1
Изобретение относится к робототехнике и может быть использовано для управления адаптивными роботами при автоматизации производственных процессов.
Известно устройство для управления адаптивным роботом, содержащее блок ввода изображения, блок управления, логический блок и приводы исполнительного органа
Однако устройство имеет узкие функциональные возможности.
Наиболее близким техническим решением к изобретению является устройство, содержащее последовательно соединенньае коммутатор команд,блок памяти, блок формирования сигналов. перемещения, приводы и датчики положения исполнительного органа, выходы которых подключены ко вторым входам блока формирования сигналов перемещения, а также последовательно соединенные блок управления, блок формирования прямоугольного растра, коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, причем первый вход блока управления подключен ко вторсялу выходу коммутатора команд, второй вход - к первому выходу
блока памяти, третий вход - ко второму выходу блока формирования сигналов перемещения, второй выход - к первому входу коммутатора команд,
5 третий выход - ко второму входу блока формирования сигналов перемещения, а четвертый выход - ко второму входу коммутатора разверток Недостатками этого устройства
0 являются невозможность определения угла ориентации в случае,-если размеры детали меньше радиуса круговой развертки, и неточность определения угла ориентации .. в случае, если деталь имеет пазы или отверстия в местах пересечения круговой развертки с деталью.
Цель изобретения - расширение функциональных возможностей устройства.
Поставленная цель достигается тем, что устройство содержит дешифратор, сумматор ипоследовательно соединенные блок вычисления координат
25 крайних точек, блок вычисления размера проекциии блок сравнения, выход и второй вход которого подключены соответственно ко второму входу и третьему выходу коммутатора
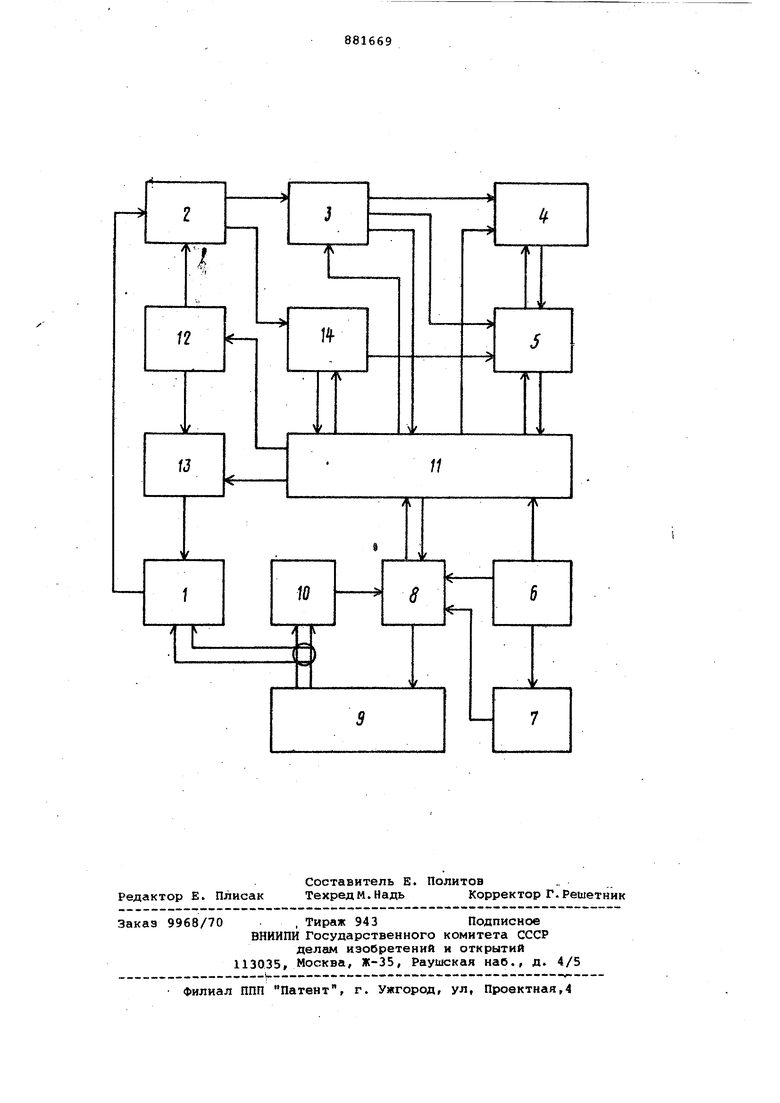
30 команд, а третий вход - к пятому выходу блока управления, четвертый вх и шестой рыход которого соединены .соответственно со вторыми выходом и входом блока вычисления размера про екции, третьим выходом подключенного, к третьему входу коммутатора команд, второй выход блока памяти чер дешифратор соединен с четвертым вхо дом блока формирования сигналов пер мещения, первый вход сумматора подкл чен ко второму выходу блока вычисле ния координат крайних точек, первый выход - к четвертому входу коммутатора команд, а вторые вход и выход - к седьмому выходу и пятому входу блока управления соответствен но, причем выход блока ввода изобра жения соединен со в-рорым входом блока вычисления координат крайних точек. На чертеже представлена функциональная схема устройства. Устройство содержит блок 1 ввода изображения, блок 2 вычисления координат крайних точек, блок 3 вычисления размера проекции, блок 4 сравнения, коммутатор 5 команд,блок 6 памяти, дешифратор 7, блок 8 форми рования сигналов перемещения,приводы 9, датчики 10 положения исполнительного органа, блок 11 управления, блок 12 формирования прямоуголь ного растра, коммутатор 13 разверток сумматор 14. Устройство работает следующим образом. Положение детали на рабочей поверхности определяется координатами ее центра тяжести VQ и углом ориентации оси симметрии относительн некоторой линии отсчета. Вычисление координат положения детали на ра.