1
Р1зобретение относится к области робототехники и может быть иснользовано для управления адаптивным роботом при автоматизации производственных процессов.
Известны устройства для управления адаптивным роботом. Устройство 1, содержаш,ее блок ввода изображения, операционный блок, коммутатор команд, блок памяти, нуль-орган, блок формирования перемещения, приводы и датчики перемещеПИЯ исполнительного органа, имеет низкое быстродействие.
Наиболее близким техническим решением к изобретению является устройство .2, содержащее последовательно соединенные функциональный преобразователь, коммутатор команд, блок памяти, блок формирования сигналов перемещения, блок управления, блок круговой развертки, коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, а также блок формирования нрямоугольного растра, вход которого подключен к первому выходу блока управления, первый выход - ко второму входу коммутатора разверток, а второй выход - к первому входу функционального преобразователя, второй вход которого соединен со вторым выходом блока круговой развертки, третий вход и второй выход - со вторыми выходом и входом блока управления соответственно, третий вход которого через нуль-орган подключен ко второму выходу блока памяти, третий выход - к третьему входу коммутатора разверток, четвертый выход- ко второму входу коммутатора команд, а пятый выход - ко второму входу блока формирования снгиалов перемещения, вторые выходы которого соединены со входамн приводов, связанных с датчиками положеппя исполнительного органа, выходы которых подключены к третьпм входам блока формпроваипя сигналов перемещения.
Низкое быстродействне такого устройства обусловлепо скапированием полной поверхностн ниформационного поля независимо от положения детали. Это приводит к непроизводительным затратам времени при вычпслеипн коордпнат центра тяжести и угла ориентацин деталн, что повышает требования к параметрам системы импульсного освещения и приводит к ее усложнению.
Целью изобретения является новыщение быстродействпя устройства.
Сущиость изобретения заключается в том, что устройство содержит первый и второй элементы 11 и последовательно соединенные трнггер и блок вычисления контура объекта, второй вход которого подключен к первому входу первого и второго элементов
И и ujecTOMv выходу блока управления, первый выход - к четвертому входу функцпонального преобразователя, а второй выход - к четвертому входу блока управления, седьмой выход которого соединен с первым входом триггера, второй вход которого подключен к выходу блока ввода изображения, первый выхо.д - ко второму входу первого элемента И, а второй выход - ко второму входу второго элемента И. Выходы первого и второго элементов И соединены соответственно со вторым и третьим входами блока формирования прямоугольного растра.
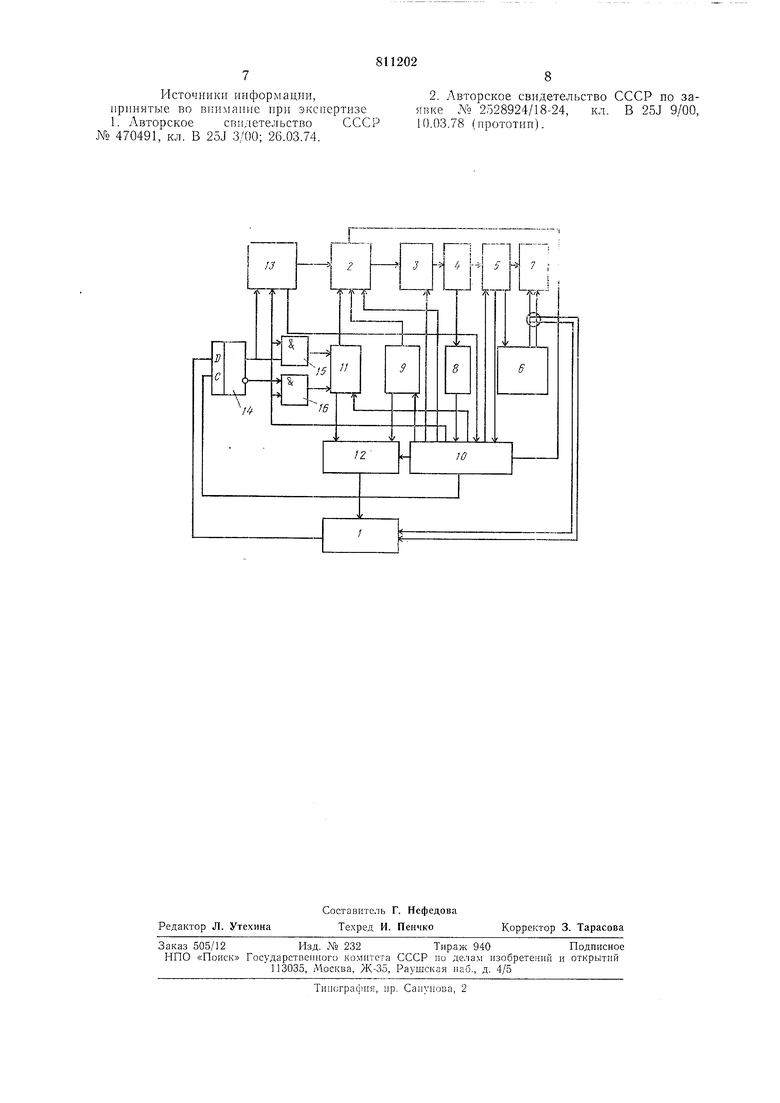
На чертеже представлена функциональная схема устройства. Оно содержит блок ввода изображения 1, функциональный преобразователь 2, коммутатор команд 3, блок памяти 4, блок формирования сигналов перемещения 5, приводы 6, датчики положения 7 иснолпительпого органа, нуль-орган 8, блок круговой развертки 9, блок управления 10, блок 11 формирования прямоугольного растра-, коммутатор комап/т, 12, блок 13 вычисления контура объекта, триггер 14, первый 15 и второй 16 элементы И.
