(54) .УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ИНДИКАТОРНОЙ МОЩНОСТИ ПОРШНЕВЫХ МАШИН
3
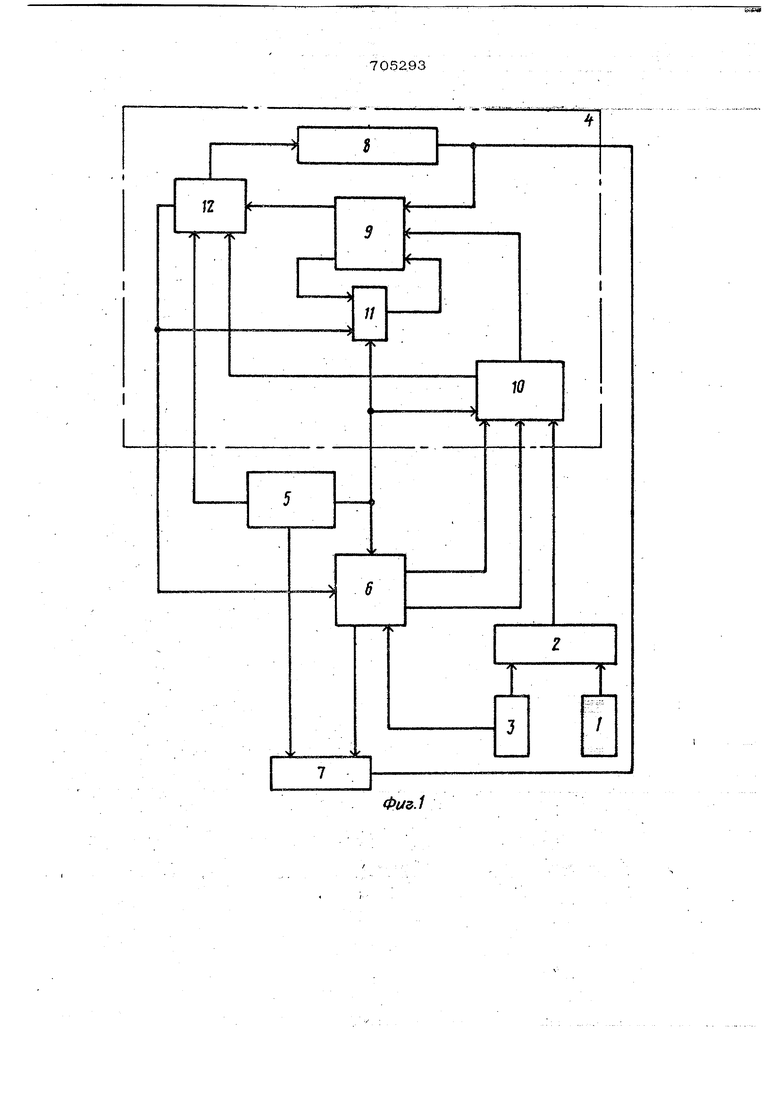
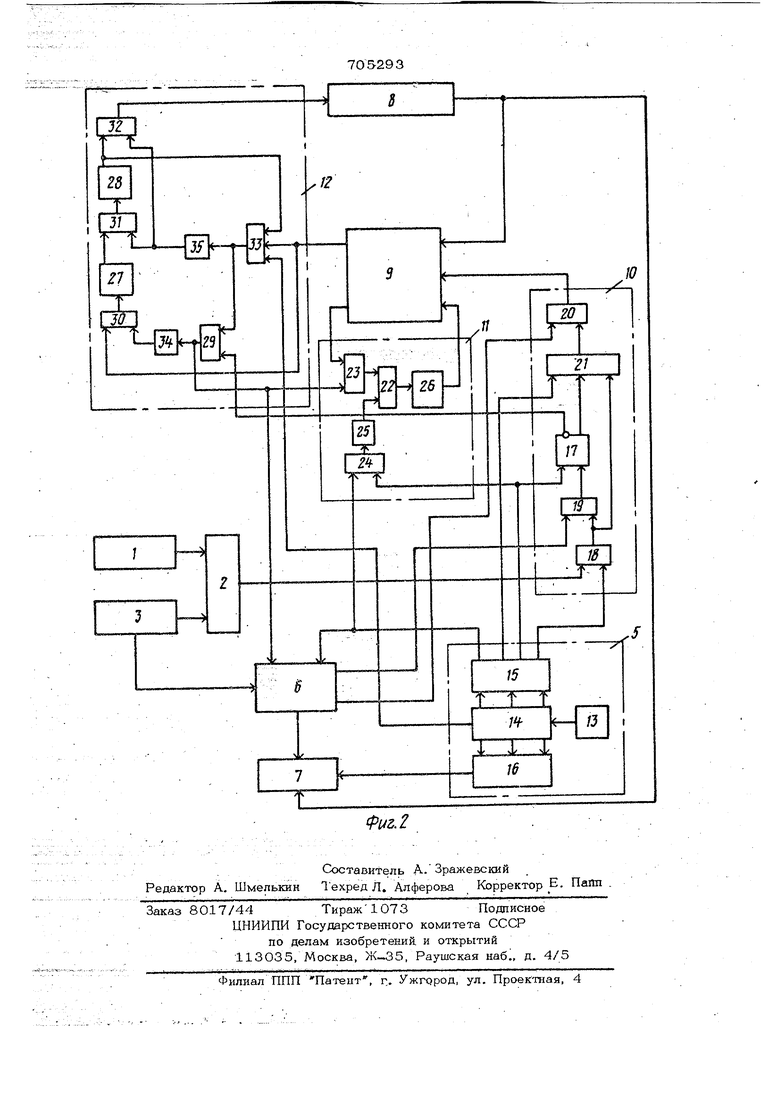
705293 Это обеспечивается тем, что в устройстве для измерения индикаторной . мощности поршиёвых машин, содержащем датчик давления и датчик угла поворота одновибратор, управляющий вход крторого соединен с выходом датчика давления а запускающий вход - с первым выхойом датчика поворота, блок управления, соединенный первым входом с вторым выходом датчика угла поворота и первы выходом - с первым входом блока ре гйстграции, соединённого вторым входом с первым выходом блока синхронизации и третьим входом - с выходом динаМи4i6 CKOro регистра и первым входом двои ноТб сумматора, соединенного выходом -- - С первым входом схемы переноса, выход которой соединен с вторым входом сумматора, двоичный сумматор соединен выходом с первым входом схемы коррек ции, первый вь1ход которой бредийён с входом динамического регистра, второй ;ffi}85ff- eBTdpbiMH вхлда; схемы пё-. реноса и блока управления, второй вход с вторым выходом блока синхронизации, . третий ;вь1ход кот6|рого соединен с тре: тьим входом схемы переноса, с третьим входом блока управления и первым входом схемы ввода, второй вход которой соединен с выходом одновибратора, третий и четвертый входы - с вторым и третьим выходами блока управления соответственно первый выход - с третьим входом двоичного сумматора, второй выход - с третьим входом схеМы коррекции / На фиг. 1 изображена структурная схема устройства для измерения индикаторной мощности поршневых машин; на фиг. 2 -. функциональная схема предложенного устройства, . Устройство для измерения мощности поршневых мащин содержит датчик 1 дав ления, одновибратор 2, датчик 3 угла поворота, вьгчпслйтельный блок 4, блок 5 Синхронизации, блок 6 управления и блОк 7 регистрации. Вычислительный блок 4 состоит из динамического регист ра 8, последовательного двоичного сумматора 9, схемы 10 ввода, схемы 11 переноса и схемы 12 коррекции. Выход датчика 1 давления пОйКЛйчен к управля щемУ входу одновибратора 2, зйпускающий вход которого подключен к первому выходу датчика 3 угла поворота. Второй выход датчика 3 угла поворота подклю чён к первому входу блока 6 управления Выход динамического регистра 