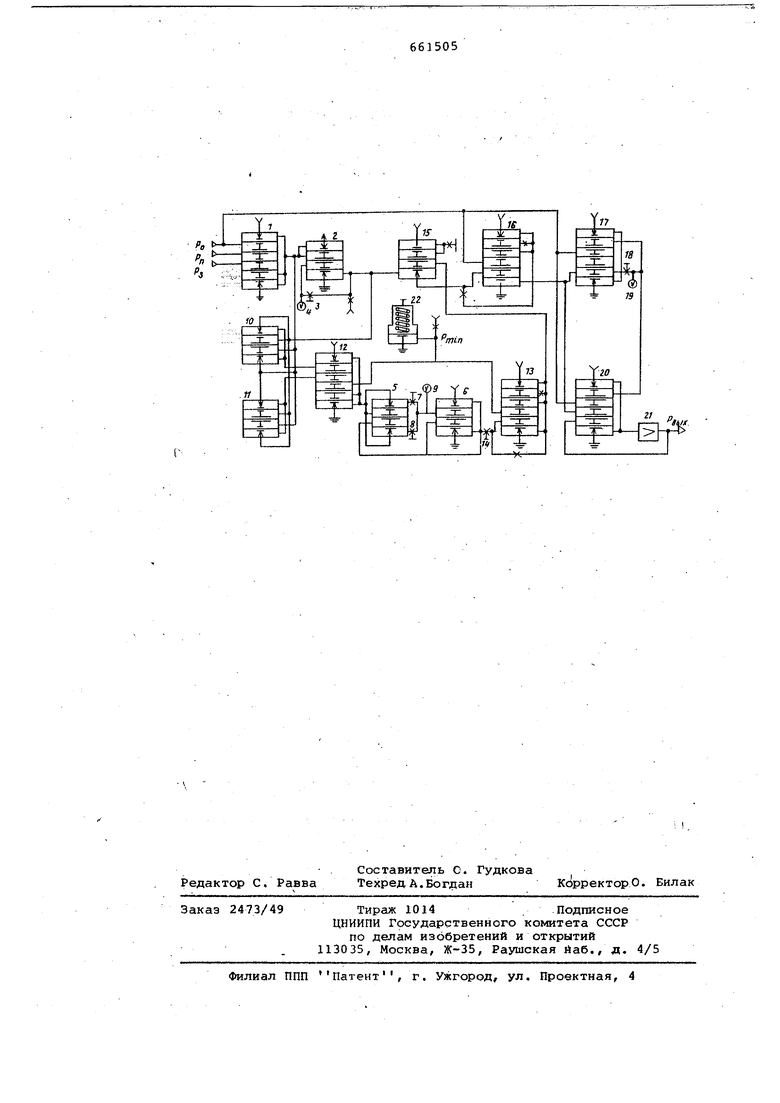
. Изобретение относится к области средств автоматизации, а именно к адаптивншл регуляторам и может быть применено в локальных системах авто матического регулирования для неста ционарных объектов нефтехи Ш|1ёской, нефтеперерабатыва|6{Аей и других отраслях проммаленнрстй. Наиболее близким техническим решением к данному является адаптивный пневматический регулятор, сО|Де1якащий элемент сравнения, входнме каналы которого подключены к каналам параметра, задания/и опорного да&ления, блок предварения, фильтр с переменной структурой, вход которого соединен с одним выходом блока вычисления модуля, а выход с элементбм умножения на постоянный коэффициент, блок умножения и интегратор, выход котоЬого подключен к одному входному каналу сумматора, связанного через уси литель мощности с выходным каналом регулятора Ц. Недостатком нзвестного регулятора является сложность конструкций. Цель изобретення - упрощение конструкции и повышение надежиос-ги регу лятора. Это достигается тем, что в регуляторе ёло1 умножения состоит из управляемого дросселя и элемента сравнения, выход которого подключен к входу категратора и другому входному кансшу суfretaTopa, управляющая камера управляилого дросселя подкл бчена к выходу элемента умножения на постоянный коэффициент, а его проточная камера - к другому выходу блока вычисления модуля, подключённым через блок предварения к атмосфере, вход которого соединен с выходом элемента сравнения. На чертеже приведена пр1;нципиальная схема предложенного регулятора. Регулятор cciBepKHTi элемент сравнения 1, блок предварения, содержащий элемент сравнения 2, переменный дроссель 3, емкость 4, фильтр с переменной структурой, содержа&жй элементы сравнения 5,6, переменные дроссели 7,8, емкость 9, блок вычисления модуля, содержащий (элементы сравнения 10,11,12, элёмеит умножения на постоянный коэффи1хиент 13, переменный дроссель 14, блок умножения, содержащий управляекмй дроссель 15, элемент сравнения 16, интегратор, содержащий элемент сравнения 17, переменный дроссель 18, емкость 19, сумматор 20 усилитель мощности 21, задатчик 22. . ..«-.„ Регулятор построен на стандартны элементах промышленной пневмоавтома тики . Регулятор работает следующим обр зом. Во входные каналы элемента сравн ния 1 подается давление, пропорциональное значению параметра: Р - за данному параметру и Р. - переменном параметру а также опорное давление РОI называемое условный ноль , . т.е. давление, которое проходит на исполнительный механизм. При Р, и Р на выходе элемента 1 имеет Давление равное Р Р -Р Ц-Р Р -Р р . 3 п е ВЫХ 3 П 3 1 давление посту с элемента пает в блок предварения, содержащий элемент сравнения 2, переменный дрос сель 3 и емкость 4.и в блок вычисления модуля на элементы сравнения 10,11. Выходным сигналом элемента сравнения 2 является давление, равноетаСРэ-Рп1 V,K,) Р Т-5 . BbixJ at 24 t (3) которое поступает науправляющий дроссель 15 и элементы сравнения 10,11. Блок умножения, состоящий из управляемого дросселя 15 и элёмента сравнения 16, на выходе формируе.т , си нал в виде Р .Г .dPe ) ,-( , к - множительный коэффициент, |Pg|- выход фильтра с переменной структурой; „ P in const - давление, при помощи которого устанавливается линейная часгь настраиваемого коэффициента ус.