Устройство работает следующим образом.
Положение объекта на рабочей поверхности определяется координатами его центра тяжести Хс, УС и углом ориентации оси симметрии объекта относительно некоторой линии отсчета. Вычисление координат положения детали на рабочей поверхиости начинается с момента поступления пмпульса передачи управления из блока формирования сигналов перемещения 5 в блок управления 10. При расиоложении блока ввода изображения 1 в схвате робота это свидетельствует о выходе схвата в центр заданной зоны обзора. Вычисление интересующих параметров осуществляется путем обработки оптической информации о положении объекта в зоне обзора, формируемой блоком ввода изображения 1. Чувствительным элементом блока ввода изображения 1 является фотоприемная матрица, на матричное фоточувствительное поле которой с иомощью объектива проецируется изображение объекта.
С началом работы устройства блок управления запускает блок формирования прямоугольного растра 11. Выходные сигналы блока 11 поступают на вход коммутатора разверток 12. Под действием сигнала, поступающего из блока управления 10 на вход коммутатора разверток 12, выходные сигналы блока 11 через коммутатор разверток 12 подаются на вход блока ввода изображения 1. На выходе блока 1 появляется сигнал, логическое значение которого соответствует оптической информации, воздействующей иа выбранный элемент информационного ноля фотоириемной матрицы. Логическое значение оптической информации
с выхода блока 1 под действием сигнала блока управления 10 в конце каждого такта записывается в триггер 14, состояние которого анализируется в начале каждого последующего такта. Если состояние триггера 14, выполненного по схеме триггера, соответствует логическому «О, т. е. отсутствию изображения объекта, то в следующем такте осуществляется переход к очередной точке информационного поля фотоприемной матрицы. Это происходит под воздействием сигнала с выхода элемента И 16 па вход безусловного перехода блока И. Если же состояние триггера 14 соответствзет логической «1, т. е. налпчию изображения объекта, то в следующем такте сканирование данного столбца (при вычислении Ас) прекращается и осуществляется переход к нача.чьпому элементу очередного
столбца информационного поля матрицы. Это происходит под воздействием сигнала с выхода элеме гга PI 15 на вход условного перехода блока 11. На основании логических зиачений сигна.юв, поступающих с выхода триггера 14 через блок выделения границы изображения детали 13 и с выхода блока И, (функциональный преобразователь 2 вычисляет значение координаты Ас центра тяжести. Блок 13, анализируя изображение объекта, вырабатывает сигнал, поступающий в блок управления 10 в мо.мент обнаружения задней граппцы пзображепия объекта. По этому сигналу блок управления 10 переключает блок II в режим вычисления координаты УС центра тяжести объекта. Таким оразом, при вычислении координат центра тяжести обеспечивается аиализ лищь необходимых для этого элемептов информационного поля.
Пскл очение интервала времени, необходимого для анализа избыточных элементов информационного по;1Я, значительпо сокращает время вычисления координат, причем сокрап ение затрат вре.мсни тем значительнее, чем ближе к началу координат расположен объект. По окончании вычисления координаты АС с выхода иреобразователя 2 па вход блока управления 10 поступает сигпал, свидетельствующий об этом, и блок
управления 10 через коммутатор команд 3 обеспечивает запись информацци о координате АС с выхода преобразователя 2 в соответствующую ячейку блока памяти 4. После этого блок управления 10 переключает коммутатор команд и коммутатор разверток 12 в режим определения УС. Вычисление и запись информации УС в блок памяти 4 осуществляется аналогично вычислению Хс. После вычисления координат
центра тяжести блок управления 10 выдает в блок формирования сигналов перемещения 5 команду на отработку полученной информации. В процессе отработки этой информации прпводами 6 исполнительного
органа робота схват робота с установленыым на нем 6v40KOM 1 перемещается в позицию, находящуюся над центром тяжести объекта. В момент окончания отработки информации о центре тяжести, что фиксируется но совпадению информации, заданной на отработку, и информации,,полученной с датчиков положения 7 исполнительного органа робота, из блока 5 в блок управления 10 поступает импульс конца отработки. По этому сигналу блок управления 10 снова выдает команду на вычисление координат центра тяжести детали, что необходимо для контроля совершенного движения и повышения помехоустойчивости устройства адаптивного управления. При определении в последующем цикле вычислений нулевых координат центра тяжести срабатывает нуль-орган 8. Под действием сигнала с выхода нуль-органа 8 блок управления 10 включает режим определения угла ориентации объекта.