8 соединей с первым входом блока 7 регистрации, и первым входом сумматора 9, второй вход которого подключен к первому выходу схемы 10 ввода, а третий вход - к выходу схемы 11 переноса. Первый выход сумматора 9 подключен к первому входу схемы 12 коррекции, второй выход сумматора 9 соединен с первым входом схемы 11 переноса. Второй вход схемы 11 переноса соединен с первым выходом схемы 12 коррекции и вторым BXOUOM блока 6 управления. Первый выход блока 5 синхронизации соединен с первым входом схемы 10 ввода, третьим входом схемы 11 перю- носа и третьим входом блока 6 управления. Третий выход блока б управления соединен с вторым входом блока 7 регистрации, третий вход которого подклк чен к второму выходу блока 5 синхронизации, боёдиненногЬ Третьим выходом с вторым входом схемы .12 коррекции. Второй выход схемы 12 коррекции подключен к входу динамического регистра в, а третий вход - к второму выходу схемы 10 ввода. Второй вход схемьг 10 ввода соединен с выходом одновибратора 2, третий и четвёртый входы - соответственно с первым и вторым выходами блока 6 управления. Блок 5 синхронизации (фиг. 2) состоит из кварцевого генератора 13, двоичного счетчика 14, дешифратора 1 5 разрядов и дешифратора 16 тетрад. Схема ввода 10 содержит триггер 17, три элемента И 18-20 и элемент ИЛИ 21. Схема 11 переноса включает элемент И 22, два. элемента ИЛИ 23,24, инвертор 25 и J -Триггер 26. Схема коррекции 12 содержит два 1 -триггера 27, 28, пять элементов И 29-33 и дваинвертора 34, 35. На функциональной схеме (фиг, 2) выход датчика 1 давления соединен с управляющим входом одновибратора 2, запускающий вход которого подключен к первому выходу датчика угла поворота 3, соединенного вторым выходом с первым входом блока управления 6. Выход одновибратора 2 соединен с первым . входом элемента И 18 схемы 10 ввода, второй вход которого подключен к первому в;ыходу дешифратора 1В блока 5 с инхронизации. Четыре выхода дешифратора 1 5 образуют первую группу выходов блока 5 синхронизации. Выход элемента И 18 соединен с первым входом элеМента И 19 и первым входом элемента , ИЛИ 21, второй вхой которого подклю- .
