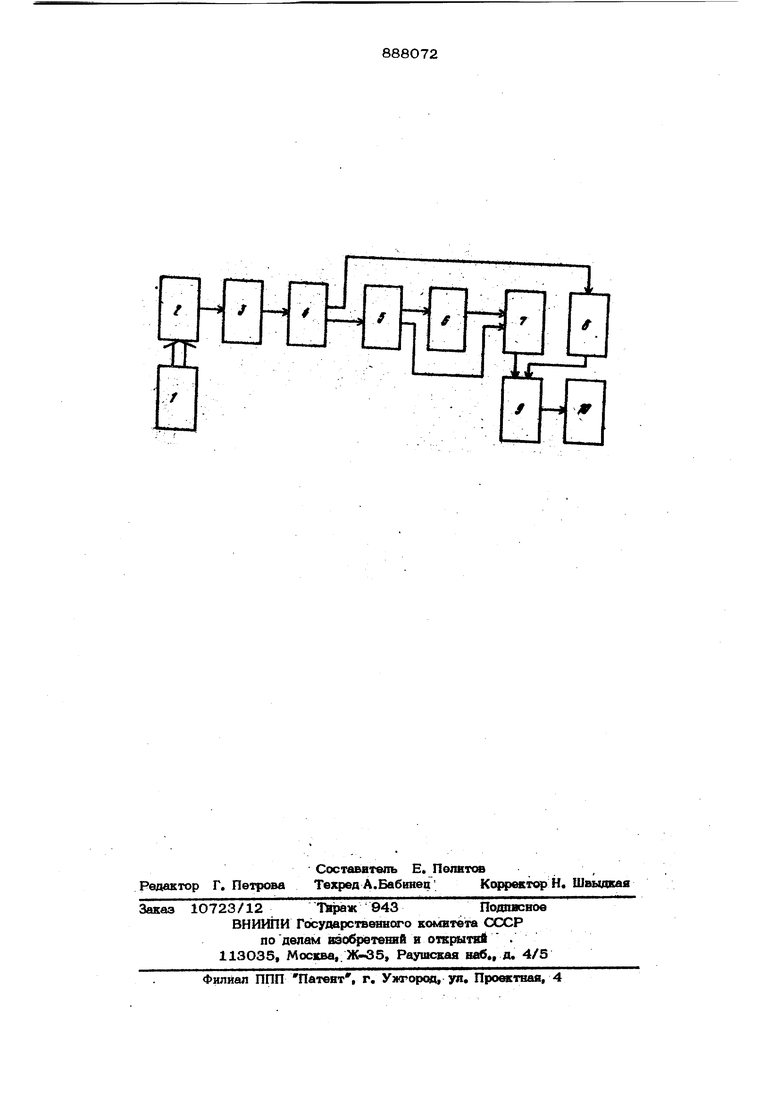
(54) УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АДАПТИВНЫМ Изобретение относится к робототехнике и может быть использовано при создании систем управления промышленным роботЬм, Известно устройство для управлении адаптивным роботом, содержащее блок ввода изображения, блок управления, блок определения центра тяжести и блок форм рования сигналов перемещения 11 . Наиболее близким техническим решением к изобретению является устройство Г2 /содержащее транспортный орган, последовательно соединенные блок датчиков, блок формирования растра, ком мутатор команд, блок памяти, блок срав нения и блок формирования сигналов пер мещени5я. Недостат1(ом этого устройства является низкое быстродействие вследствие необходимости перевода изображения из декартовых координат в полярные. Целью изобретения является повышение быстродействия устройства. РОБОТОМ Устройство содержит последовательно соединенные блок выделения контура, блок определения координат центра формы и блок определения полярной диаграммы, выход которого подключен ко вторюму входу блока сравнения, а второй вход - ко второму выходу блока выделения контура, вход которого соединенс вторым выходом коммутатора команд, а транспортный орган вьтолнен в виде многогранного желоба, в грани которого встроены датчики. На чертеже представлена функциональная схема предлагаемого устройства. Устройство содержит транспортный орган 1, блок 2 датчиков, блок 3 формирования растра, коммутатор 4 команд, блок 5 выделения контура, блок 6 определения координат центра формы, блок 7определения полярной диаграммы, блок 8памяти , блок 9 сравнения, блок 10 формирования сигналов перемещения. Устройство работает следующим образом. Деталь, попадая в орган 1, перемешается по нему и в процессе движения занимает одно из нескольких возмож ных устойчивых положений. При попадании детали в зону действия блока 2, содержащего Vyj датчиков, блок 3 начинает формировать растр внешнего контура детали, в видь вектор строки . т 4 расстояние от -i .-го датчика до поверхности детали. Сформированный растр через коммутатор 4 поступает в блок 5. Блок 5 осуществляет пересчет вектора в матрицу y/2vyi i элементы которой равны зна енйям координат точек поверхности детали, с которых считывается информация всистеме координат ХОУ, связанной с транспортным органом. Элементы матрицы определяются следующим образом У/, °° 1 ° -1 После выделения контура для каждого считанного растра в блоке 6 определения центра формы контура вычисляется значение координат центра формы. Информация из блоков 5 и 6 поступает на вход блока 7. Полярная диаграмма формируется в виде вектора строки Яуу, элементы которого RK--() U /. Вычисленные значения Ryy, сравниваются в блоке 9 возможными значениями R соответствующими различным положения детали, записанным в блоке 8 на этапе обучения. Переключение режимов работа обучение осуществляется коммутатором. 4. При достижении соответствияRyy R 2.4 блок 10 формирует сигналы перемещения на соответствующие приводы робота. Применение предлагаемого устройства позволяет сократить время определекия параметров положения объектов с 3-4 с у устройства-прототипа до 0,5-1с. Формула изобретения 1.Устройство для управления адаптивным роботом, содержащее транспортный орган, последовательно соединенные блок датчиков, блок формирования растра, коммутатор команд, блок памяти, блок сравнения и блок формирования сигнашов, перемещения, отличающееся тем, что, с целью повыщения быстродействия устройства, введены последовательно соединенные блок вьщеления контура, блок определения координат центра формы и блсж определения полярной диаграммы, выход которого подключен к второму входу блока сравнения, а второй вход - к второму выходу блока вьщеления контура, вход которого соединен с вторым выходом коммутатора команд. 2,Устройство по п. 1, о т л и ч а ю щ е е с я тем, что транспортный орган выполнен в виде многогранного желоба, в грани которого встроены датчики. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР N9 591312, кл. В 25 J 9/ОО, 1976. 2.Авторское свидетельство СССР № 470791, кл. В 25 J 9/ОО, 1974 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU881669A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АДАПТИВНЫМ МОБИЛЬНЫМ РОБОТОМ | 2000 |
|
RU2187832C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ВРАЩАЮЩЕГОСЯ РЕАКТИВНОГО СНАРЯДА | 1997 |
|
RU2122175C1 |
| СПОСОБ УПРАВЛЕНИЯ РАКЕТОЙ И СИСТЕМА УПРАВЛЕНИЯ ЕГО РЕАЛИЗУЮЩАЯ | 2013 |
|
RU2549615C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОНОМНЫМ РОБОТОМ | 2008 |
|
RU2424105C2 |