йл.ения ре1улятора, со.отг йётствуйщего макйййа 1ьн6му значений постоянной времени объекта. Интегратор, состоящий из элемент .-сравнения17, переменного дросселя 18 и емкости 19 с элементом сравнения 10, работающим в режиме суммиро вания, производит следующую операци - ;-(et0(-N;Mс учетом Р. получим т f а г ( вых Bbix()v3dr )(. Этот сигнал усиливается и подается, на исполнительный механизм объект управления. g контуре адаптации коэффициент (К/Р, f + К rtiin) формируется следующим 54 образом. и Рвыха прступчют в элементы сравнения 10,11 блока вычисления. На вход элемента сравнения 12 от эадатчика 22 поступает постоянное давление Р соответствующее линейной части коэффициента усиления регулятора. Выходной сигнал - абсолютное значение давления Р-. Рвь1Х12 /Pgf + P,f,c. элемента сравнения подается в блок фильтра с переменной структурой. Блок .фильтра функционирует по алгоритму T,(fPe()3/atfPeK e Гт -ггр-и, TC/PgOH Крг / Р / / Pg / , где Т , Т - постоянные времени фильтра. Выходной сигнал инерционного звена усиливается в элементе б и умножается в элементе 13 на масштабный, коэффициент к и далее поступает в . . основной контур регулятора. . Такое выполнение регулятора позволяет сократить в прототипе два пятимембранных, два трехмембранных элемента сравнения и три реле. Формула изобретения Адаптивный пневматичес1 ий регулятор, содержащий элемент сравнения, входные каналы которого подключены к каналам параметра, задания и .опорного давления, блок предварения, фильтр с переменной структурой, вход которого соединен с одним из выходов блока вычисления модуля, а выход с элементом умножения на постоянный коэффициент, блок умножения и интегратор, выход которого подключен к одному входному каналу сумматора, связанного через усилитель мощности с выходным каналом регулятора, отличающийся тем,что, с Целью упрощения и повышения надежности регулятора, в нем блок умножения состоит из управляемого дросселя и элемента сравнения, выход подключен к входу интегратораи другому входному каналу сумматора, управляющая камера управляемого дросселя подключена к выходу элемента умножения на/постоянный коэффициент, а его проточная камера - к другому выходу блока вычисления модуля,подключенный через блок предварения к атмосфере, вход которого соединен с выходом элемента сравнения. Источники информации, принятые во внимание при экспертизе 1. Шубладзе А. М. и др. Адаптивный ПИД регулятор. Ж. Приборы и системы управления , 1, 1977, с. 6-8.
zi
.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический адаптивный регулятор с переменной структурой | 1977 |
|
SU742872A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU631869A1 |
| Пневматический адаптивный регулятор | 1977 |
|
SU656022A1 |
| Пневматический регулятор с переменной структурой | 1976 |
|
SU631868A1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматический адаптивный регулятор с переменной структурой | 1983 |
|
SU1285429A1 |
| Пневматический регулятор | 1978 |
|
SU752229A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический регулятор | 1976 |
|
SU582494A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU679939A1 |