чен к прямому выходу триггера 17. Прямой вход триггера 17 соединен с выходом элемента Н 19, инверсный вход - с первым входом элемента ИЛИ 24 схемы 11 переноса и вторым выходом Дешифратора 15 блока 5 синхронизашш, третий выход которого соединен с третьим входом элемента ИЛИ 21. Выход элемента ИЛИ 21 подключен к первому входу элемента И 20, второй вход которого подключен к первому выходу блока 6 управления, соединенного вторым выходом с вторым входом элемента И 19. Выход динамического регистра 8 подключен к-первому входу блока 7 регистрации и первому входу сумматора 9, второй вход которого соединен с вызсодом элемента И 20 схемы 10 ввода, а третий вход - с аыходом Ji-триггера 26 схемы 11 переноса. Вход 3i-триггера 26 соединен с выходом элемента И 22, первый вход которого подключен к выходу элемента ИЛИ 23, а второй вход- к выходу инвертора 25, Вход инвертора 25 соединен с выходом элемента ИЛИ 24, второй вход которого подклю1ен к четвертому выходу дешифратора 1S блока 5. синхронизаши и третьему входу блока 6 управления. Первый выход сумматора 9 подключен к первым входам элементов И 30 и И 33 схемы 12 корре шш, второй выход - к первому входу элемента ИЛИ 23 схемы 11 переноса. Выход элемента И 33 соединен с входом инвертора 35 и первым входом элемента И 29, второй вход которого подключен к инверсному выходу триггера 17 схемы 10 ввода. Выход элемента И 29 соединен с входом инвертора 34, вторым входом элемента ИЛИ 23 схемы 11 . переноса и вторым входом блока 6 управления. Вход 1) -триггера 27 соединён с выходом элемента И 30, второй вход которого подключен к выходу инвертора 34. Вход В-Триггера 28 соединен с выходом элемента И 31, первый вход которого подключен к выходу J) -триггера 27. Выход I)-триггера 28 соединен с первым входом элемента И 32 и вторым входом элемента И 33, третий вход которого подключен к одному из выходов двоичнбго счетчика 14 блока i5 синхронизации, другие выходь которого соединены с входами дешифраторов 15 и 16. Вход двоичного счетчика 14 соединен с выходом кварцевого генератора 13 блока 5 синхронизации. Выход
инвертора 35 соединен с вторыми входами элементов И 31 и И 32. Выход элемента И 32 соединен с входом динамического регистра 8. Второй вход блока 7 регистрации подключен к третьему выходу блока 6 управления, а тре-гай вход блока 7 регистрации соединены с выходами дешифратора тетрад 16 блока 5 I синхронизации.
Устройство для измерения индикаторной мощности поршневых машин работает следующим образом.