бочей поверхности начинается с момента поступления импульса передачи управления из блока 8 формирования сигналов перемещения в блок 11 управления Расположение блока 1 ввода изображения в схвате робота свидетельствует о выходе схвата в центр заданной зоны обзора. Вычисление интересующих параметров осуществляется путем обработки оптической информации о положении детали в зоне обзора, форми руемой блоком 1 ввода изображения. Чувствительным элементом блока 1 ввода изображения является фотоприемная матрица, на матричное фоточувствительное поле которой с помощью объектива проецируется изображение детали. С началом работы устройства блок 11 управления запускает блок 12 формирования прямоугольного растра. Выходные сигналы блока 12 поступают на вход коммутатора 13 разверток поступающего Под действием сигнала из блока 11 управления на вход коммутатора 13 разверток, выходные сиг налы блока 12 формирования прямоугольного растра через коммутатор 13 разверток подаются на вход блока 1 ввода изображения. На выходе блока Iввода изображения появляется сигнал, логическое значение которого соответствует оптической информации, воздействующей на выбранный элемент информационного поля фотоприемной матрицы. На основании логических значений сигналов, поступающих с выхода блока 1 ввода изображения и с выхода блока 12 формирования прямоугольного растра, блок 3 вычисления координат крайних точек вычисляет координаты крайних точек положения объекта по оси X. Затем значения координат крайних точек поступают на блок 3 вычисления размера проекции и сумматор 14. Сумматор 14 вычисляет значение координаты Хс центра тяжести детали. Блок вычисления размера проекций вычисляет размер проекций дХ.) детали по оси X. После окончания вычисления координаты Хс и вычисления размера проекций по X на вход блока IIуправления поступают сигналы, свидетельствующие об этом, и блок 11 управления Через коммутатор 5 команд обеспечивает запись информации о координате Хс с выхода сумматора 14 в соответствующие ячейки блока 6 памяти. Значение размера проекции аХ записывается в блок 4 сравнения. После этого блок 11 управления переключает коммутатор 5 команд и коммутатор 13 разверток в режим определения координаты YC. и размера проекции с Y по оси У. Значение Усчерез коммутатор 5 команд заносится в блок 6 памяти. Затем в блок 4 сравнени через коммутатор 5 команд поступав значение размера проекции лУ-1. По сигналу с блока 11 управления производится сравнение величин и Х, и дУ, Знак результата сравнения через коммутатор 5 команд заносится в соответствующую ячейку блока 6 памяти. При захвате детали схватом, имеющим форму плоскопараллельных губок, деталь поворачивается под действием момента, создаваемого губками. Угол поворота схвата, необходимый для захвата детали, определяется следующим образом. После определения Х, Ур. и знака (liX/1-ДУ-,) коммутатор 5 команд вырабатывает сигнал, который подается на блок 11 управления. Блок 11 управления вырабатывает сигнал, по которому блок 8 фо1 лирования сигналов перемещения формирует сигнал на приводы 9 для поворота блока 1 ввода изображения на - После получения сигнала от блока 8 формирования сигналов перемещения блоком 11 управления о том, что блок. ввода изображения развернут на i блок 11 управления вырабатывает сигналы для вычисления aXii, ДУ г и их сравнения. Знак сравнения (uXf - u Yj) заносится в соответствукицую ячейку блока 6 памяти через коммутатор 5 команд. По сигналу с коммутатора 5 команд из блока 6 памяти информация о знаках (ДХ - дУ) и (iXij -AYa) поступает на вход дешифратора 7, На соответствуюдем выходе дешифратора 7 появляется сигнал, по которому блок 8 формирования сигналов перемещения формирует сигнал на приводы 9 для по ворота схвата. Одновременно формируются сигнсшы на приводы 9 робота для других перемещений по сигналам с блока 6 памяти. После обработки механизмов робота, т.