 формирования прямоугольного растра, Выходные сигналы блока 11 поступают на вход коммутатора 12 разверток. Под действием сигнала, поступающего из блока 10 управления на вход коммутатора 12 разверток, выходные сигналы блока 11 формирования прямоу- гольного растра через коммутатор 12 разверток подаются на вход блока 1 ввода изобрежения. На выходе блока 1 ввода изображения появляется сигнал, логическое значение которого соответствует оптической информации, воздействующей на выбранный элемент информационного поля фотоприемной матрицы. На основании логических значений сигналов, поступающих с выхода блока ввода изображения через блок 15 выделения границ и с выхода блока 11 формирования прямоугольного растра, операционный блок 2 вычисляет значение координаты Xj,центра тяжести детали. После окончания вычисления координаты X (.- с выхода операционного блока 2 на вход блока 10 управления поступает сигнал, свидетельствуйщий об этом, и блок -10 управления через коммутатор 3 команд обеспечивает запись информации о координате Х,- с выхода операционного блока 2 в соответствующую ячейку блока 4 памяти, После этого блок 10 управления переключает коммутатор 3 команд и коммутатор 12 разверток в режим определения координаты У(, , Вычисление и запись информации у в блок 4 памяти осутдествляются, аналогично Х. После вычисления координат центра тяжести блок 10 управления зьщает в блок 5 формирования сигналов перемещения команду на отработку полученной информации. В процессе отработки ЭТОЙ информации приводами 6 исполнительного органа робота схват робота с установленным на нем блоком 1 ввода изображения перемещается в позицию, находящуюся над центром тяжести детали, В момент окончания отработки информации о центре тяжести, что фиксируется по совпадению информации, заданной на отработку, и информации, полученной с датчиков 7 положения исполнительного органа робота, из блока 5 формирования сигналов перемещения в блок 10 управления поступает импульс конца отработки, По этому сигналу блок 10 управления снова выдает команду на вычисление координат центра тяжести детали, что необходимо для контроля совершенного движения и повышения помехоустойчивости устройства адаптивного управления. При определении в последующем цикле вычислений нулевых значений координат цейтра тяжести срабатывает нуль-орган 8, Под действием сигнала с выхода нуль-органа 8 блок 10 управления включает -режим определения угла ориентации детали. Точность вычисления угла ориентации детали с использованием круговой развертки существенно зависит от положения детали относительно центра развертки и ее начальной точ ки. Минимальная погрешность вычислен угла ориентации обеспечивается при совпадении центра круговой развертк с центром тяжести детали и несовпад нии начальной точки круговой развер тки с изображением детали. Очевидно что выполнение указанных условий в общем случае для устройств управлен адаптивными роботами невыполнимо вследствие имеющихся погрешностей вывода центра информационного поля фотоприемной матрицы (центра схвата над центром тяжести детали. При наличии смещения центра круговой развертки относительно центра тяжести детали вычисляется угол ориентации , отличающийся от искомого угла ориентации V на величину погрешности лм (Фиг,. 2а) H f-AM дЧ-агс51ч-р где С - смещение центра круговой развертки от центра тяжести .