(54) ПНЕВМАТИЧЕСКОЕ КОМПЕИСИРУОПЕЕ УСТРОЙСТВО

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический регулятор с переменнойСТРуКТуРОй | 1979 |
|
SU851337A1 |
| Адаптивный пневматический регулятор | 1977 |
|
SU661505A1 |
| Пневматический самонастраивающийся регулятор | 1976 |
|
SU590693A1 |
| Пневматический регулятор | 1978 |
|
SU840796A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU679939A1 |
| Пневматический пропорционально-интегрально-дифференциальный регулятор | 1982 |
|
SU1043587A1 |
| Пневматическое устройство для формирования функции переключения | 1980 |
|
SU860085A1 |
| Пневматический регулятор | 1987 |
|
SU1474589A1 |
| Пневматическое регулирующее устройст-BO | 1978 |
|
SU802920A1 |
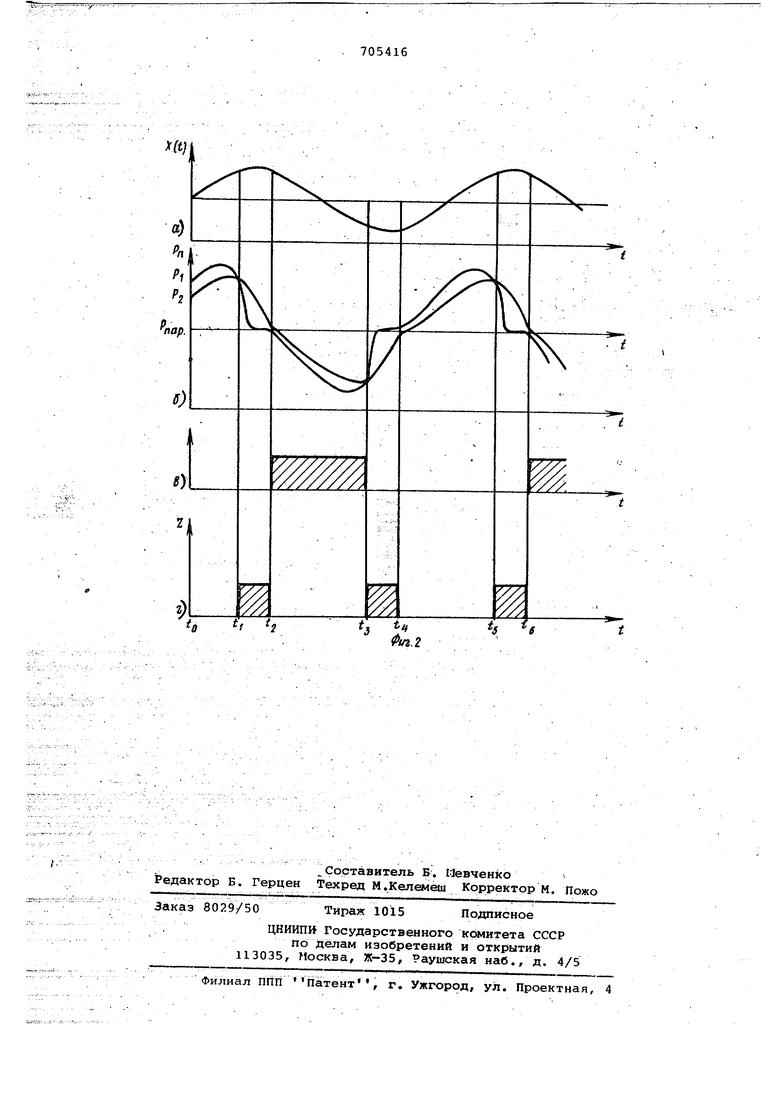
Изобретение относится к области пневматического приборостроения и мо жет быть использовано при синтезе си стем автоматического управления инер ционными технологическими процессами Известен линейный упредитель, который предназначен для компенсации чистого запаздывания в системе регулирования 1, . Известное устройство не улуч1Уает качество регулирования инерционных объектов и приводит к незатухающему колебательному переходному, пррцес У Наиболее близким к изобретению техническим решением является пневма тическое компенсирующее устройство, содержащее две ячейки предварения, два сумматора и дроссельный делитель Выходной сигнал в устройстве Формиру ется по закону dPj,., ЗРвь,у т - k т-Т РХ cit Ч dt где Pgx / РВЬЦ входная и выходная величины; Т, Т - постоянные времени; Kg - коэффициенты усиления .2 . Недостаток известного устройства в том, что компенсирующее во.здейст зи формируется лишь при наличии скорости изменения регулируемого параметра. При наличии же существенной инерционности регулируемого объекта компенсирующее воздействие будет незначительным, что приводит к ухудшению j aчества регулирования. Целью изобретения является увеличение быстродействия и улучшение динамических характеристик. . Поставленная цель достигается тем, что в устройстве установлены логический блок, блок определения знака производной и блок формирования выходного сигнала, к входам которого подключены входные каналы параметра и задания, а к управляющему входу - выход логического блока, подключенный к управляющему входу первой ячейки предварения, выход сумматора подклю- , чен к первому входу логического блока, второй вход которого подключен к выходу блока определения знака производной, инверсные, камеры которого подключены к выходу второй ячейки, предварения и входному каналу параметра , , На фиг. 1 представлена принципиальная схема устройства; на фиг. 2,авременной график изменения сигнала ошибки на фиг, 2,6 - график измеиенй я выходной величины первой и второй ячеек предварения; на фиг. 2,в график изменения выходной величины элемента, определяющего знак производной; на фиг. 2,г - график изменения выходной величины устройства. Устройство содержит две ячейки 1 и 2 предварения, сумматор 3, определяющий зна.к между выходными величина ми первой и второй ячейки предварений , логический блок 4, блок 5 определения знака производной и блок б формировайия выходного сигнала. Каждый вход ячейки предварения соединен с входным каналом параметра Pnfep Ячейка 1 предварения включает пятимембранный элемент 7 сравнения, уп равляемый дроссель 8, трехмембранное реле 9, емкость 10, два переменных дросселя 11 и 12, два постоянных дро селя 13 и 14 и задатчик 15. Ячейка 2 предварения состоит из пятимембранного элемента 16 сравнения, управляемого дросселя 17, емкости 18, переменного дросселя 19, двух постоянных дросселей 20 и 21 и задатчика 22. В качестве сумматора 3 используется трехмембранный элемент 3 сравнения, определяющий знак между выходными величинами первой и второй ячейки предварения. Логический блок 4 выполнен на дву универсальных реле 23 и 24 и выключа ющем реле 25. В качестве блока 5 оп ределения знака производной используется дискретный элемент сравнения Блок б формирования выходного сигнала содержит универсальное реле 26 и дроссельный сумматор, состоящий из постоянных дросселей 21 vi 28 и усилителя 29 мощности. Устройство работает следующим об разом. Первая ячейка предварения формирует ригнал P,--T--g --tPg, где .