В режиме определения угла ориентацпи блок управления 10 запускает блок круговой разверткп 9. Выходпые сигналы блока 9 поступают на входы коммутатора разверток 12. Управляющие сигналы, поступающие из блока управления 10 в режиме определения угла ориентации объекта на вход коммутатора разверток 12, обеспечивают прохождение сигналов с выхода блока
9на выход коммутатора разверток 12. Это обеспечивает формирование дискретной круговой развертки вокруг центра тяжести объекта. Одновременно на другом выходе блока 9 вырабатываются значения угловых расстояний, разделяющих две соседние точки дискретной круговой разверткп. Па основании логических значений сигналов, поступающих через триггер 14 и блок вычислепия контура объекта 13 с выхода блока 1, значений угловых расстояний с выхода блока 9 и управляющих сигналов с выхода блока управления 10 операционный блок вычисляет значение угла ориентации. В момент окончания изображения объекта в направлении круговой развертки блок 13 формирует сигнал, поступающий в блок управления 10. По сигналу из блока управления
10вычисленное значение угла ориентации с выхода преобразователя 2 с помощью коммутатора команд 3 записывается в определенную ячейку блока памяти 4. Таким образом, при вычислении угла ориентации обеспечивается апализ лишь необходимых для этого элементов информационного поля, что также сокращает время вычисления угла ориентации.
После вычисления угла ориентации блок управления 10 выдает формирования сигналов перемещения 5 команду на отработку полученной информации. После разворота схвата робота на величину угла ориентации детали на вход блока управления 10 из блока 5 поступает импульс конца отработки, по которому повторяется цикл вычислений угла орпситацпн. Прп получении нулевого значения угла ориентацпи
срабатывает нуль-орган 8 и блок управления 10 выдает в блок 5 команду па взятие объекта.
Применение изобретения позволит значительно сократить затраты времени, необходпмые для вычисления координат центра и угла ориентации объекта.
Формула изобретения
Устройство для управления адаптивным роботом, содержащее последовательно соединенные функциональный преобразователь, коммутатор команд, блок памяти,
блок формирования сигналов перемен ения, блок управления, блок круговой развертки, коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, а также блок формироваПИЯ фямоугольного растра, вход которого подключен к первому выходу блока управленпя, первый выход - ко второму входу коммутатора разверток, а второй выход - к первому входу функцпонального преобразователя, второй вход которого соединен со вторым выходом блока круговой развертки, третий вход и второй выход - со вторымп выходом и входом блока управления соответственно, третий вход которого через
нуль-орган подключен ко второму выходу блока памятп, третий выход - к третьему входу коммутатора разверток, четвертый выход - ко второму входу коммутатора команд, а пятый выход - ко второму входу
блока формирования сигналов перемещения, вторые выходы которого соединены со входами приводов, связанных с датчиками положения исполнительного органа, выходы которых подключены к третьим входам
блока формирования сигналов перемепд,ения, отличающееся тем, что, с целью повышеппя быстродействия устройства, оно содержит первый и второй элементы П и последовательно соедппенные трпггер п
блок вычпслеппя контура объекта, второй вход которого подключен к первому входу первого п второго элементов li и шестому выходу блока управления, первый выход - к четвертому входу функционального преобразователя, а второй выход - к четвертому входу блока управленпя, седьмой выход которого соединен с первым входом триггера, второй вход которого подключен к выходу блока ввода изображения, первый выход - ко второму входу первого элемента И, а второй выход - ко второму входу второго элемента И, выходы первого и второго элементов П соедииены соответственно со вторым и третьим входами блока формировання прямоугольного растра.
РТсточникн информации, принятые во внимание прн экспертизе 1. Авторское свидетельство СССР jYo 470491, кл. В 25J 3/00; 26.03.74.
2. Авторское свидетельство СССР по заявке NO 2528924/18-24, кл. В 25J 9/00, 10.03.78 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для измерения координат центра тяжести изображения объекта | 1988 |
|
SU1660208A1 |
| Устройство отображения видеоинформации в радиолокационных системах | 1988 |
|
SU1628223A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| Устройство управления телевизионной системой манипуляционного робота | 1988 |
|
SU1732495A1 |