детали; R - радиус круговой развертки. Для минимизации погрешности вычис ления угла ориентации детали при сме щении ее центра тяжести относительно центра развертки необходимо вычислять угол ориентации по обоим сечени ям изображения детали круговой разйерткой. В этом случае погрешности и uf измерения угла при обработке каждого сечения будут равны по величине и противоположны по знаку, что компенсирует общую погрешность вычисления угла ориентации (фиг. 2а). Простейшая техническая реализация устройства обеспечивается при замене полной круговой развертки ее дугами, формируемыми в угловых интервалах, заключенных между начальными радиусами и радиусами, проходящими чер.ез точки выхода круговой развертки из изображения детгши (фиг. 26). В этом случае, для компенсации погрешности вычисления угла ориентации за счет принадлежности начальных точек круговой развертки изображению детали необ ходимо перед началом вычисления угла анализировать положение детали. Если положение детали таково, что начальные точки 0 и принадлежат изображению детали, то они и выбираются в качестве начальных точе1 дуг круговой развертки (фиг. 2б). Если же положение детали таково, что хотя бы одна точка 0 или Q, принадлежит изображению детали, то в качестве начальных точек дуг круговой развертки выбираются точки 0 и Од. (фиг. 2в) . При выборе в качестве начальных-точек 0 и Оц для получения правильного результата необходимо скорректировать вычисленное значение угла ориентации на угол 57/ . После включения режима определения ,угла ориентации осуществляется анализ положения детали. Для этого управляющие сигналы, поступающие из блока 10 управления в режиме определения угла ориентации на вход коммутатора 12 разверток, обеспечивают прохождение сигналов с выхода блока 9 круговой развертки на вход блока 1 ввода изображения. В исходном состоянии на выходе блока 9 круговой развертки присутствуют координаты точки 0 , что обеспечивает ее выбор-для анализа. Если логическое значение оптической информации в точке 0., соответствует логическому нулю, т.е. отсутствию изображения детали, то в следующем такте анализа по команде из распределителя 13 импульсов из блока 14 анализа положения детали ,в блок 9 круговой развертки переписывается адрес точки 0,2 , что обеспечивает ее выбор для анализа. Если логическое значение оптической информации и в точке 0. равно логическому нулю, то по команде из распределителя 13 импульсов блок 9 круговой развертки начинает формирование дискретной круговой развертки вокруг, центра тяжести детали, начиная с точки Оа . ЕСЛИ же логическое значение оптической информации в точках 0 или 0л равно логической единице, то блок 14 анализа положения детали выдает сигнал, по которому в блоке 16 выбора начальных точек круго.вой развертки формируются адреса начальных точек Oj и Од. , а в операционном блоке 2 запоминается необходимость коррекции вычисленного значения угла ориентации. После этого по команде из распределителя 13 импульсов в блок 9 круговой развертки из блока 16 выбора начальных точек круговой развертки переписывается адрес точтки Oj и, начиная с нее, осуществляется формирование круговой развертки. Одновременно с Формированием круговой развертки на выходе блока 9 круговой развертки вырабатывается значение УГЛОВЫХ расстояний, разделяювдх две соседние точки дискретной крьтовой развертки. На основании значений угловых расстояний управяющих сигналов с выхода блока 10 управления и логических значений игналов с выхода блока.. 1 ввода изображения, поступающих через блок 15 ыделения границ, операционный блок 2 вычи.сляет значение угла ориентации. В момент выхода развертки из изобра жения детали блок 15 выделения границ вырабатывает сигнал, по котором из блока 16 выбора начальных .