Датчик 1 давления вырабатывает электрический сигнал, пропорциональный текущему давлению в цилиндре. Датчик 3 угла поворота-выдает по первому выходу импульсы, соответствующие центральным точкам элементарных объемов, на которые условно разбивается рабочий объем цилиндра. Полная работа совершаемая газами за ход поршня равна
°:-Д з,-,О) ,
где Р; - давление газов в цилиндре,
соответствующее Vj элементу объёма.цилиндра;
g-j количество элементарных объеMOBu.Nj .
Суммируя положительндю и отрицательную работы в цилиндре за один л -ый , получаем работу на i ом цикле
) и среднее индикаторное давление на -ом цикле
(-Н
Д
(3)
где - рабочий объем цилиндра,
р.. - давление в цилиндре в i-ом инкле в j-ой точке разбиения
объема цилиндра.
Индикаторная мощность определяется по выражению
. ft)
50
Н
ТДе С - постоянный коэффициент конструк1ши двигателя, Y - постоянный интервал времени
измерения,
- количество оборотов коленчатого вала за единицу времени. Vn- lT - количество оборотов коленчатого вала за интервал Т времени измерения. Предлагаемое устройство штя измерения индикаторной мощноста поршневых машин реализует соотноше1ше (4) следующим образом. Динамический регистр 8, последовательный двоичный сумматор 9, схема 10 ввода, схема 11 переноса и схема 12 коррекции образуют реверсивный десятичшай счетчик, который выполняет суммирование количества импульсов, пропорциональных положительной работе и вычитание количества импульсов, пропорциональных отрицательной работе. Кроме этого, вычислительный блок 4 производит вычисление постоянного интервала Т времени измерения, по окончанинр которого схема 12 коррекции вы дает по первому выходу сигнал на второй вход блока 6 управления. Блок 6 управления по сигналу окончания интервала Т времени измерения вырабатывает по первому выходу сигнал останова вычислений, а по третьему выходу - сигнал запуска блока 7 регистрашш, который осуществляет вывод результата измерения индикаторной мощности с вы- хода динамического регистра 8 на десятичную индикацию или цифрсяечать. Формула изобретения . Устройство для измерения индикаторн мощнос-ш поршневых машин, содержащее датчик давления и датчик угла поворота одновибратор, управляющий вход которого соединен с выходом датчика давления ii запускающий вход - с выходом датчика угла поворота, блок управления, соединенный первым входом с вторым выходом датчика угла поворота и первым выходом - с первым входом блока регистрации, соединенного вторым входом с первым выходом блока синхронизации и третьим входом.- с выходом динамического регистра и первым входом двоичного сумматора, соединенного выходом с первым входом схемы переноса, выход которой соединен с вторым входом сумматора, отличающееся тем, что, с целью повыщения точности измерения и упрощения конструкции устрсйства, в нем двоичный сумматор соединен выходом с первым входом схемы коррекции, первый выход которой соединен с входом динамического регистра, второй выход - с втopы ffi входами схемы переноса и блока управления, второй вход - с вторым выходом блока синхронизации, третий выход которого соединен с Третьим входом схемы переноса, с третьим входом блока управления и первым входом схемы ввода, второй входкоторой соединен с выходом одновибратора, третий и четвертый входы - с вторым и третьим выходами блока управления соответственно, первый выход с Третьим входом двоичного сумматора, второй выход - с третьим входом схемы коррекции., Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № 277334, кл. 2 QOl Ц 23/08, 1968. 2.Авторское свидетельство .СССР № 432363, кл. 2 G01 L 23/08, 1972. (прототип).
Г- rz
ч ч


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения индикаторной мощности поршневых машин | 1978 |
|
SU777522A2 |
| Многоканальное устройство для до-пуСКОВОгО КОНТРОля пАРАМЕТРОВ | 1979 |
|
SU840819A1 |
| Устройство для допускового контроляОб'ЕКТА | 1979 |
|
SU834678A1 |
| Устройство для допускового контроля объекта | 1984 |
|
SU1246060A1 |
| Функциональный преобразователь | 1983 |
|
SU1108442A1 |
| Цифровой регулятор | 1980 |
|
SU938255A1 |
| Устройство для допускового контроля | 1978 |
|
SU771619A1 |
| Устройство для допускового контроля | 1980 |
|
SU898390A2 |
| Цифровой регулятор | 1979 |
|
SU938253A1 |
| Устройство для допускового контроля параметров объектов | 1982 |
|
SU1056134A1 |
у t
.1