е, после того, как схват будет находиться над центром тяжести детали развернутым на соответствующий угол, подается сигнал на привод сжатия схвата. После захвата детали и разворота схвата в начальное положение на блок 11 управления поступает сигнал с блока 8 фО1 4Ирования сигналов перемещения. По сигналу с блока 11 управления производится вычисление координаты Хб в последовательности, указанной выше. Повторное вычисление координаты Хс необходимо, так как центр тяжести детали смещается при развороте ее в схвате. Применение изобретения позволяет расширить функциональные возможности адаптивного робота. Формула изобретения Устройство для управления адаптив ным роботом, содержащее последовательно соединенные коммутатор команд блок памяти, блок формирования сигналов перемещения, приводы и датчик положения исполнительного органа,вы ходы которых подключены ко вторым входам блока формирования сигналов переметцения, а также последовательно соединенные блок управления,блок формирования прямоугольного растра коммутатор разверток и блок ввода изображения, установленный на схвате исполнительного органа, причем первый вход блока управления гищ ключей ко второму выходу коммутато ja команд, второй вход - к первому выходу блока памяти, третий вход второму выходу блока формирования сигналов перемещения, второй выход к первому входу коммутатора команд, третий выход - ко второму входу блока формирования сигналов перемещения, а четвертый выход второму входу коммутатора разверток, отличающееся тем, что, с целью расширения функциональных возможностей устройства, оно содержит дешифратор, сумматор и последовательно соединенные блок вычисления координат крайних точек, блок вычисления размера проекции и блок сравнения, выход и второй вход которого подключены соответственно ко второму входу и третьему выходу коммутатора.команд, а третий вход к пятому выходу блока управления, . четвертый вход и шестой выход которого соединены соответственно .со вторыми выходсм и входом блока вычисления размера проекции, третьим выходом подключенного к третьему входу .коммутатора команд, второй выход блока памяти через дешифратор соединен с четвертьм входоти блока формирования сигналов перемещения, первый вход сумматора подключен ко второму выходу блока вычисления координат крайних.точек, первый выход - к четвертому входу коммутатора команд, а вторые вход и выход - к седьмому выходу и пятому входу блока управления соответственно, причем выход блока ввода изображения соединен со вторым входом блока вычисления координат крайних точек. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство ССС № 470791, кл. G 05 В 15/00, 1976. 2.Авторское свидетельство СССР по заявке 2687007/18-24, кл. В 25 J 9/00, 1978 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления адаптивным РОбОТОМ | 1978 |
|
SU813360A1 |
| Устройство для управления адаптивным роботом | 1979 |
|
SU883867A2 |
| Устройство для управления адаптив-НыХ РОбОТОМ | 1979 |
|
SU834667A1 |
| Устройство для управления адаптивным роботом | 1977 |
|
SU704775A1 |
| Устройство для управления адап-ТиВНыМ РОбОТОМ | 1978 |
|
SU811202A1 |
| Устройство для управления адаптивным роботом | 1980 |
|
SU888072A1 |
| Устройство для отображения графической информации на экране телевизионного индикатора | 1989 |
|
SU1615783A1 |
| Устройство для контурного управления промышленным роботом | 1984 |
|
SU1211691A1 |
| Устройство для отображения графической информации на экране электронно-лучевой трубки | 1981 |
|
SU963079A1 |
| Телевизионный пеленгатор | 1989 |
|
SU1670805A1 |