сслм,-1, .-РВЫХ ОПостоянные времени предварения Т Tj. настраиваются путем изменения ве сопротивления регулируемых дросселей 11 и 12 соответственно, причем сопротивление дросселя 11 меньше, чем дросселя 12. Подключают ся тот или иной дроссель в отрицательную обратную связь элемента 7 сравнения посредством реле 9. Выбор дросселя осуществляется по команде выходного сигнала логического блока 4. Управляемый дроссель 8 служит дл изменения чувствительности ячейки предварения и управляется ручным задатчиком, также не- исключается во можность управления от внешнего управляющего воздействия. Ячейка 2 предварения работает ан .логично за исключением того, что им т одну постоянную времени предвареия То, и формирует сигнал dt вчПричем ячейки предварения настраваются, как показано на-фиг. 26, именно, на отрезке изменения параP f sign имеет Р ь на отрезке t логический блок 4 формирует упреждающий дискетный сигнал , который постуает на управление реле 9, которое одключает в обратную связь элемента 7 сравнения дроссель 11, проводимость которого больше, чем у дросселя 12, этим самым обеспечивается быстрое движение выхода первой ячейки предва;рения к значению величины параметра, которое обеспечивает чистую работу сумматора 3. В точке tj при появлении сигнала squ х О, логический блок 4 отрабатывает сигнал Z О, I Аналогичным образом происходит формирование в блоке 4 упре)тоа.ющего сигнала Z 1 на отрезке t, здесь также Р Область существования упреждающего сигнала при необходимости можно увеличитьИЛИ уменьшить посредством изменения проводимости управляемых дросселей 8 и 17, а также переменных; дросселей 12 и 19. Управляющее воздействие на основе упреждающего сигнала Z, который появляется в области экстремального значения параметра на отрезке , tj-t и т. д. может формироваться, например, как в регуляторе с пропорциональным смё 5ением равновесия по . , Р . вых oL-vp, пар где cL- проводимость дросселя 27, а р- проводимость дросселя 28, т. е. при возникновении упреждаюс1его сигнала Z осуществляется смещение задания к параметру. Выход универсального реле 26 соединен с входом усилителя 29, выход которого соединен с выходным каналом устройства,. Устройство может бть применено при синтезе систем автоматического регулирования инерционными объектами. Эффек тивность предложенного устройства, которое используется для синтеза систем автоматического регулирования инерционными объектами и может быть, например, включено в линию задания основного регулятора заключается в том, что за счет наличия упреждающего сигнала, который формируется раньше, чем изменит свое направление параметр, основной регулятор формирует управляющее воздействие, способное сократить время и уменьшить перерегулирование в переходном процессе и улучмить качество регулирования в установившемся режиме.
Формула изобретения
Пневматическое компенсирующее устройство, содержащее две ячейки предварени)я, входы которых подключены к входному каналу параметра, а выходы - к управляющим камерам сумматора и канал задания, о т л и ч а ю щ е е с я тем, что, с целью увеличения быстродействия и улучшения динамических характеристик/в нем установлены логический блок, блок определения знака производной и блок формирования выходного сигнала, к входам которого подключены входйые
каналы Параметра и задания, а к управляющему входу, - выход логического блока, подключенный к управляющему входу первой ячейки предварения, вы-, ход сумматора подключен к первому входу логического блока, второй вход которого подключен к выходу блока определения знака производной, инверсные камеры которого подключены к выходу второй ячейки предварения и .
0 входному каналу-параметра.
Источники информации, принятые во внимание при экспертизе .1. Сб. Теория непрерывных систем; 1 конгресс ИФАК, АН СССР М., 19б1 с. 102-105.
Фиг.2