точек круговой развертки переписьшается адрес второй начальной точки, (О-, ил 0 ) и продолжается вычисление угла ориентации. Вычисление угла заканчивается в момент выхода круговой развертки из изображения детали вто рой раз. В этот момент блок 15 выде ления границ вырабатывает сигнал, п которому осуществляется коррекция результата. После окончания вычисле ния угла ориентации его значение с выхода операционного блока 2 с помощью коммутатора 3 команд по сигна лу из блока 10 управления записывается в определенную ячейку блока 4 памяти. Затем блок 10 управления выдает в блок 5 формирования сигналов перемещения команду на обработк полученной информации . После разворота схвата робота на величину угла ориентации детали на вход блока 10 управления из блока 5 формирования сигналов перемещения поступает импульс конца отработки, по которому повторяется цикл вычислений угла ор ентации. При получении нулевого зна чения угла ориентации срабатывает нуль-орган 8 и блок 10 управления выдает в блок 5 формирования сигналов перемещения команду на взятие детали. Применение изобретения позволяет существенно повысить точность измер ния угла ориентации детали, что обе печивает выполнение роботом точных операций. Формула изобретения Устройство для управления адаптивным роботом, содержащее блок вво да изображения, установленный на схвате исполнительного органа робот последо1вательно соединенные операционный блок, коммутатор команд, бл памяти, блок формирования сигналов перемещения, приводы и датчик положения исполнительного органа робот выход которого подключен ко втором входу блока формирования сигналов перемещения, второй выходблока пам ти соединен со входом нуль-органа, а также блок круговой развертки и последовательно соединенные блок управления, блок формирования прямоугольного растра, второй выход которого соединен с первым входом операционного блока и коммутатор разверток, выход которого подключен к входу блока ввода изображения, а второй вход - к первому выходу блока круговой развертки, второй выход которого соединен со вторым входом операционного блока, -вторым выходом подключенного к первому входу блока управления, второй вход которого соединен со вторым выходом блока формирования сигналов перемещения, третий вход с выходом нуль-органа, второй выход с третьим входом блока формирования сигналов перемещения, третий выход со вторым входом коммутатора команд, четвертый выход - с третьим входом операционного блока, а пятый выход с.третьим входом коммутатора разверток , отличающееся тем, что, с целью повышения точности устройства, оно содержит блок выделения границ объекта и последовательно соединенные .распределитель импульсов, блок анализа положения объекта и блок выбора начальных точек круговой развертки, выход которого подключен к первому входу блока круговой развертки, второй вход которого соединен с первым выходом блока выделения границ объекта, второй выход которого подключен к четвертому входу операционного блока, а вход - к выходу изображения и входу блока анализа положения объекта, первый выход которого соединен с пятым входом операционного блока, а второй выход - с третьим входом блока круговой развертки, четвертый вход которого подключен ко второму выходу распределителя импульсов, входом соеди-. ненного с шестым выходом блока.управления . Источники информации, принятые во. внимание при. экспертизе 1.Авторское свидетельство СССР № 470791, кл. G 05 В 15/00, 1974, 2.Авторское свидетельство СССР по заявке № 2528924/18-24, кл. в 25 J 9/00, 1977.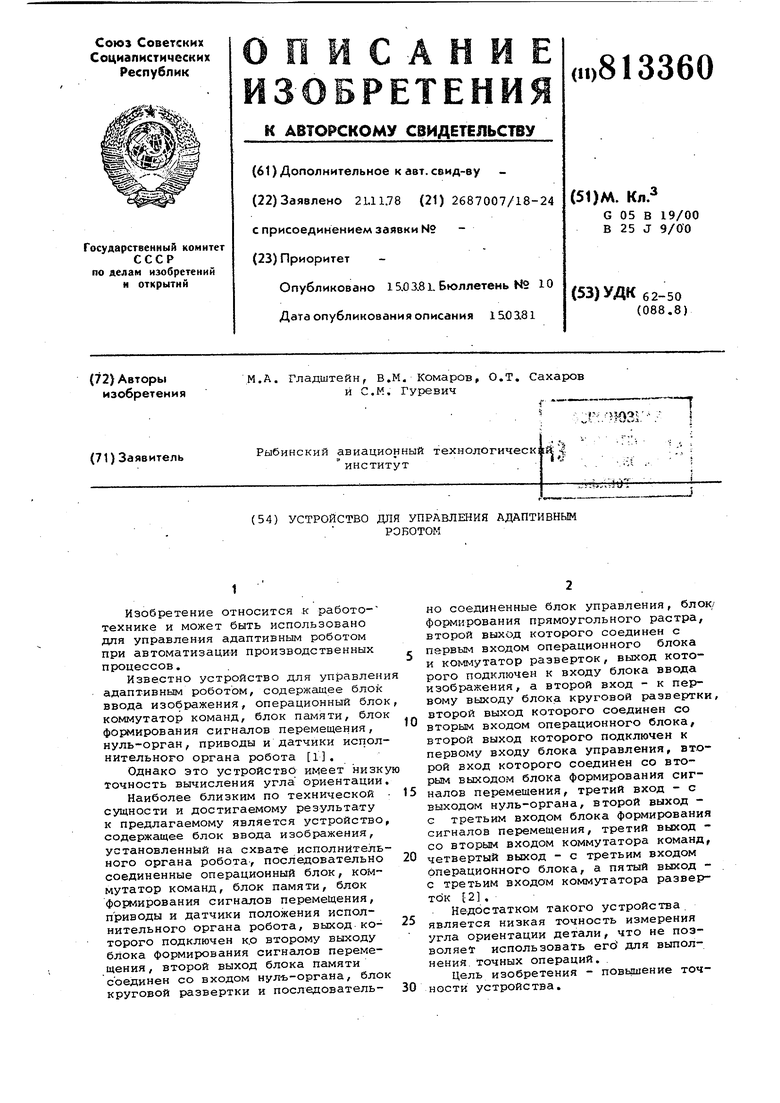
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888072A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| Устройство для супервизорного управления роботом | 1976 |
|
SU682330A1 |
| Устройство отображения видеоинформации в радиолокационных системах | 1988 |
|
SU1628223A1 |
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |